TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025020712
公報種別
公開特許公報(A)
公開日
2025-02-13
出願番号
2023124245
出願日
2023-07-31
発明の名称
モータ駆動用インバータおよびモータ駆動用インバータの制御方法
出願人
株式会社明電舎
代理人
個人
,
個人
,
個人
,
個人
主分類
H02P
21/22 20160101AFI20250205BHJP(電力の発電,変換,配電)
要約
【課題】モータ駆動用インバータにおいて、直流電源電圧や設定上限電圧などが変動しても、複数のテーブルを切り替える必要がなく演算の増加も少ない方法で電流指令を生成する。
【解決手段】電流指令生成部50は、d軸、q軸電流MTPAテーブル58d、58qで、トルク指令絶対値Trq_absに基づいてMTPAd軸、q軸電流指令Id_mtpa、Iq_mtpaを出力する。d軸、q軸電流ΨTテーブル67d、67qは、制限磁束Ψ_xとトルク入力Trq_yに基づいてΨTd軸、q軸電流指令Id_ΨT、Iq_ΨTを出力する。選択スイッチSW_Irefはトルク指令絶対値Trq_abs>下限トルクT_minの場合ΨTd軸、q軸電流指令Id_ΨT,Iq_ΨTをdq軸電流指令Idq_refとして出力し、それ以外の場合MTPAd軸、q軸電流指令Id_mtpa,Iq_mtpaをdq軸電流指令Idq_refとして出力する。
【選択図】図12
特許請求の範囲
【請求項1】
トルク指令と位相検出値に基づいて交流電圧指令と電圧位相指令を生成するトルク・電流制御部を備え、前記交流電圧指令と前記電圧位相指令に基づいてゲート信号を生成し、前記ゲート信号に基づいて主回路部が交流電圧を出力するモータ駆動用インバータであって、
前記トルク・電流制御部は、前記トルク指令と前記位相検出値に基づいてdq軸電流指令を生成する電流指令生成部を備え、前記dq軸電流指令に基づいて電圧振幅指令と前記電圧位相指令を生成し、前記電圧振幅指令と前記電圧位相指令に基づいて前記交流電圧指令を生成し、
前記電流指令生成部は、
トルク指令絶対値または前記トルク指令絶対値を上限以下に制限したMTPAトルク指令に基づいてMTPAd軸電流指令を出力するd軸電流MTPAテーブルと、
前記トルク指令絶対値または前記MTPAトルク指令に基づいて値を出力するq軸電流MTPAテーブルと、
前記q軸電流MTPAテーブルの出力に前記トルク指令の符号係数を乗算してMTPAq軸電流指令を出力する第1乗算器と、
制限磁束を生成する制限磁束演算部と、
前記制限磁束に基づいて上限トルクを出力する上限トルクテーブルと、
前記制限磁束に基づいて下限トルクを出力する下限トルクテーブルと、
前記トルク指令絶対値を前記上限トルクと前記下限トルクの間に制限してトルク入力として出力する第1飽和関数部と、
前記制限磁束と前記トルク入力に基づいてΨTd軸電流指令を出力するd軸電流ΨTテーブルと、
前記制限磁束と前記トルク入力に基づいて値を出力するq軸電流ΨTテーブルと、
前記q軸電流ΨTテーブルの出力に前記トルク指令の符号係数を乗算してΨTq軸電流指令を出力する第2乗算器と、
前記トルク指令絶対値>前記下限トルクの場合、前記ΨTd軸電流指令,前記ΨTq軸電流指令を前記dq軸電流指令として出力し、それ以外の場合、前記MTPAd軸電流指令,前記MTPAq軸電流指令を前記dq軸電流指令として出力する選択スイッチと、
を備えたことを特徴とするモータ駆動用インバータ。
続きを表示(約 3,900 文字)
【請求項2】
前記制限磁束演算部は、
直流電源電圧に1/√2を乗算する第3乗算器と、
前記第3乗算器に最大過変調率を乗算して飽和電圧を出力する第4乗算器と、
前記飽和電圧と制限電圧指令のうち小さい方を制限電圧として出力するmin関数部と、
前記制限電圧を速度検出値の絶対値で除算する除算器と、
前記除算器の出力を磁束上限値と磁束下限値の間に制限して前記制限磁束として出力する第2飽和関数部と、
を備えたことを特徴とする請求項1記載のモータ駆動用インバータ。
【請求項3】
前記トルク・電流制御部は、
以下の(8)式、(9)式、(10)式によって、dq軸電圧指令とdq軸非干渉電圧を演算する非干渉制御部と、
前記dq軸電流指令とdq軸電流検出値のdq軸電流偏差に基づいて電流制御を行い、前記電流制御の出力に前記dq軸非干渉電圧を加算した非干渉補償後の出力電圧指令を極座標変換して振幅と電流制御の位相指令を生成し、前記振幅を飽和電圧で制限した電流制御の電圧振幅指令を生成する電流制御振幅位相生成部と、
前記dq軸電圧指令から電圧位相制御の電圧振幅指令を生成し、速度検出値と前記電圧位相制御の電圧振幅指令に基づいて選択信号を生成し、前記選択信号に基づいて前記電圧位相制御の電圧振幅指令と前記電流制御の電圧振幅指令を切り替えて前記電圧振幅指令として出力する振幅切替部と、
前記dq軸電流指令を用いて(11)式により目標トルクを算出する第1トルク推定部と、前記dq軸電流検出値を用いて(11)式によりトルク推定値を算出する第2トルク推定部と、前記目標トルクと前記トルク推定値の偏差に基づいて電圧位相制御の位相指令を出力するトルク制御部と、前記電流制御の位相指令と前記電圧位相制御の位相指令を前記選択信号で切り替えて出力する第1スイッチと、を有する位相切替部と、
前記第1スイッチの出力に前記位相検出値を加算して前記電圧位相指令として出力する加算器と、
を備えたことを特徴とする請求項1記載のモータ駆動用インバータ。
TIFF
2025020712000022.tif
42
166
TIFF
2025020712000023.tif
41
166
TIFF
2025020712000024.tif
45
166
TIFF
2025020712000025.tif
34
166
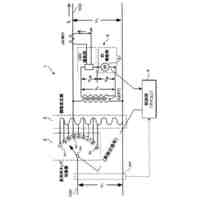
Vd_ref:d軸電圧指令
Vq_ref:q軸電圧指令
R1:抵抗
Id_ref:d軸電流指令
Iq_ref:q軸電流指令
Ld:d軸インダクタンス成分
Lq:q軸インダクタンス成分
ωr:速度検出値
Ψm:界磁磁束
ΔVFF_d:d軸インダクタンス電圧成分
ΔVFF_q:q軸インダクタンス電圧成分
ΔId:d軸電流偏差
ΔIq:q軸電流偏差
VFF_d:d軸非干渉電圧
VFF_q:q軸非干渉電圧
Trq:目標トルクまたはトルク推定値
Id:d軸電流指令またはd軸電流検出値
Iq:q軸電流指令またはq軸電流検出値
【請求項4】
前記制限磁束演算部は、
直流電源電圧に1/√2を乗算する第3乗算器と、
前記第3乗算器に最大過変調率を乗算して飽和電圧を出力する第4乗算器と、
前記飽和電圧と制限電圧指令のうち小さい方を制限電圧として出力するmin関数部と、
前記dq軸電流検出値または前記dq軸電流指令を前記電流制御の位相指令により回転座標変換してxy軸電流検出値に変換する回転座標変換部と、
前記xy軸電流検出値のx軸成分に抵抗を乗算して電圧降下成分を算出する第5乗算器と、
前記制限電圧から前記電圧降下成分を減算する減算器と、
前記減算器の出力を速度検出値の絶対値で除算する除算器と、
前記除算器の出力を磁束上限値と磁束下限値の間に制限して前記制限磁束として出力する第2飽和関数部と、
を備えたことを特徴とする請求項3記載のモータ駆動用インバータ。
【請求項5】
前記非干渉制御部は、電圧演算部とインダクタンス電圧演算部とを備え、
前記電圧演算部は、
d軸電流指令とq軸電流指令絶対値に基づいてd軸磁束成分を出力するd軸磁束テーブルと、
前記d軸電流指令と前記q軸電流指令絶対値に基づいて値を出力するq軸磁束テーブルと、
前記q軸磁束テーブルの出力にq軸電流指令の符号係数を乗算してq軸磁束成分を出力する第6乗算器と、を備え、
以下の(13)式により、前記dq軸電圧指令を算出し、
前記インダクタンス電圧演算部は、(9)式によりdq軸インダクタンス電圧成分を算出し、
前記dq軸電圧指令と前記dq軸インダクタンス電圧成分を加算した値を前記dq軸非干渉電圧とすることを特徴とする請求項3記載のモータ駆動用インバータ。
TIFF
2025020712000026.tif
46
166
Vd_ref:d軸電圧指令
Vq_ref:q軸電圧指令
R1:抵抗
Id_ref:d軸電流指令
Iq_ref:q軸電流指令
ωr:速度検出値
J:回転行列
Ψd:d軸磁束成分
Ψq:q軸磁束成分
【請求項6】
前記第1トルク推定部は、
前記d軸電流指令とq軸電流指令絶対値に基づいて値を出力する目標トルクテーブルと、
前記目標トルクテーブルの出力にq軸電流指令の符号係数を乗算して前記目標トルクとして出力する第7乗算器と、を備え、
前記第2トルク推定部は、
d軸電流検出値とq軸電流検出値の絶対値に基づいて値を出力するトルク推定テーブルと、
前記トルク推定テーブルの出力にq軸電流検出値の符号係数を乗算して前記トルク推定値として出力する第8乗算器と、
を備えたことを特徴とする請求項3記載のモータ駆動用インバータ。
【請求項7】
前記第1トルク推定部は、
前記トルク指令絶対値が前記下限トルクよりも大きい場合は前記トルク入力を出力し、それ以外の場合は前記トルク指令絶対値または前記MTPAトルク指令を出力する第2スイッチと、
前記第2スイッチの出力に前記トルク指令の符号係数を乗算して前記目標トルクとして出力する第9乗算器と、を備え、
前記第2トルク推定部は、
d軸電流検出値とq軸電流検出値絶対値に基づいて値を出力するトルク推定テーブルと、
前記トルク推定テーブルの出力にq軸電流検出値の符号係数を乗算して前記トルク推定値として出力する第8乗算器と、
を備えたことを特徴とする請求項3記載のモータ駆動用インバータ。
【請求項8】
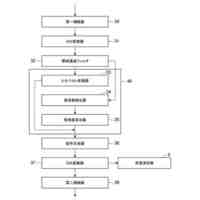
トルク指令と位相検出値に基づいて交流電圧指令と電圧位相指令を生成するトルク・電流制御部を備え、前記交流電圧指令と前記電圧位相指令に基づいてゲート信号を生成し、前記ゲート信号に基づいて主回路部が交流電圧を出力するモータ駆動用インバータの制御方法であって、
前記トルク・電流制御部は、
電流指令生成部で前記トルク指令と前記位相検出値に基づいてdq軸電流指令を生成し、
前記dq軸電流指令に基づいて電圧振幅指令と前記電圧位相指令を生成し、前記電圧振幅指令と前記電圧位相指令に基づいて前記交流電圧指令を生成し、
前記電流指令生成部は、
d軸電流MTPAテーブルが、トルク指令絶対値または前記トルク指令絶対値を上限以下に制限したMTPAトルク指令に基づいてMTPAd軸電流指令を出力し、
q軸電流MTPAテーブルが、前記トルク指令絶対値または前記MTPAトルク指令に基づいて値を出力し、
第1乗算器が、前記q軸電流MTPAテーブルの出力に前記トルク指令の符号係数を乗算してMTPAq軸電流指令を出力し、
制限磁束演算部が、制限磁束を生成し、
上限トルクテーブルが、前記制限磁束に基づいて上限トルクを出力し、
下限トルクテーブルが、前記制限磁束に基づいて下限トルクを出力し、
第1飽和関数部が、前記トルク指令絶対値を前記上限トルクと前記下限トルクの間に制限してトルク入力として出力し、
d軸電流ΨTテーブルが、前記制限磁束と前記トルク入力に基づいてΨTd軸電流指令を出力し、
q軸電流ΨTテーブルが、前記制限磁束と前記トルク入力に基づいて値を出力し、
第2乗算器が、前記q軸電流ΨTテーブルの出力に前記トルク指令の符号係数を乗算してΨTq軸電流指令を出力し、
選択スイッチが、前記トルク指令絶対値>前記下限トルクの場合、前記ΨTd軸電流指令,前記ΨTq軸電流指令を前記dq軸電流指令として出力し、それ以外の場合、前記MTPAd軸電流指令,前記MTPAq軸電流指令を前記dq軸電流指令として出力する、
ことを特徴とするモータ駆動用インバータの制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、PMモータの可変速駆動に係り、高い回転速度で、かつトルク制御を適用する用途に関する。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
非特許文献1,2には、「たすきがけ制御」が開示されている。
【0003】
非特許文献3には「PMモータのV/F制御」が開示されており、位相検出を使用しないVF制御型のトルク制御が記載されている。q軸電流の微分成分を周波数に補正して安定化を図り、さらに最大トルク/電流特性を無効電力による電圧位相補正によって実現している。
【0004】
トルク指令に追従させるのではなく、最大トルク/電流特性を維持する方法として、電流振幅に対する無効電力を計算し、この関係が成立するように電圧位相を調整している。
【0005】
しかし、直流電源電圧が低下して出力電圧の上限が制限された場合など、最大トルク/電流特性よりも弱め界磁を強く(Idを負側に増加)する対応までは検討されていない。速度-トルク特性として定トルク/定出力範囲の分類があるが、定トルクの領域に適用するものであり、定出力範囲までは考慮されていない。
【0006】
非特許文献4には「電圧位相制御(1)」が開示されており、トルク指令とトルク推定が一致するように電圧位相を調整する方法が記載されている。しかし、電圧波形は正弦波振幅を過大に設定して直流電源電圧Vdcでカットしただけであり、線形性の工夫などはない。
【0007】
非特許文献6には「電圧位相制御(2)」が開示されており、電流制御モードと電圧位相制御の切り替え方式についての記載がある。従来技術3では、非特許文献6の「Fig.3 (a) conventional method」に示された構成図を参考にしている。
【0008】
特許文献1には「電圧位相制御(3)」が開示されており、電流制御と電圧位相制御を組み合わせて切り替える方法が記載されている。1パルス変調ではなく変調率mの可変電圧を設定している。逆に、同期PWMへの切り替えに関する記載はない。電流制御(変調率<1)と1パルスPWM波形による電圧位相制御(変調率>1)を切り替えている。この、電流制御と電圧位相制御は別の構成であり、相互の情報交換(初期化)はあるが切り替え時の電圧変化抑制の詳細までは示されていない。過変調についても、電圧指令を拡大してリミットする単純な方式である。
【0009】
特許文献2には「6次高調波による過変調方式」が開示されており、正弦波キャリア比較PWM方法にて、電圧飽和時に出力電圧限界を拡大する方法が記載されている。この過変調方式は下記のような特徴があり、これと後述する「同期キャリア」とを組み合わせて「電圧位相制御のPWM生成」に利用する。
・過変調時に生じる高調波は5次と7次(回転座標系で6次)のみ。
・PWMキャリア周期は一定でよい。
・二相変調の適用方法を指定することにより、細いパルスを防止できる。
【0010】
(先行技術文献等に記載の技術内容の概要)
「使用する用語」
PWM:パルス幅変調(Pulse Width Modulation)
ACR:自動電流調整器…電流制御器(Automatic current regulator)
PI制御:比例積分制御(Proportional-Integral Controller)
PLL:位相同期回路・位相同期フィードバックループ(Phase Locked Loop)
PMSM:永久磁石同期電動機(Permanent Magnet Synchronous Motor)
IPMSM:埋込磁石同期電動機(Interior Permanent Magnet Synchronous Motor)。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社明電舎
電力変換装置
1か月前
個人
発電機
16日前
個人
発電機
20日前
ニデック株式会社
モータ
12日前
西芝電機株式会社
回転電機
2日前
株式会社アイシン
車両用駆動装置
28日前
富士電機株式会社
半導体装置
20日前
トヨタ自動車株式会社
充電システム
1日前
株式会社シマノ
電力供給装置
21日前
株式会社アイドゥス企画
負荷追従電動モータ
6日前
株式会社ダイヘン
電力システム
22日前
ダイハツ工業株式会社
モータ製造装置
5日前
新光電子株式会社
発振器
1日前
トヨタ自動車株式会社
蓄電池制御装置
22日前
ミネベアミツミ株式会社
モータ
1日前
株式会社浅羽製作所
通線用先端誘導具
27日前
株式会社ダイヘン
電圧調整装置
12日前
株式会社アイシン
回転電機用ステータ製造方法
7日前
日本航空電子工業株式会社
シール構造体
1か月前
株式会社デンソー
電気機器
1日前
株式会社アイドゥス企画
磁力トルクコンバータ
6日前
株式会社アイシン
回転電機用ステータ製造方法
7日前
ミネベアミツミ株式会社
発電装置
1日前
株式会社ダイヘン
蓄電池システム
27日前
トヨタ紡織株式会社
磁石挿入装置
12日前
株式会社ゲットクリーンエナジー
発電機
13日前
ミネベアミツミ株式会社
発電装置
1日前
矢崎総業株式会社
グロメット
1か月前
キヤノン株式会社
電源装置、画像形成装置
21日前
株式会社ダイヘン
無線給電システム
12日前
トヨタ自動車株式会社
充電制御装置
20日前
日本精工株式会社
モータ
今日
GX株式会社
可搬式太陽光発電用電源装置
20日前
株式会社オリジン
充電器
1か月前
株式会社キャップ
アキシャルギャップモータ
16日前
株式会社TMEIC
電力変換装置
5日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ