TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025011263
公報種別
公開特許公報(A)
公開日
2025-01-23
出願番号
2024180655,2021550169
出願日
2024-10-16,2020-03-16
発明の名称
小荷物の検出とインテリジェントな仕分け
出願人
レイトラム,エル.エル.シー.
代理人
弁理士法人北青山インターナショナル
主分類
B07C
1/10 20060101AFI20250116BHJP(固体相互の分離;仕分け)
要約
【課題】選択された行先に小荷物を仕分ける仕分けコンベヤおよび方法を提供する。
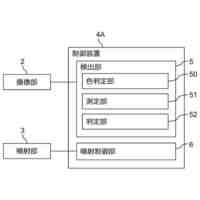
【解決手段】マルチコア分類プロセッサ36によって実行されるニューラルネットワークが、送り込みコンベヤ18、19上に搬送される小荷物単位の取り込み画像を使用して、各小荷物単位を分類する。制御プロセッサ34が、仕分けコンベヤ26を制御して、各小荷物単位を小荷物単位の分類に応じた行先に指向させる。
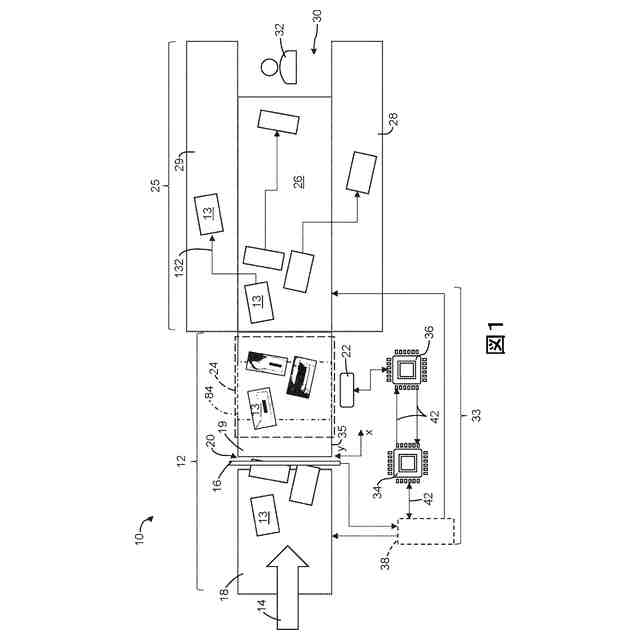
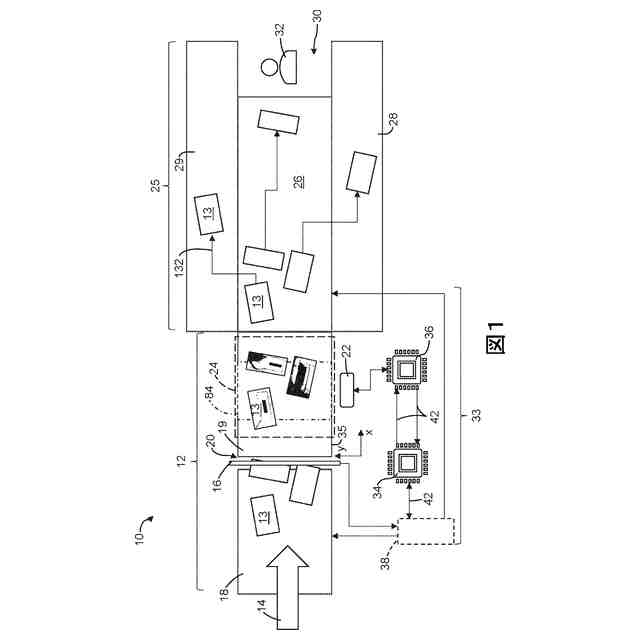
【選択図】図1
特許請求の範囲
【請求項1】
分離された小荷物単位を搬送方向の下流に搬送する送り込みコンベヤ区画と;
前記送り込みコンベヤ区画に沿った検出位置で前記小荷物単位を検出する小荷物単位検出器と;
前記送り込みコンベヤ区画の目標物ゾーン内の前記小荷物単位の画像を取り込む撮像システムと;
プログラム命令を実行する計算機処理システムであって、前記小荷物単位のそれぞれの位置を、それらが前記送り込みコンベヤ区画上を搬送されるさいに追跡するプログラム命令、および前記小荷物単位の画像のそれぞれを、小荷物単位の組を認識するように訓練された分類器への入力として提供するプログラム命令、および分類器が認識するように訓練された前記小荷物単位の組の構成員の1つに対応する分類を、前記小荷物単位のそれぞれに割り当てるプログラム命令、を実行する計算機処理システムと;
前記送り込みコンベヤ区画から前記小荷物単位を受け取る、下流のコンベヤ区画と;
を具備するコンベヤシステムであって、前記下流のコンベヤ区画を制御して各小荷物単位を前記小荷物単位の分類に応じて搬送するプログラム命令を、前記計算機処理システムが実行する、コンベヤシステム。
続きを表示(約 1,300 文字)
【請求項2】
前記計算機処理システムが:
前記送り込みコンベヤ区画上の前記小荷物単位のそれぞれの位置を、それらが前記搬送方向に前進するさいに、前記検出位置を通過しているものとして検出されたそれらの占有面積から計算するプログラム命令;
前記撮像システムを制御して、小荷物単位の1つまたは複数のものの画像を、前記小荷物単位の1つまたは複数のものの前記計算された位置が前記送り込みコンベヤ区画上の前記目標物ゾーン内にある場合に取り込んで、前記目標物ゾーン内の前記小荷物単位の前記1つまたは複数のものの画像を生成するプログラム命令;
前記画像を切り抜いて、1つまたは複数の切り抜き画像にし、前記各切り抜き画像を前記目標物ゾーン内の前記1つまたは複数の小荷物単位の1つに対応させるプログラム命令;
前記切り抜き画像を分類して、前記分類の一つにするプログラム命令、
を実行する、請求項1に記載のコンベヤシステム。
【請求項3】
前記計算機処理システムが、前記検出された占有面積の重心の座標を計算し、前記重心が、前記送り込みコンベヤ区画上の前記小荷物単位の位置を定義する、請求項2に記載のコンベヤシステム。
【請求項4】
前記計算機処理システムが、前記画像を切り抜く前に、前記搬送方向を基準にして非斜角の向きに前記画像を回転させる、請求項2に記載のコンベヤシステム。
【請求項5】
前記計算機処理システムが、プログラム命令を並列に実行する複数のコアを有するマルチコア・プロセッサを含む、請求項2に記載のコンベヤシステム。
【請求項6】
第1のプロセッサと、前記下流のコンベヤ区画を制御して、前記小荷物単位のそれぞれを、前記小荷物単位の分類に応じた複数の行先のうちの1つに仕分ける第2のプロセッサとを、前記計算機処理システムが含む、請求項1に記載のコンベヤシステム。
【請求項7】
前記分類器が認識するように訓練された前記小荷物単位の組が:(a)ポリ袋;(b)ポリ袋ではない認識された単一の小荷物;(c)重なりが所定の百分率未満である小荷物の積み重なり;(d)重なりが所定の百分率より大きい小荷物の積み重なりである、請求項6に記載のコンベヤシステム。
【請求項8】
前記第2のプロセッサが、前記仕分け機を制御して、重なりが前記所定の百分率より大きい小荷物の積み重なりとして、または認識されなかった小荷物単位として分類された小荷物単位を、人間の作業者を配置させた行先に仕分ける、請求項7に記載のコンベヤシステム。
【請求項9】
前記第2のプロセッサが、前記仕分け機を制御して、認識された単一の小荷物として、または重なりが所定の百分率未満である小荷物の積み重なりとして分類された小荷物単位を、下流の行先に仕分けてさらに処理する、請求項7に記載のコンベヤシステム。
【請求項10】
前記小荷物単位検出器が、前記小荷物単位の占有面積を検出する、請求項1に記載のコンベヤシステム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は概して、動力駆動式のコンベヤに関するものであり、より詳細には、人工知能を用いて小荷物を分類し、小荷物をその分類に応じた行先に仕分けするコンベヤに関するものである。
続きを表示(約 4,700 文字)
【背景技術】
【0002】
小荷物取り扱い業界では、仕分けコンベヤを使用して、無秩序な方向を向いたそして様々なサイズや形状の積み重ねられた小荷物の積み荷の流れから、個々の小荷物を仕分けている。しかし、小荷物を適切な行先に仕分けできるようにする前に、それらの小荷物どうしを分離する必要がある。コンベヤは、様々な技術を用いて、積み荷の流れを個々の小荷物に分離する。しかし時折、コンベヤが、すべての小荷物の分離に失敗し、人手による介入が必要になることがある。また、特大の箱は、渋滞の原因となることにより問題になる可能性があり、これが認識された場合には、その箱は手作業で取り除かれる。しかし、特大のポリ袋は柔軟性があるので、渋滞の原因とはならないこともある。そのため、こうした袋を仕分け機から取り除くことで、全体としてのスループットが低下する。
【発明の概要】
【0003】
本発明の特徴を具現化した一形式のコンベヤシステムは、分離された小荷物単位を搬送方向下流に搬送する送り込みコンベヤ区画を具備する。小荷物単位検出器が、送り込みコンベヤ区画に沿った検出位置で小荷物単位を検出する。撮像システムが、送り込みコンベヤ区画の目標物ゾーン内の小荷物単位の画像を取り込む。計算機処理システムが、送り込みコンベヤ区画上を小荷物単位が搬送されると小荷物単位のそれぞれの位置を追跡するプログラム命令、および小荷物単位の画像のそれぞれを分類器への入力として提供するプログラム命令を実行する。分類器は、一組の小荷物単位を認識するように訓練され、そして分類器が認識するように訓練された一組の小荷物単位の構成員の1つに対応する分類を、小荷物単位のそれぞれに割り当てるように訓練される。下流のコンベヤ区画が、送り込みコンベヤから小荷物単位を受け取る。計算機処理システムは、下流のコンベヤ区画を制御して各小荷物単位をその小荷物単位の分類に応じて搬送するプログラム命令を実行する。
【0004】
小荷物単位を搬送方向下流に搬送スピードで搬送する送り込みコンベヤ区画を、別形式のコンベヤシステムが具備する。送り込みコンベヤ区画に沿った検出位置に、占有面積検出器が配置される。検出位置の下流の送り込みコンベヤ区画に沿ってカメラが配置され、送り込みコンベヤ区画上の取り込みエリアの画像を取り込む。仕分けコンベヤ区画が、送り込みコンベヤ区画から小荷物単位を受け取り、小荷物単位を複数の行先に選択的に仕分ける。制御プロセッサが:(1)占有面積検出器を動作させて、検出位置を過ぎて搬送方向に前進する小荷物単位の占有面積を検出するプログラム命令;および(2)仕分けコンベヤ区画および送り込みコンベヤ区画を制御するプログラム命令を実行する。制御プロセッサと通信している分類プロセッサが:(1)送り込みコンベヤ区画上の小荷物単位のそれぞれの位置を、それらがコンベヤに沿って前進するさいに、検出位置を通過しているものとして検出されたそれらの占有面積から計算するプログラム命令;(2)小荷物単位の1つまたは複数のものの計算された位置が、送り込みコンベヤ区画上の取り込みエリアの目標物ゾーン内にある場合に、カメラを制御して、小荷物単位の1つまたは複数ものの画像を取り込んで、取り込みエリア内の小荷物単位の1つまたは複数のものの画像を生成するプログラム命令;(3)画像を切り抜いて、1つまたは複数の切り抜き画像にし、各切り抜き画像を取り込みエリア内の1つまたは複数の小荷物単位の1つに対応させるプログラム命令;および(4)人工知能を使用して、切り抜き画像を分類して複数の分類にし、これを、1つまたは複数の小荷物単位のそれぞれに分類の1つを割り当てることにより行うプログラム命令、を実行する。制御プロセッサは、仕分けコンベヤ区画を制御して、1つまたは複数の小荷物単位のそれぞれを、小荷物単位の分類に応じた行先に仕分ける。
【0005】
別の態様では、送り込みコンベヤ区画上で搬送される小荷物を仕分ける、プロセッサ実装された方法が:(a)送り込みコンベヤ区画上を搬送スピードで搬送方向に検出位置を過ぎて前進する複数小荷物単位を検出することと;(b)送り込みコンベヤ区画上の検出位置を通過しているものとして検出された複数小荷物単位のそれぞれの位置を、それらがコンベヤに沿って前進するさいに計算することと;(c)送り込みコンベヤ区画上の画像取り込みエリア内の複数小荷物単位の1つまたは複数のものを撮像して、取り込みエリア内の複数小荷物単位の1つまたは複数のものの画像を生成することと;(d)画像を切り抜いて1つまたは複数の切り抜き画像にし、各切り抜き画像を画像取り込みエリア内の1つまたは複数の複数小荷物単位の1つに対応させることと;(e)人工知能を使用して切り抜き画像を複数の分類に分類し、これを、1つまたは複数の複数小荷物単位のそれぞれに分類の1つを割り当てることにより行うことと;(f)1つまたは複数の複数小荷物単位のそれぞれを、小荷物単位の分類に応じた行先に仕分けることと、を含む。
【図面の簡単な説明】
【0006】
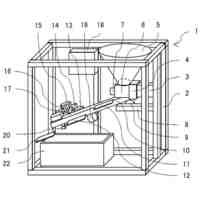
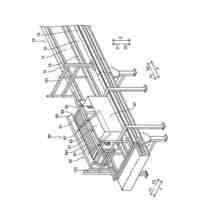
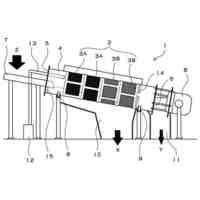
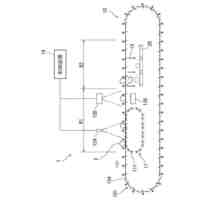
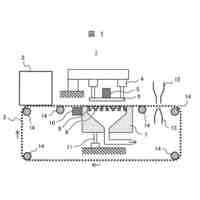
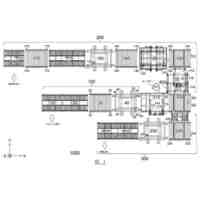
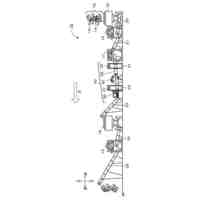
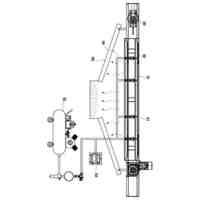
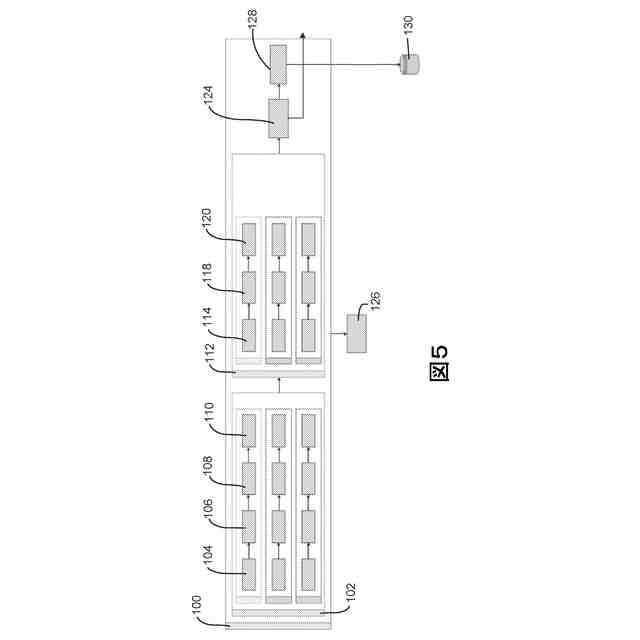
本発明の特徴を具現化した搬送システムの上面図である。
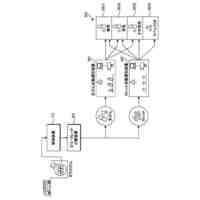
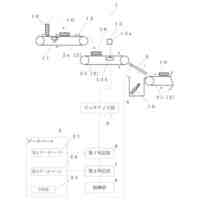
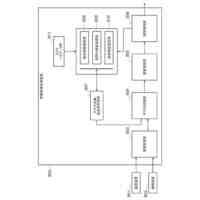
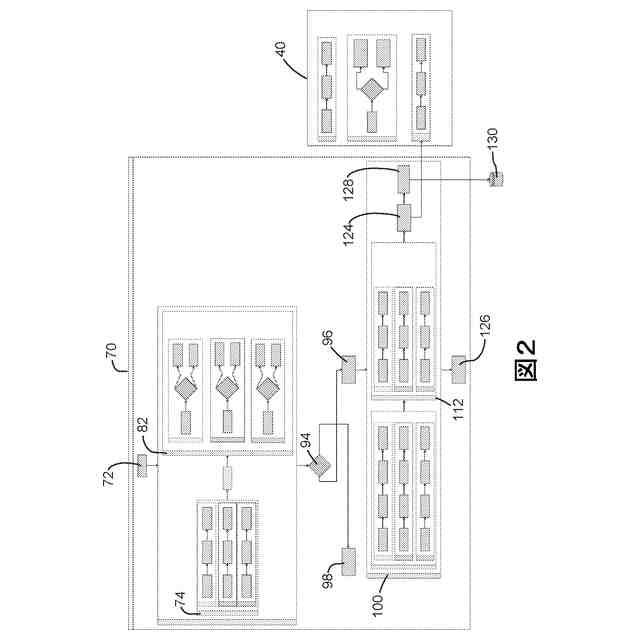
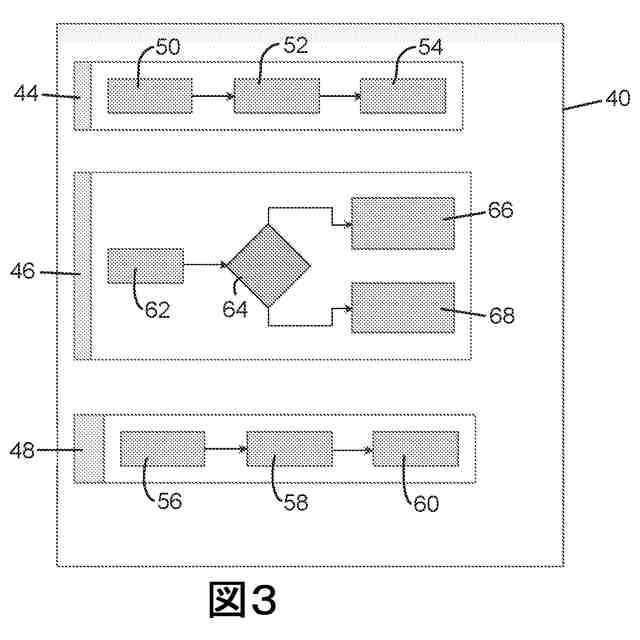
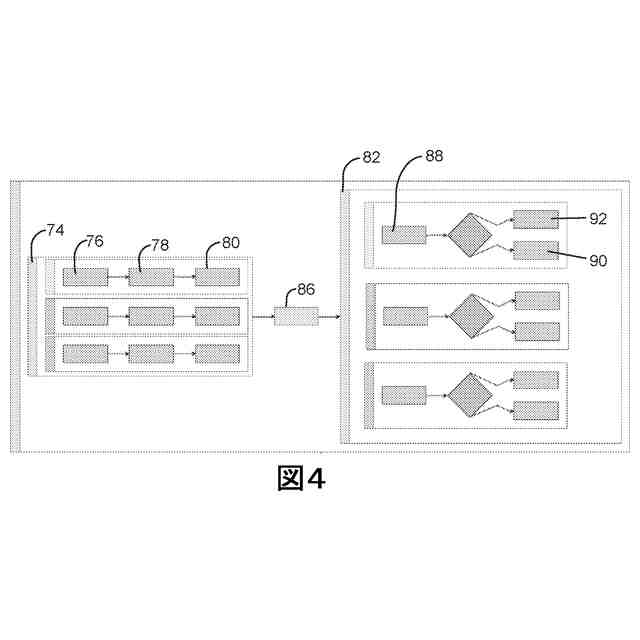
図1のコンベヤシステム用のマルチコア分類プロセッサおよび制御プロセッサによって実行されるプログラム命令の流れ図である。
図2のTCP接続管理タスクの拡大流れ図である。
図2の小荷物追跡タスクの拡大流れ図である。
図2の画像処理タスクと小荷物分類タスクの拡大流れ図である。
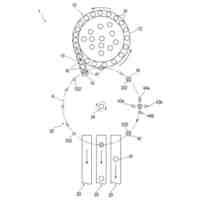
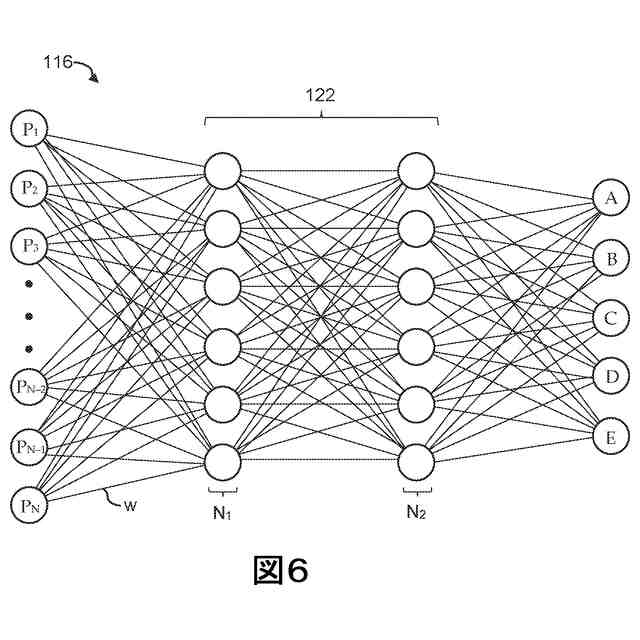
図1のコンベヤシステムにおいて使用可能なニューラルネットワークの動作を説明する手助けとして使用される例示的なニューラルネットワークの概略図である。
【発明を実施するための形態】
【0007】
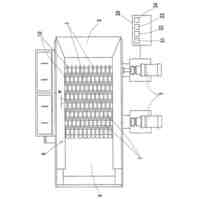
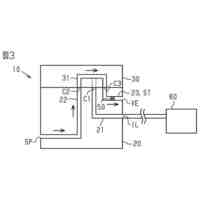
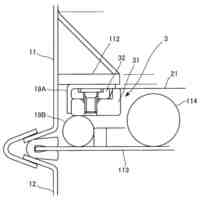
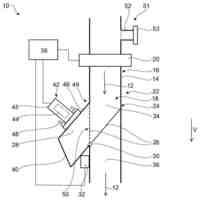
小荷物をインテリジェントに仕分ける本発明の特徴を具現化するコンベヤシステムを図1に示す。コンベヤ10は、小荷物13を搬送方向14下流に搬送する送り込みコンベヤ区画12を含む。検出位置に、送り込みコンベヤ区画12に沿って小荷物単位検出器16が配置されている。この例では、送り込みコンベヤ区画12は、一連の2つのコンベヤ:つまり小荷物単位検出器16の上流にある第1のコンベヤ18と、小荷物単位検出器の下流にある第2のコンベヤ19として図示されている。両コンベヤ18、19は例えば、ベルト・コンベヤ、スラット・コンベヤ、チェーン・コンベヤ、またはローラ・コンベヤとして実現することができる。送り込みコンベヤ区画12は、単一のコンベヤとして、または2台より多いコンベヤとして実現することができる。この2コンベヤ形式では、小荷物単位検出器16は、送光器配列から2台のコンベヤ18、19の間の間隙20を通して受光器配列に幕状の光を放射する。受光器と送光器は、コンベヤ区画12の両側、一方が下に、もう一方が上に配置されている。結果として得られる幕状の光は、コンベヤ区画12の幅にまたがって広がる。幕状の光を通過する小荷物13が、送光ビームを遮断し、受光器配列にこのビームが到達するのを阻止する。小荷物13が小荷物単位検出器16を通過すると、その占有面積、すなわち、送り込みコンベヤ区画上へのその投影を、遮断された受光器のパターンから決定することができる。よって、この形式では、小荷物単位検出器16は、占有面積検出器である。他の種類の小荷物単位検出器、例えばレーザ距離計やカメラをかわりに使用することができる。
【0008】
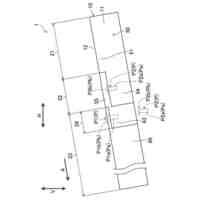
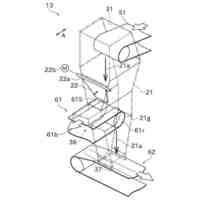
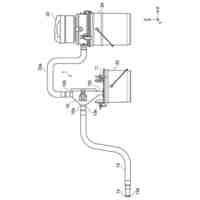
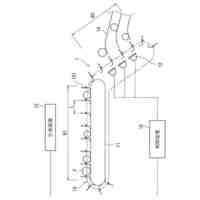
小荷物単位検出器16の下流に、送り込みコンベヤ区画12に沿って、カメラ22を含む撮像システムが位置している。カメラ22は、送り込みコンベヤ区画12の搬送側の一続きの範囲を、その幅にまたがって対象範囲とする取り込みエリア24を有する。撮像システムは、取り込みエリア24を通過する小荷物13の画像を取り込む。送り込みコンベヤ区画12を出る小荷物13は、下流の仕分けコンベヤ区画25上で受け取られる。仕分けコンベヤ区画25は、仕分けコンベヤ26として、例えば2台のフランキング・コンベヤ(flanking conveyor)28、29のうちの一方に物品を転向させるために選択的に作動して回転するローラを有するローラ・ベルトとして、実現することができる。仕分けコンベヤ26およびフランキング・コンベヤ28、29は、まさに2つの例として、動力付きローラ・コンベヤであってもよいし、またはモジュラー・プラスチック・ベルト・コンベヤであってもよい。また、送り込みコンベヤ区画12と仕分けコンベヤ26は、単一のコンベヤベルトにより実現することができる。一形式では、仕分けコンベヤ26は、イントラロックス社(Intralox,L.L.C.)、ハラハン(Harahan)、ルイジアナ州、米国が製造販売するINTRALOX(登録商標)Series7000アクティベーティッド・ローラ・ベルト・コンベヤ(activated-roller-belt conveyor)である。フランキング・コンベヤ28、29も同様に、例えば、ローラ・ベルト、フラット・ベルト、モジュラー・プラスチック・ベルト、スロット・コンベヤ、シュート(chute)、またはローラ・コンベヤによって実現することができる。仕分けコンベヤは、そのローラを選択的に作動させることにより、3つの行先、つまり:(1)右のフランキング・コンベヤ28;(2)左のフランキング・コンベヤ29;または(3)受け取った小荷物単位をどのように処分するかを決めることのできる人間の作業者32を配置させているのが示された行先30、のうちの1つに小荷物を転向させる。
【0009】
占有面積検出器16の出力は、検出位置で検出器を通過する小荷物13の占有面積を決定するようにプログラムされた制御プロセッサ34を含む計算機処理システム33に送られる。(計算機処理システム33は、定数、および1つまたは複数のプロセッサによって実行されるプログラム命令を記憶するプログラムメモリと、計算、テーブル、およびその他の一時的または変更可能な情報を記憶する揮発性データメモリとを含む)。いくつかの小荷物は、他の小荷物から分離されていない場合がある。それらの重なり合った、すなわち積み重ねられた小荷物は、単一の分離された小荷物の占有面積とは異なる形状となり得る占有面積を有する。この理由から、占有面積検出器16は、単一の分離された小荷物を包含する分離された小荷物単位の占有面積と、占有面積が単一の輪郭線によって定義される、重なり合ったまたは積み重ねられた小荷物の群の占有面積とを検出する。
【0010】
制御プロセッサ34は、検出位置を通過する小荷物単位の個々の占有面積を定義する、記憶されたプログラム命令を実行する。例えば、各占有面積は、その隅の座標によって、または制御プロセッサ34によって計算されたその重心によって定義することができる。送り込みコンベヤ上の各小荷物単位の位置は、x-y座標系におけるその座標によっていつでも記述することができ、この座標系は例えば、検出位置をx=0という基準位置とし、送り込みコンベヤ区画12の右側縁35をy=0という基準位置とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
穀物選別機
14日前
株式会社スズ建
自走式ふるい選別装置
3か月前
シブヤ精機株式会社
農産物選別装置
19日前
近江度量衡株式会社
青果物の選別装置
1か月前
シブヤ精機株式会社
農産物選別システム
18日前
川崎重工業株式会社
廃棄物処理システム
1か月前
川崎重工業株式会社
廃棄物処理システム
1か月前
株式会社タクマ
分別システム及び分別方法
4か月前
株式会社パウレック
粉粒体の検査選別装置
3か月前
株式会社パウレック
粉粒体の検査選別装置
3か月前
大仲建設株式会社
汚泥処理装置
4か月前
セキ工業株式会社
部品分別装置
1か月前
株式会社イシダ
物品振分判定装置
3か月前
株式会社アーステクニカ
分配機、分配選別設備及び分配方法
3か月前
キヤノン株式会社
分別装置及び分別方法
4日前
新東工業株式会社
分級装置及び粉塵固化システム
1か月前
ヤンマーホールディングス株式会社
選別装置
1か月前
株式会社栗本鐵工所
ローラスクリーン
21日前
ヤンマーホールディングス株式会社
選別装置
2か月前
株式会社村田製作所
気体噴出装置、及び電子部品の選別装置
2か月前
株式会社日本選別化工
小型家電ごみの処理装置
3か月前
株式会社サタケ
光学式選別機
2か月前
株式会社日立ハイテク
分級装置、及びそれを用いた粉体の分級方法
1か月前
不二パウダル株式会社
網固定具
1か月前
シーエスジャパン株式会社
パレット搬送装置及びパレット搬送システム
2か月前
株式会社日立ハイテク
粉体処理装置、およびそれを用いた粉体処理方法
1か月前
アンリツ株式会社
物品検査システム
2か月前
キヤノン株式会社
分級結果予測方法、粒子の製造方法、分級結果予測装置および分級システム
1か月前
日新化成株式会社
粉粒体中の異物の検査・排出装置
1か月前
株式会社FUJI
廃材処理システム
1か月前
株式会社ナベル
卵処理装置、卵処理装置の制御プログラム、及び、卵処理装置の制御方法
3か月前
株式会社ダウォン産業
エアパルスを利用して廃棄物にくっ付いた夾雑物を分離及び除去する選別コンベヤ
3か月前
シーエスジャパン株式会社
パレット搬送装置及びパレット搬送システム
2か月前
ネッツシュ-ファインマールテヒニック ゲーエムベーハー
摩耗防止用のハイブリッド分離器ホイールベーンを備える分離器ホイール
2か月前
ミネベア インテック アーヘン ゲーエムベーハー ウント ツェーオー カーゲー
搬送流から金属物を取り除くための装置ならびに方法
3か月前
日立Astemo株式会社
車載画像処理装置
4か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ