TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025009910
公報種別
公開特許公報(A)
公開日
2025-01-20
出願番号
2024095910
出願日
2024-06-13
発明の名称
光三角測量に基づく3次元イメージングに関するイメージングシステムおよび方法
出願人
シック アイヴィピー エービー
代理人
個人
,
個人
,
個人
主分類
G01B
11/25 20060101AFI20250109BHJP(測定;試験)
要約
【課題】光三角測量に基づく3次元イメージングのためのイメージングシステムにおける歪みの低減をサポートするための方法を提供する。
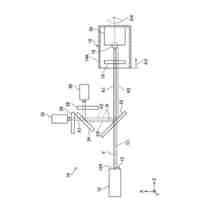
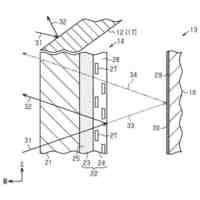
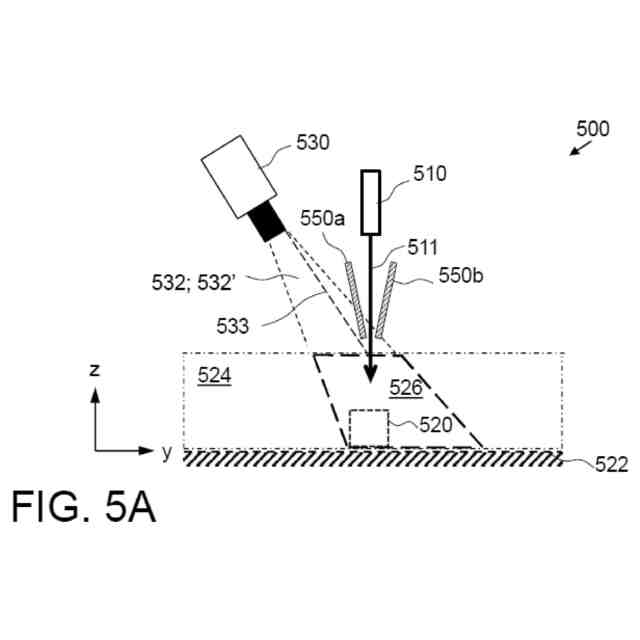
【解決手段】イメージングシステム500は、カメラ530および構造化光511を含む物体520の照射を提供する光源510を備える。構造化光511は、物体520を含む仮想ボリューム524であって、イメージングシステムが撮像するように構成される、物体520がイメージング中に存在するボリュームに相当する、仮想ボリューム524と交差する。少なくともカメラ530によるイメージング中に、光源510からの迷光がカメラ530の視野532内で仮想ボリューム524に達するのを防止される。イメージングシステム500において、光源510と仮想ボリューム524との間で構造化光511の外側に配置される遮光体550a、550bによって達成される。
【選択図】図5A
特許請求の範囲
【請求項1】
光三角測量に基づく物体(520)の3次元イメージングのための、イメージングシステム(500;700;800)であって、カメラ(530)と、構造化光(511)を含む前記物体(520)の照射を提供するように構成される光源(510)とを備え、前記カメラ(530)が、前記カメラ(530)が前記光三角測量の一部として前記物体(520)から反射された構造化光(511)を画像に取得することができるように、前記提供される構造化光(511)に対して配置され、それによって前記光三角測量に従って、前記画像に取得された反射された構造化光の位置が、前記構造化光(511)が前記物体(520)によって反射された実世界位置にマッピングし、前記構造化光(511)が、前記物体(520)を含む仮想ボリューム(524)であって、前記イメージングシステムが撮像するように構成される、前記物体(520)を含む、1つまたは複数の物体が前記イメージング中に存在するボリュームに相当する、仮想ボリューム(524)と交差し、
前記イメージングシステム(500;700;800)が、前記光源(510)と前記仮想ボリューム(524)との間で前記構造化光(511)の外側に配置される遮光体(550;750;850)であって、前記遮光体(550;750;850)が前記光源(510)からの迷光(415)を遮断し、それによってそれが前記カメラ(530)の視野(532)内で前記仮想ボリューム(524)に達するのを防止するように配置される、遮光体(550;750;850)を更に備える、イメージングシステム。
続きを表示(約 1,900 文字)
【請求項2】
前記遮光体(550;750;850)が、前記構造化光(511)の照射方向に直交する1つまたは複数の方向に延在を有する1つまたは複数の遮光主要表面を有する、請求項1に記載のイメージングシステム。
【請求項3】
前記遮光体(550;750;850)が、前記光源(510)と前記仮想ボリューム(524)との間で、前記構造化光(511)までの距離が前記仮想ボリューム(524:724;824)の方向に減少して前記構造化光(511)の外側に延在する、請求項1または2に記載のイメージングシステム。
【請求項4】
前記遮光体(550;750;850)が、前記照射がその最大強度の5%に低下したところよりも前記構造化光(511)に近い前記照射の光を前記遮光体(550;750;850)が遮断することをそれによって回避するように、前記構造化光(511)までの距離を保って前記構造化光(511)の外側に配置される、請求項1から3のいずれか一項に記載のイメージングシステム。
【請求項5】
前記遮光体(550;750;850)が、前記構造化光(511)までの距離を保つが、前記照射がその最大強度の1%に低下したところの前記照射の光を前記遮光体(550;750;850)が少なくとも遮断するほどの近さで、前記構造化光(511)の外側に配置される、請求項1から4のいずれか一項に記載のイメージングシステム。
【請求項6】
前記遮光体が、
前記カメラ(530)の方向に前記構造化光(511)の第1の側に配置される第1の遮光体部(550a;750a;850a)および/または、
前記カメラ(530)の反対方向に前記構造化光(511)の第2の側に配置される第2の遮光体部(550b;750b;850b)を備える、請求項1から5のいずれか一項に記載のイメージングシステム。
【請求項7】
前記第1の遮光体部(550a;750a;850a)が、前記仮想ボリューム(524)において前記構造化光(511)をカバーしている前記カメラ(530)の視野(532;732;832)の少なくとも一部(532’;732’;832’)の外側に配置される、請求項6に記載のイメージングシステム。
【請求項8】
前記遮光体(550;750;850)が、前記遮光体(550;750;850)が前記仮想ボリューム(524)に最も近いところで、および/または前記遮光体(550;750;850)が、前記照射が焦点を有するところに最も近いところで、前記構造化光に最も近い、請求項1から7のいずれか一項に記載のイメージングシステム。
【請求項9】
光三角測量に基づく3次元イメージングにおける歪みの低減をサポートするための方法であって、前記3次元イメージングが、カメラ(530)と、撮像されることになる物体(520)の照射を提供するための光源(510)とを備えるイメージングシステム(500;700;800)によって行われ、前記照射が、前記光三角測量に使用される構造化光(511)を含み、前記カメラ(530)が、イメージング中の前記カメラ(530)が前記光三角測量の一部として前記物体(520)から反射された構造化光(511)を画像に取得するように前記提供される構造化光(511)に対して配置され、それによって前記光三角測量に従って、前記画像に取得された反射された構造化光の位置が、前記構造化光(511)が前記物体(520)によって反射された実世界位置にマッピングし、前記構造化光(511)が、前記物体(520)を含む仮想ボリューム(524)であって、前記イメージングシステムが撮像するように構成される、前記物体(520)を含む、1つまたは複数の物体が前記イメージング中に存在するボリュームに相当する、仮想ボリューム(524)と交差し、前記方法が、
少なくとも前記カメラ(530)による前記イメージング中に、前記光源(510)からの迷光(415)が前記カメラ(530)の視野(532)内で前記仮想ボリューム(524)に達するのを防止するステップを含む、方法。
【請求項10】
前記迷光を防止するステップが、前記光源(510)と前記仮想ボリューム(524)との間で前記構造化光(511)の外側に配置される遮光体(550;750;850)によって前記迷光を遮断することによって達成される、請求項9に記載の方法。
発明の詳細な説明
【技術分野】
【0001】
本明細書における実施形態は、光三角測量に基づく3次元イメージングのためのイメージングシステムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
ファクトリおよびロジスティックオートメーションのための産業用ビジョンカメラおよびシステムは3次元(3D)マシンビジョンに基づいてもよく、場面および/または物体の3D画像が取得される。3D画像によって、従来の画像におけるように2次元(2D)だけに画素に関する、強度および/または色のような、情報を備えるのではなく、または少なくともそれだけを備えるのではなく、「高さ」または「深さ」情報も備える画像が示される。すなわち、画像の各画素が、画素の位置と関連付けられかつ撮像されたもの、例えば物体の位置にマッピングする情報を備えてもよい。次いで、3D画像から物体の特性、すなわち物体の3D特性に関する情報を抽出し、例えば様々な3D画像フォーマットに変換するために処理が加えられてもよい。そのような高さに関する情報はレンジデータと称されてもよく、レンジデータは、したがって撮像されている物体の高さ測定からの、または言い換えれば物体のレンジもしくは距離測定からのデータに相当し得る。代替的または追加的に、画素は、例えば撮像領域における光の散乱または特定の光の波長の反射に関するような材料性質に関する情報を備えてもよい。
【0003】
それ故、画素値は、例えば画素の強度におよび/またはレンジデータにおよび/または材料性質に関してもよい。
【0004】
例えば画像データを一度に1ラインの画素ずつ感知および提供するように構成されたセンサを備えるカメラによって、画像の画像データが一度に1ラインずつスキャンまたは提供されると、ラインスキャン画像データが生じる。ラインスキャン画像の特例が、スキャンされる物体を光によって照射する「光のシート」を使用する光三角測量によって提供される画像データである。物体と交差した光のシートは、物体に投射されて反射される光ラインに至る。典型的にはレーザが使用されて、物体上でそれによってカメラに向けて反射されるレーザラインに至る。レーザがしばしば好まれ、そのため光三角測量は時にレーザ三角測量と称されるが、「光のシート」、すなわち光平面を提供することができる他の光源、または他の構造化光も使用できる。すなわち、焦束されたままであり、あまり発散しない光、または言い換えれば、「構造化」されている光、例えばレーザもしくは発光ダイオード(LED)によって提供される光を提供することができる光源である。それ故、一般に、上述したような光三角測量は、照射のために構造化光を使用することに基づく。
【0005】
構造化光は、光三角測量の一部として物体に照射するための光の定義された、典型的には既定の、パターンに相当する。しばしば、上に示したように、物体表面に照射すると、物体表面に投射されて反射されてカメラによって撮像される光ラインに至る、光平面の形態の構造化光である。構造化光の他の例には、より大きな領域にわたって提供される照射の光エッジを含み、物体に照射する厚い光ラインに相当すると考えることができ、物体に投射された光エッジは光平面の場合における光ラインに対応し、それとして対応して使用されてもよい。また光三角測量において物体の照射のために、例えば物体表面に投射されて反射されるライン、ドット、グリッド、バー等に至る、他の構造化光が使用されてもよい。
【0006】
いずれの場合も、構造化光の構造は、例えば構造化光が光平面に相当すれば光平面において、物体表面上の反射が発生した実世界位置を識別し、これらの位置を、光、例えば反射光ラインが取得される、イメージセンサに、および画像にマッピングすることを可能にする。認識されるべきであるように、これが光三角測量ベースの3Dイメージングの根本原則である。
【0007】
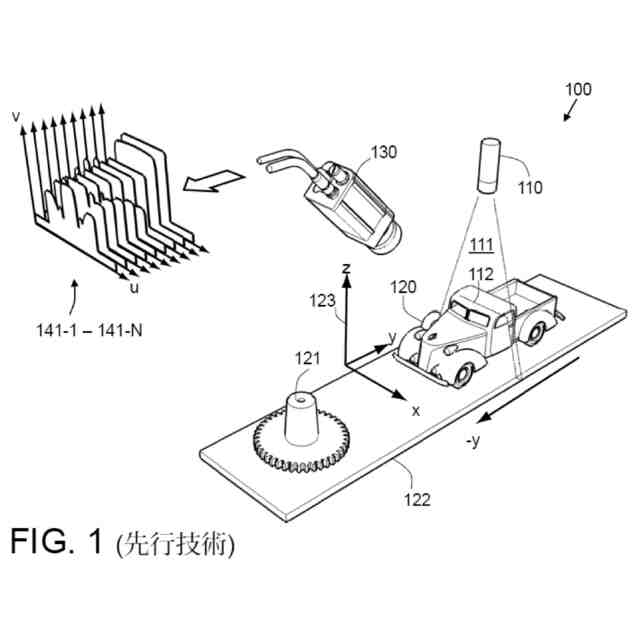
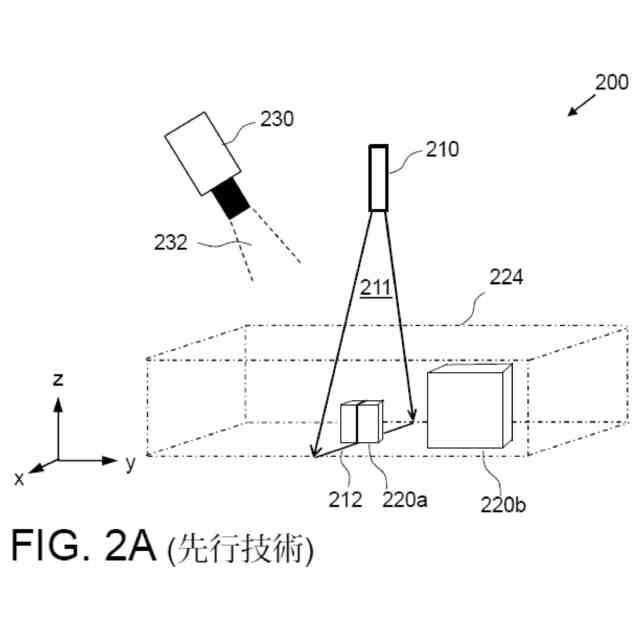
3Dマシンビジョンシステムは、しばしば以上のように光三角測量に基づく。そのようなシステムでは物体に、物体上で光ラインに至る光平面のような、構造化光を照射する光源があり、そのラインに沿って、物体のプロファイルに対応して、物体の3D特性を取得できる。そのようなラインで物体をスキャンし、物体のラインスキャンを行うことによって、ラインおよび/または物体の移動を伴えば、複数プロファイルに対応して、物体全体の3D特性を取得できる。
【0008】
典型的には、光三角測量に基づいて3D画像を生成するために、撮像されることになる物体からの反射光がカメラのイメージセンサによって取得されて、例えば物体に投射される光ラインのイメージングに至る。結果的な画像データにおいて次いで強度ピークが検出される。ピークは、イメージセンサによって取得された構造化光を反射した物体上の場所に対応する、センサ座標における、位置に発生する。構造化光が提供される実世界座標と反射された構造化光が取得されるイメージセンサ座標との間の、典型的にはイメージングシステムのセットアップ時の校正手順から既知の、マッピングにより、画像データは、反射が発生したところの物体についての上記高さ情報を含む。典型的であるが、必然ではなく、イメージングシステムは、反射光に関する強度ピークがセンサの列ごとに発生しかつ期待されるべきであり、列内の位置が高さにマッピングするようにセットアップされる。
【0009】
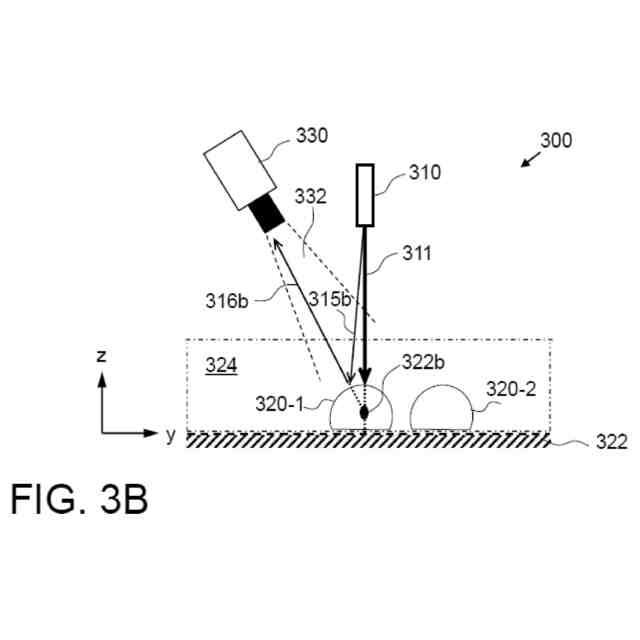
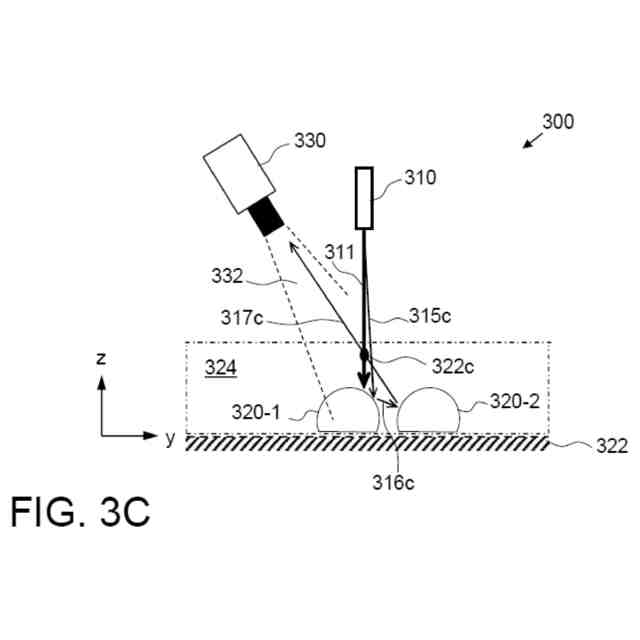
以上から、光三角測量それ自体から生じる強度ピーク以外の画像データにおける強度ピークが問題を引き起こすことがあり、それらが発生すれば、少なくとも光三角測量それ自体に属する強度ピークとしては検出および/または使用されないべきであることが認められる。また、イメージセンサ画素を飽和させる強すぎる強度ピークが問題を引き起こし、望ましい解像度でピークを検出することを困難にすることがある。上述したような不要な強度ピークからの結果が、結果的なプロファイル画像における更には複数プロファイル画像から形成される結果的な完全な3D画像におけるアーチファクト、例えば3D画像における「スパイク」の形態のアーチファクトになり得る。
【0010】
不要な強度ピークは、例えば構造化光による2次反射および/または非常に強い鏡面反射によって引き起こされることがあり、それらは、先行技術では典型的には解決策「画像感知後」によって、すなわち、例えば強度ピーク検出アルゴリズムの前にまたはその一部として結果的な画像データを処理することによって、緩和される。課題は、構造化光による物体表面上の正反射から生じる、光三角測量のために「必要な」強度ピークだけを発見および/もしくは識別する、ならびに/または構造化光による2次反射によって引き起こされる強度ピークのような、光三角測量のために不要な強度ピークを使用しないこともしくは使用することを回避することである。不要な強度ピークが必要なものとして、すなわち「あたかもそれが光三角測量のために必要なものであるかのように」使用されれば、物体の正しい3Dイメージングに至ることはできないことが認められる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
集束超音波の測定機
12日前
個人
センサ制御回路
12日前
甲神電機株式会社
電流センサ
5日前
甲神電機株式会社
電流検出器
5日前
株式会社大真空
センサ
今日
甲神電機株式会社
漏電検出器
5日前
株式会社大真空
センサ
16日前
日本精機株式会社
車両用計器
19日前
株式会社高橋型精
採尿具
6日前
ダイトロン株式会社
外観検査装置
12日前
株式会社トプコン
測量装置
5日前
株式会社トプコン
測量装置
19日前
アズビル株式会社
漏液センサ
16日前
株式会社諸岡
自動運転作業機
16日前
アズビル株式会社
熱式流量計
6日前
学校法人東京電機大学
干渉計
13日前
株式会社国際電気
治具セット
19日前
シャープ株式会社
収納装置
6日前
豊田合成株式会社
表示装置
5日前
株式会社ミトミ技研
圧力測定装置
12日前
TDK株式会社
磁気センサ
12日前
日本特殊陶業株式会社
ガスセンサ
6日前
株式会社ジェイテクト
荷重付与装置
19日前
エスペック株式会社
試験装置
13日前
理研計器株式会社
ガス検知器
16日前
株式会社JVCケンウッド
撮像装置
13日前
トヨタ自動車株式会社
画像検査装置
今日
アズビル株式会社
真空計測システム
16日前
個人
電気計器用結線器
16日前
株式会社東京久栄
水中移動体用採水器
6日前
株式会社ミツトヨ
目盛板姿勢検査方法
19日前
アズビル株式会社
ヒータ温度推定装置
13日前
エスペック株式会社
二次電池用プローブ
19日前
ローム株式会社
MEMSデバイス
6日前
横河電機株式会社
光源装置
6日前
TDK株式会社
温度センサ
6日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ