TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024180281
公報種別
公開特許公報(A)
公開日
2024-12-26
出願番号
2024064338
出願日
2024-04-12
発明の名称
対象物の位置を推定する方法、プログラム、および、対象物位置推定装置
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
G01S
13/931 20200101AFI20241219BHJP(測定;試験)
要約
【課題】対象物の位置の変更の影響を受けない、対象物の検知の技術の提供。
【解決手段】周波数と強度が表された分布である周波数分布を、連続する二回の送信波の分得る第1周波数処理工程と、ミリ波レーダ10の位置を基準とする距離と速度の組み合わせのセルに対して強度が表された分布である強度分布を得る工程と、強度分布において予め定められた閾値よりも大きい強度を有する一つ以上のセルを抽出し一つ以上の測距点APFを生成する第1検出工程と、測距点が属する対象物の種別を予測する予測工程と、対象領域TAにおいて変更閾値を設定する閾値変更工程と、対象領域において変更閾値よりも大きい強度が表された複数のセルを抽出し、複数のセルに基づいてミリ波レーダの位置を基準とする位置が表された複数の測距点を生成する第2検出工程と、ミリ波レーダの位置を基準とした対象物の位置を推定する対象物位置推定工程とを備える。
【選択図】図9
特許請求の範囲
【請求項1】
対象物の位置を推定する方法であって、
ミリ波レーダ(10)から変調された送信波(TW)を送信し、前記送信波が対象物に反射して生じる反射波(RW)を受信して得られた信号に基づいて得られるデジタル信号をFFTすることで、周波数と強度が表された分布である周波数分布を、連続する少なくとも二回の前記送信波の分得る、第1周波数処理工程と、
前記連続する少なくとも二回の前記送信波に対応する少なくとも二つの周波数分布に対してドップラーFFTすることで、前記ミリ波レーダの位置を基準とする距離と速度の組み合わせのセルに対して、強度が表された分布である強度分布を得る第2周波数処理工程と、
前記強度分布において、予め定められた閾値よりも大きい強度を有する一つ以上のセルを抽出し、前記セルに基づいて、前記ミリ波レーダの位置を基準とする位置が表された一つ以上の測距点(APF)を生成する第1検出工程と、
画像生成装置(20)によって取得された、前記対象物を含む画像データに基づいて、前記測距点が属する対象物の種別を予測する予測工程と、
抽出された前記セルのそれぞれについて、前記強度分布の前記セルを包含する前記予測された前記対象物の種別に基づいて定められる範囲を有する対象領域(TA)において、変更閾値を設定する閾値変更工程と、
前記対象領域において、前記変更閾値よりも大きい強度が表された複数のセルを抽出し、前記複数のセルに基づいて、前記ミリ波レーダの位置を基準とする位置が表された複数の測距点を生成する第2検出工程と、
前記複数の測距点に基づいて、前記ミリ波レーダの位置を基準とした前記対象物の位置を推定する対象物位置推定工程と、を備える、対象物の位置を推定する方法。
続きを表示(約 2,000 文字)
【請求項2】
請求項1に記載の対象物の位置を推定する方法であって、
前記対象物位置推定工程において、さらに、推定された前記対象物の位置、および画像生成装置によって取得された前記対象物を含む画像データに基づいて、前記対象物の大きさ、種別、向き、および速度と、のうち、一つ以上を推定し、
さらに、前記推定した情報を記憶装置(300)が記憶する工程を備える、対象物の位置を推定する方法。
【請求項3】
請求項1に記載の対象物の位置を推定する方法であって、
前記第1検出工程において、
前記強度分布に対して、一定誤警報確率処理を行って、予め定められた閾値よりも大きい強度を有する前記セルを抽出する、対象物の位置を推定する方法。
【請求項4】
請求項2に記載の対象物の位置を推定する方法であって、
前記対象物位置推定工程において、少なくとも前記対象物の種別が推測され、
一回目の前記予測工程において、
前記測距点の前記ミリ波レーダの位置を基準とする位置と、前記画像データと、に基づいて、前記対象物の種別を予測し、
二回目以降の前記予測工程において、
前記測距点の前記ミリ波レーダの位置を基準とする位置と、前回の処理において推定された前記対象物の位置と、が予め定められた距離よりも近い位置にいる場合に、前回の処理において推定された前記対象物の種別を、前記測距点が属する前記対象物の種別であると予測し、
前記測距点の前記ミリ波レーダの位置を基準とする位置と、前回の処理において推定された前記対象物の位置と、が予め定められた距離よりも近い位置にいない場合に、処理を終了する、対象物の位置を推定する方法。
【請求項5】
請求項1に記載の対象物の位置を推定する方法であって、
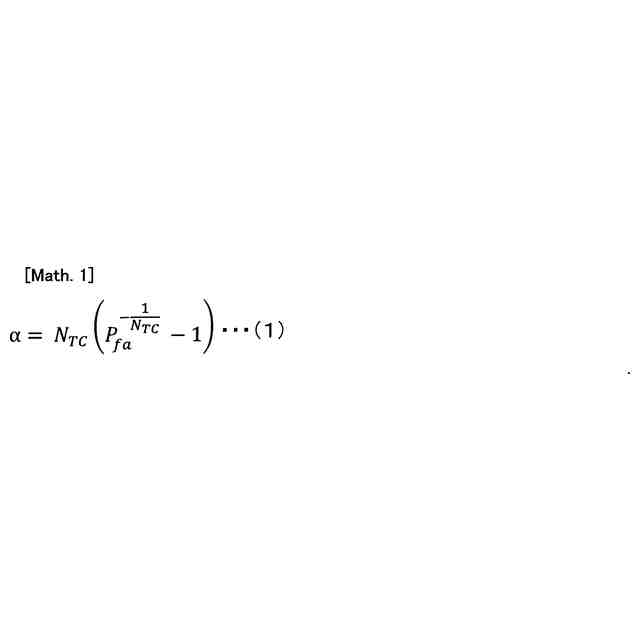
前記閾値変更工程において、
TIFF
2024180281000008.tif
27
170
の式に従って求められる前記反射波の電力の強度を、前記変更閾値として算出し、
式で用いるレーダ反射断面積は、前記対象物の種別に応じて予め定められた値に対して変更された値であり、
前記変更された値は、
前記対象物が車両の場合、-5dBsmから+5dBsmの範囲内の値であり、
前記対象物が生物の場合、-15dBsmから-5dBsmの範囲内の値である、対象物の位置を推定する方法。
【請求項6】
請求項1に記載の対象物の位置を推定する方法であって、
前記第2検出工程において生成された前記複数の測距点のそれぞれの、前記ミリ波レーダを基準とする位置と、速度と、前記反射波の受信電力の強度と、の情報のうち、一つ以上を、記憶部(141)が記憶する、対象物の位置を推定する方法。
【請求項7】
請求項1に記載の対象物の位置を推定する方法であって、
前記第2検出工程において、
前記複数の測距点からなる測距点群(RPC)の、前記ミリ波レーダを基準とする三次元における位置と、向きと、大きさと、速度と、のうち、一つ以上を演算する、対象物の位置を推定する方法。
【請求項8】
請求項1に記載の対象物の位置を推定する方法であって、
前記対象物位置推定工程において、
クラスタリングと、トラッキング処理と、HOGと、SIFTと、のいずれか、または2以上の組み合わせのアルゴリズム、または、機械学習によるアルゴリズムを用いる、対象物の位置を推定する方法。
【請求項9】
請求項1に記載の対象物の位置を推定する方法であって、
前記予測工程の実行後に実行される工程であって、
前記ミリ波レーダおよび前記画像生成装置についてあらかじめ決められた検出方向において、前記ミリ波レーダおよび前記画像生成装置が搭載された移動体が走行する路面の傾斜を表す傾斜情報を取得する傾斜取得工程と、
前記傾斜情報と、前記路面の前記傾斜の角度と前記反射波の強度との対応付けを予め定義した定義テーブル(Tbl)または関数と、を用いて、前記検出方向における距離ごとに、前記路面の前記傾斜が考慮された補正量(σ2)を取得する補正量取得工程と、
前記閾値変更工程において、前記補正量を用いて前記変更閾値を設定する、前記対象物の位置を推定する方法。
【請求項10】
請求項9に記載の対象物の位置を推定する方法であって、
前記傾斜取得工程において、前記一つ以上の測距点と、前記画像生成装置によって取得された前記画像データとの少なくとも一方を用いて前記傾斜情報を取得する、対象物の位置を推定する方法。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、対象物の位置を推定する方法、プログラム、および対象物位置推定装置に関する。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
特許文献1において、FMCW(Frequency Modulated Continuous Wave)レーダ装置を用いて物標の検知を行うとともに、カメラを用いて、物標の種別や、材質や、大きさ等の属性情報を求めることで、物標の識別を行う物標識別方法が開示されている。この物標識別方法において、カメラを用いて取得された、処理の前サイクルにおける物標の位置や属性の情報をもとに、今サイクルにおける物標の位置が前サイクルの物標の位置と一致するかが判断される。一致した場合、今サイクルの測定でピークが存在すると考えらえる周波数である予測周波数を求める。そして、予測周波数付近の周波数成分の抽出しきい値を、属性に基づいて変更する。
【0003】
物標が車両である場合、車両からの反射波に基づくピークが検出されることが予測される周波数領域では、抽出しきい値が高く設定される。これにより、ノイズにより生じた抽出する必要のないピークを抽出することを防止することができる。物標が非車両である場合、非車両からの反射波に基づくピークが検出されることが予測される周波数領域では、抽出しきい値が低く設定される。反射波の信号強度が小さくても、抽出すべきピークを確実に抽出することができる。
【先行技術文献】
【特許文献】
【0004】
特開2004-191131号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1においては、前サイクルの認識物標の位置と、対象物標情報から特定される物標の位置とが一致しなければ、処理が終了される。そのため、物標の位置の変更の影響を受けない物標の検知が求められる。
【課題を解決するための手段】
【0006】
本開示は、以下の形態として実現することが可能である。
【0007】
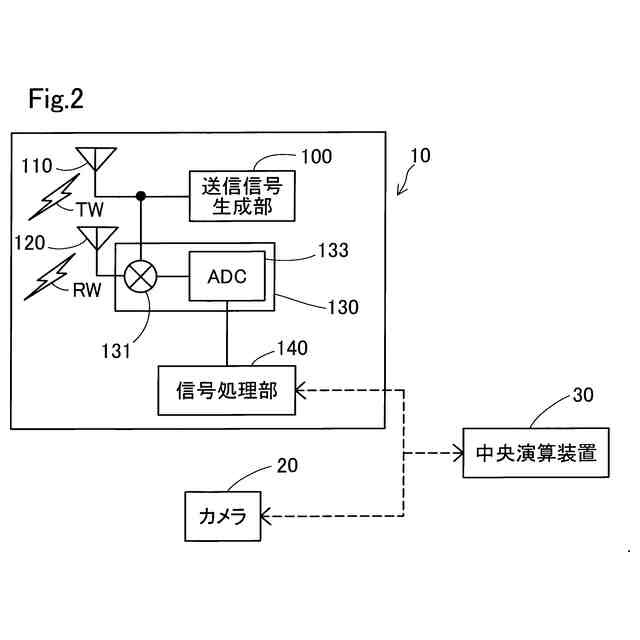
本開示の一形態によれば対象物の位置を推定する方法が提供される。この対象物の位置を推定する方法において、ミリ波レーダ(10)から変調された送信波(TW)を送信し、前記送信波が対象物に反射して生じる反射波(RW)を受信して得られた信号に基づいて得られるデジタル信号をFFTすることで、周波数と強度が表された分布である周波数分布を、連続する少なくとも二回の前記送信波の分得る、第1周波数処理工程と、前記連続する少なくとも二回の前記送信波に対応する少なくとも二つの周波数分布に対してドップラーFFTすることで、前記ミリ波レーダの位置を基準とする距離と速度の組み合わせのセルに対して、強度が表された分布である強度分布を得る第2周波数処理工程と、前記強度分布において、予め定められた閾値よりも大きい強度を有する一つ以上のセルを抽出し、前記セルに基づいて、前記ミリ波レーダの位置を基準とする位置が表された一つ以上の測距点(APF)を生成する第1検出工程と、画像生成装置(20)によって取得された、前記対象物を含む画像データに基づいて、前記測距点が属する対象物の種別を予測する予測工程と、抽出された前記セルのそれぞれについて、前記強度分布の前記セルを包含する前記予測された前記対象物の種別に基づいて定められる範囲を有する対象領域(TA)において、変更閾値を設定する閾値変更工程と、前記対象領域において、前記変更閾値よりも大きい強度が表された複数のセルを抽出し、前記複数のセルに基づいて、前記ミリ波レーダの位置を基準とする位置が表された複数の測距点を生成する第2検出工程と、前記複数の測距点に基づいて、前記ミリ波レーダの位置を基準とした前記対象物の位置を推定する対象物位置推定工程と、を備える。
【0008】
この形態の対象物の位置を推定する方法によれば、予測される対象物の種別に基づいて定められる範囲を有する対象領域TAにおいて、変更閾値が設定されるため、予測される対象物の位置に基づいて変更閾値が設定される態様と比較して正確に対象物の位置を推定することができる。また、対象物の大きさと、種別と、向きと、速度と、のうち一つ以上が推定されることで、それらが推定されない態様と比較して、対象物の位置を正確に推定することができる。
【0009】
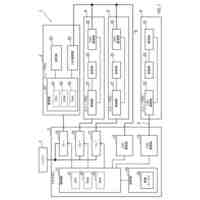
本開示の他の形態によれば、対象物位置推定装置が提供される。この対象物位置推定装置において、変調された送信波を送信するミリ波レーダであって、前記送信波が対象物に反射して生じる反射波を受信して得られた信号に基づいて得られるデジタル信号をFFTすることで、周波数と強度が表された分布である周波数分布を、連続する少なくとも二回の前記送信波の分、得る演算処理部(143)であって、前記連続する少なくとも二回の前記送信波に対応する少なくとも二つの周波数分布に対してドップラーFFTすることで、前記ミリ波レーダの位置を基準とする距離と速度の組み合わせのセルに対して、強度が表された分布である強度分布を得る、演算処理部と、前記強度分布において予め定められた閾値よりも大きい強度を有する前記セルに基づいて、前記ミリ波レーダの位置を基準とする位置が表された一つ以上の測距点を生成する第1検出部(146a)と、画像生成装置によって取得された、前記対象物を含む画像データに基づいて、前記測距点が属する対象物の種別を予測する予測部(146b)と、抽出された前記セルのそれぞれについて、前記強度分布において、前記セルを包含する、前記予測された前記対象物の種別に基づいて定められる範囲を有する対象領域(TA)において、変更閾値を設定する閾値変更部(146c)と、前記対象領域において、前記変更閾値よりも大きい強度が表された複数のセルを抽出し、前記複数のセルに基づいて、前記ミリ波レーダの位置を基準とする位置が表された複数の測距点を生成する第2検出部(146d)と、前記複数の測距点に基づいて、前記ミリ波レーダの位置を基準とした前記対象物の位置を推定する位置推定部(331)と、を備える。
【図面の簡単な説明】
【0010】
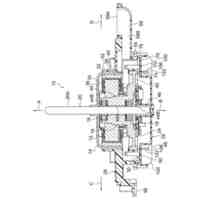
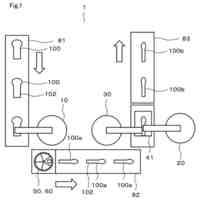
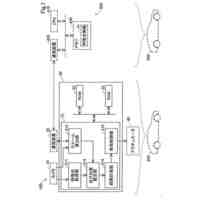
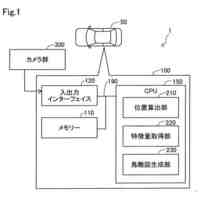
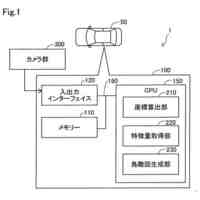
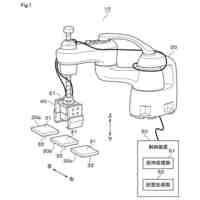
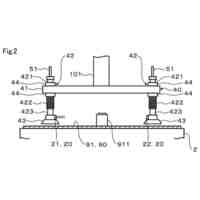
第1実施形態の対象物位置推定装置が搭載される車両を示した図。
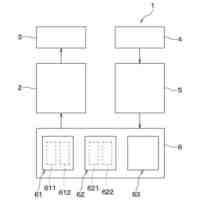
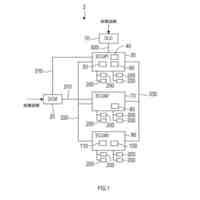
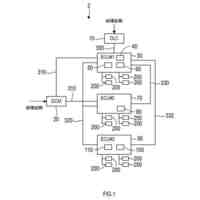
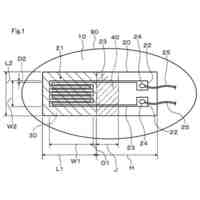
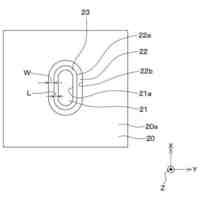
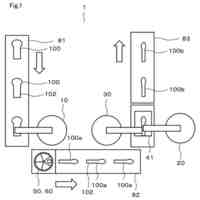
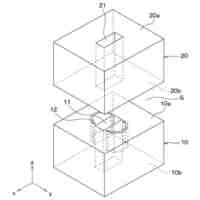
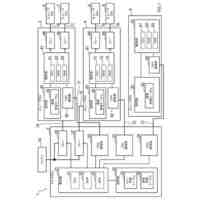
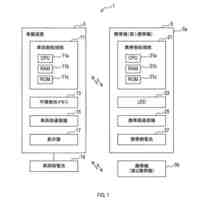
対象物位置推定装置を説明する図。
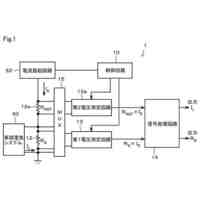
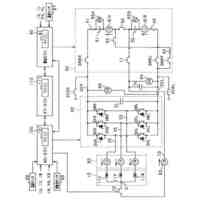
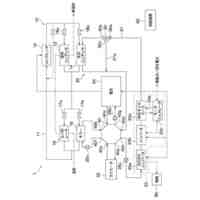
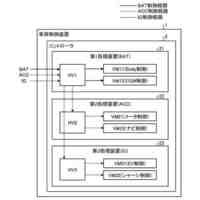
信号処理部と中央演算装置を説明するブロック図。
強度分布の一例を説明する図。
二次元の一定誤警報確率処理を説明する図。
一定誤警報確率処理により抽出されたセルを表した図。
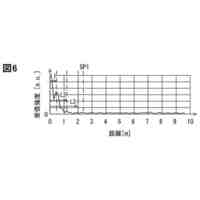
図4の強度分布の、ミリ波レーダを基準とする速度が0Km/hの、各セルの距離と強度と、を表した分布。
変更閾値が設定されることにより抽出されたセルを説明する図。
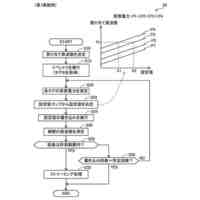
対象物の位置を推定する方法の一例を示すフローチャート。
ミリ波レーダを基準とする測距点の位置を表した図。
変更閾値の設定により抽出されたセルを表した図。
第2検出工程により生成された複数の測距点からなる測距点群を表した図。
物標までの距離に応じた反射波の受信電力を物標の種別ごとに表す説明図。
車両および傾斜が-15度の路面それぞれの反射波の受信電力の分布を示す説明図。
路面の傾斜に応じたレーダ反射断面積の変化を示す説明図。
定義テーブルの一例を示す説明図。
レーダ反射断面積σ2の決定方法についての説明図。
レーダ反射断面積σ2の決定方法についての説明図。
第2実施形態にかかる対象物の位置を推定する方法の一例を示すフローチャート。
設定された変更域値を示す説明図。
第2実施形態における変更域値の設定方法の利点を説明する図。
路面の傾斜を考慮することのメリットについての説明図。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
今日
株式会社デンソー
回転電機
1日前
株式会社デンソー
レーダ装置
今日
株式会社デンソー
通信システム
1日前
株式会社デンソー
通信システム
2日前
株式会社デンソー
通信システム
1日前
株式会社デンソーウェーブ
タグ通信装置
1日前
株式会社デンソー
路面摩擦推定装置
1日前
株式会社デンソーウェーブ
ロボットシステム
2日前
株式会社デンソー
自己位置推定装置
3日前
株式会社デンソーウェーブ
歪ゲージの取付方法
1日前
株式会社デンソーウェーブ
データ配信システム
今日
株式会社デンソーウェーブ
移動体追跡システム
3日前
株式会社デンソー
シャント式電流センサ
2日前
株式会社デンソートリム
エンジン電子制御装置
1日前
株式会社デンソーテン
充電制御装置、充電制御方法
2日前
株式会社SOKEN
導波管
6日前
株式会社デンソー
電力変換装置及びプログラム
6日前
株式会社デンソー
推定装置、および、推定方法
今日
株式会社デンソー
推定装置、および、推定方法
今日
株式会社デンソー
内燃機関用のスパークプラグ
今日
株式会社デンソーウェーブ
ロボットシステム、及び分割器
2日前
株式会社SOKEN
伝送装置
1日前
株式会社SOKEN
温調装置
1日前
株式会社デンソーテン
車両制御装置および車両制御方法
今日
株式会社デンソー
通信システムおよび給電切替装置
1日前
株式会社デンソーウェーブ
段積みシステムおよび段積み方法
2日前
株式会社デンソーテン
漏電検出装置および漏電検出方法
2日前
株式会社デンソーテン
音響処理装置および音響処理方法
3日前
株式会社デンソーウェーブ
ロボットへの振動工具の取付装置
2日前
株式会社デンソー
スイッチング素子とその製造方法
1日前
株式会社SOKEN
生体検出装置
3日前
株式会社デンソーテン
人流予測方法、装置及びプログラム
今日
株式会社SOKEN
物体検知装置
6日前
株式会社デンソー
電池管理システム及び電池管理方法
今日
株式会社デンソーウェーブ
ロボットシステム、及び折り畳み方法
3日前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ