TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025059138
公報種別
公開特許公報(A)
公開日
2025-04-10
出願番号
2023168953
出願日
2023-09-29
発明の名称
推定装置、および、推定方法
出願人
株式会社デンソー
,
トヨタ自動車株式会社
,
株式会社ミライズテクノロジーズ
代理人
弁理士法人明成国際特許事務所
主分類
H04N
7/18 20060101AFI20250403BHJP(電気通信技術)
要約
【課題】3次元空間情報の推定について、より信頼性が高い推定結果を得る。
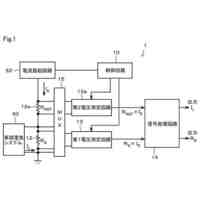
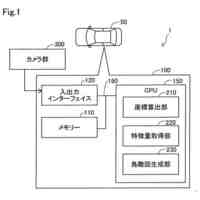
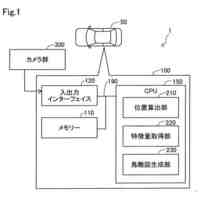
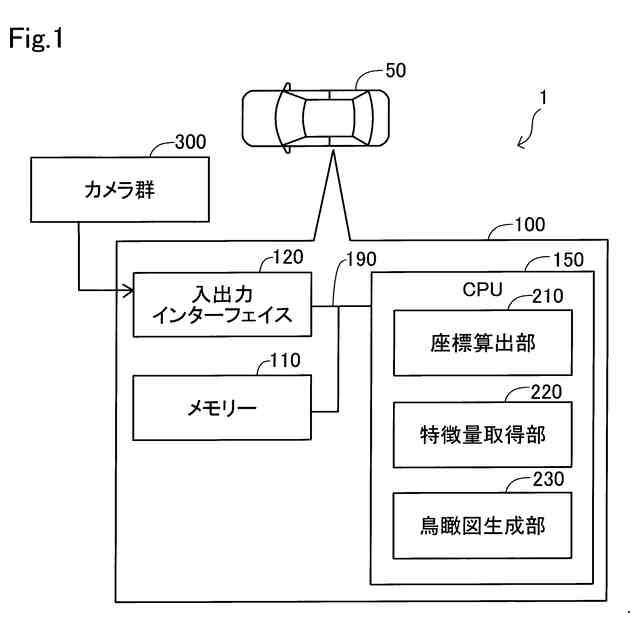
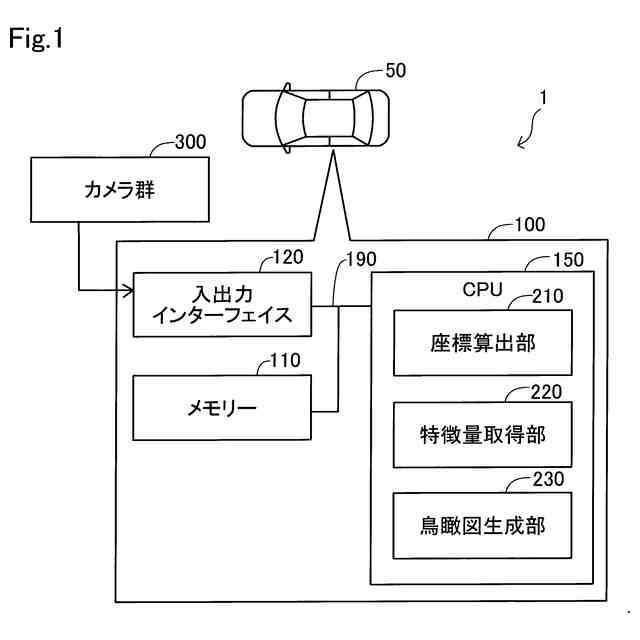
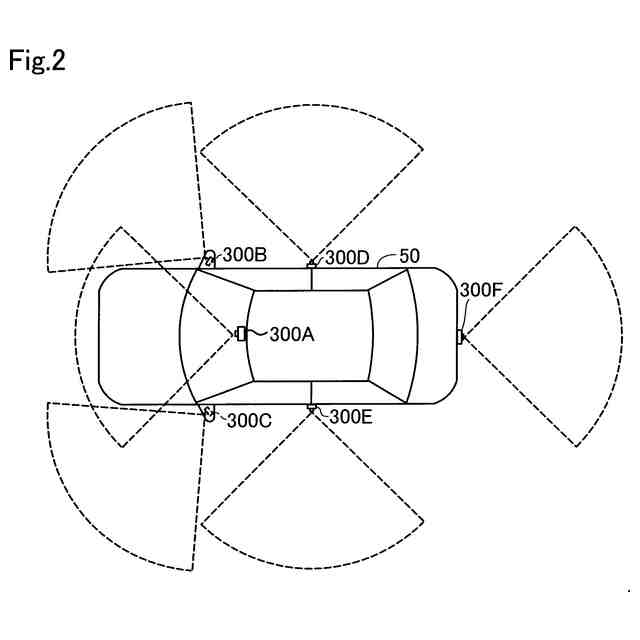
【解決手段】推定装置100は、同一のカメラにより撮像された時系列で連続した2次元画像に基づいて、自己位置推定手法としてのVisual Odometryを用いて、2次元画像内の物体の3次元座標を算出する座標算出部であって、車両500に備えられた複数のカメラ300A~300Fにより車両の外部が撮像された2次元画像それぞれに基づいて、車両の周囲に存在する物体の3次元座標を算出する座標算出部210と、BEV空間における特徴量であるBEV特徴量を取得するBEV推定のためのアルゴリズムにより、3次元座標と、車両の外部が撮像された2次元画像とに基づいて、BEV特徴量を取得する特徴量取得部220と、BEV特徴量に基づいて車両を上方から見た様子を表す画像である鳥瞰図を生成する鳥瞰図生成部230と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
推定装置(100)であって、
同一のカメラにより撮像された時系列で連続した2次元画像に基づいて、自己位置推定手法としてのVisual Odometryを用いて、前記2次元画像内の物体の3次元座標を算出する座標算出部であって、車両(500)に備えられた複数のカメラ(300A~300F)により前記車両の外部が撮像された前記2次元画像それぞれに基づいて、前記車両の周囲に存在する物体の前記3次元座標を算出する座標算出部(210)と、
BEV(Bird eye view)空間における特徴量であるBEV特徴量を取得するBEV推定のためのアルゴリズムにより、前記3次元座標と、前記車両の外部が撮像された前記2次元画像とに基づいて、前記BEV特徴量を取得する特徴量取得部(220)と、
前記BEV特徴量に基づいて前記車両を上方から見た様子を表す画像である鳥瞰図を生成する鳥瞰図生成部(230)と、
を備える、
推定装置。
続きを表示(約 1,900 文字)
【請求項2】
請求項1に記載の推定装置であって、
前記特徴量取得部は、
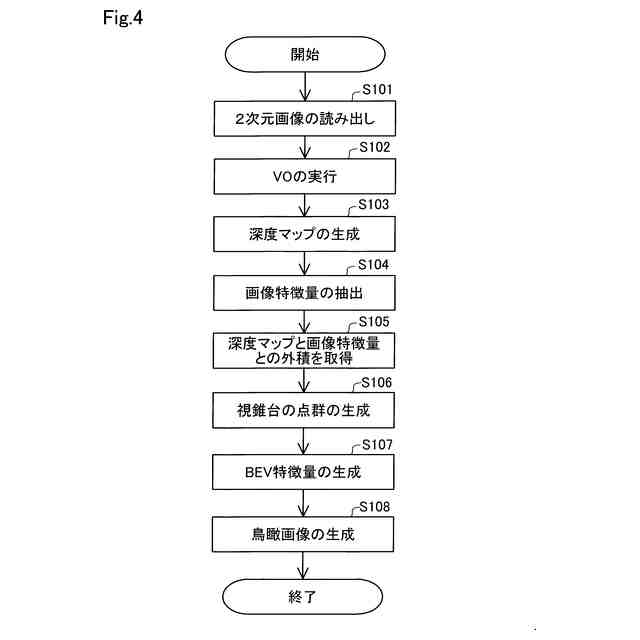
前記3次元座標を用いて、前記3次元座標の算出に用いられた前記2次元画像それぞれの深度マップを生成し、
複数の機械学習モデルであって、前記複数のカメラのうち一つのカメラにより撮像された前記2次元画像を入力として、前記一つのカメラにより撮像された前記2次元画像の特徴量である画像特徴量を出力するようにそれぞれ学習させた複数の機械学習モデルに、それぞれ対応するカメラにより撮像された前記2次元画像を入力して、前記複数の機械学習モデルがそれぞれ出力した前記画像特徴量を取得し、
前記2次元画像の前記画像特徴量と、前記2次元画像に対応する前記深度マップと、を用いて、前記複数のカメラがそれぞれ撮像した前記2次元画像の視錐台の点群(frustum-shaped point cloud)を生成し、
前記視錐台の点群に基づいて前記BEV特徴量を生成する、
推定装置。
【請求項3】
請求項2に記載の推定装置であって、
前記自己位置推定手法としてVisual Inertial Odometryを用いる、
推定装置。
【請求項4】
請求項3に記載の推定装置であって、
前記自己位置推定手法として、さらに、車輪速センサによる検出値を用いる、
推定装置。
【請求項5】
請求項1に記載の推定装置であって、
前記特徴量取得部は、
前記3次元座標を用いて、前記3次元座標の算出に用いられた前記2次元画像それぞれの深度マップを生成し、
前記2次元画像と、前記2次元画像に対応する前記深度マップを融合してRGB-Dデータを生成し、
複数の機械学習モデルであって、前記複数のカメラのうち一つのカメラにより撮像された前記2次元画像に基づいて生成された前記RGB-Dデータを入力として、前記一つのカメラにより撮像された前記RGB-Dデータの特徴量であるRGB-Dデータ特徴量を出力するようにそれぞれ学習させた複数の機械学習モデルに、それぞれ対応するカメラにより撮像された前記2次元画像に基づいて生成された前記RGB-Dデータを入力して、前記複数の機械学習モデルがそれぞれ出力した前記RGB-Dデータ特徴量を取得し、
前記RGB-Dデータ特徴量に基づいて前記BEV特徴量を生成する、
推定装置。
【請求項6】
請求項5に記載の推定装置であって、
前記自己位置推定手法としてVisual Inertial Odometryを用いる、
推定装置。
【請求項7】
請求項6に記載の推定装置であって、
前記自己位置推定手法として、さらに、車輪速センサによる検出値を用いる、
推定装置。
【請求項8】
請求項1に記載の推定装置であって、
前記特徴量取得部は、
複数の機械学習モデルであって、前記複数のカメラのうち一つのカメラにより撮像された前記2次元画像を入力として、前記一つのカメラにより撮像された前記2次元画像の特徴量である画像特徴量を出力するようにそれぞれ学習させた複数の機械学習モデルに、それぞれ対応するカメラにより撮像された前記2次元画像を入力して、前記複数の機械学習モデルがそれぞれ出力した前記画像特徴量を取得し、
前記画像特徴量に基づいて前記BEV空間における特徴量である第1BEV特徴量を生成し、
前記3次元座標を入力として、前記3次元座標の特徴量である3次元特徴量を出力するように学習させた第2機械学習モデルに、前記3次元座標を入力して、前記第2機械学習モデルが出力した前記3次元特徴量を取得し、
前記3次元特徴量に基づいて前記BEV空間における特徴量である第2BEV特徴量を生成し、
、
前記鳥瞰図生成部は、前記第1BEV特徴量と前記第2BEV特徴量とを融合した融合特徴量に基づいて前記鳥瞰図を生成する、
推定装置。
【請求項9】
請求項8に記載の推定装置であって、
前記自己位置推定手法としてVisual Inertial Odometryを用いる、
推定装置。
【請求項10】
請求項9に記載の推定装置であって、
前記自己位置推定手法として、さらに、車輪速センサによる検出値を用いる、
推定装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、推定装置、および、推定方法に関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特許文献1に記載の技術においては、複数のカメラにより取得された2次元画像に基づいて機械学習モデルを用いて3次元空間情報を推定し、推定した3次元空間情報に基づいて鳥瞰図を生成する。
【先行技術文献】
【特許文献】
【0003】
米国特許出願公開第2021/0398338号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
機械学習モデルを用いて、2次元画像に基づいて3次元空間情報を推定する場合、推定結果の精度は、訓練に用いる教師データおよび機械学習モデルを訓練する方法に影響される。例えば、訓練されていない事象については、機械学習モデルは正しい推定結果を出力できないことがある。機械学習モデルを用いた場合、得られた推定結果が必ずしも信頼性を有しているとはいえない。
【0005】
よって、2次元画像に基づいて3次元空間情報を推定した際に、より信頼性が高い推定結果を得ることができる技術が求められていた。
【課題を解決するための手段】
【0006】
本開示の一形態によれば、推定装置(100)が提供される。この推定装置は、同一のカメラにより撮像された時系列で連続した2次元画像に基づいて、自己位置推定手法としてのVisual Odometryを用いて、前記2次元画像内の物体の3次元座標を算出する座標算出部であって、車両(500)に備えられた複数のカメラ(300A~300F)により前記車両の外部が撮像された前記2次元画像それぞれに基づいて、前記車両の周囲に存在する物体の前記3次元座標を算出する座標算出部(210)と、BEV(Bird eye view)空間における特徴量であるBEV特徴量を取得するBEV推定のためのアルゴリズムにより、前記3次元座標と、前記車両の外部が撮像された前記2次元画像とに基づいて、前記BEV特徴量を取得する特徴量取得部(220)と、前記BEV特徴量に基づいて前記車両を上方から見た様子を表す画像である鳥瞰図を生成する鳥瞰図生成部(230)と、を備える。
【0007】
上記形態の推定装置によれば、Visual Odmetryを用いており、2次元画像、カメラの内部パラメータおよび外部パラメータに基づく幾何学的な手法により、車両の周囲の物体の3次元座標を算出するので、機械学習モデルだけを用いて車両の周囲の物体の3次元座標を推定態様にくらべて、より信頼性が高い推定結果を得ることができる。
【図面の簡単な説明】
【0008】
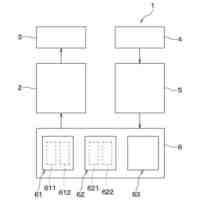
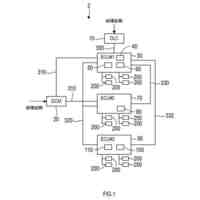
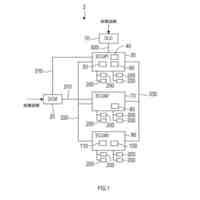
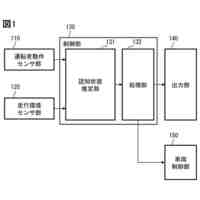
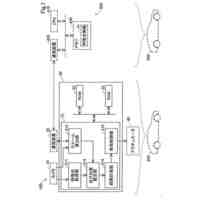
運転支援システムの概略構成を表すブロック図である。
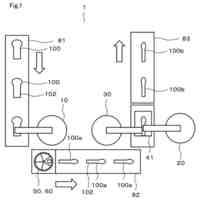
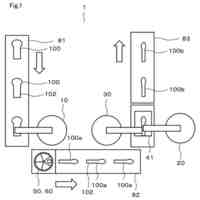
カメラの配置例を示す説明図である。
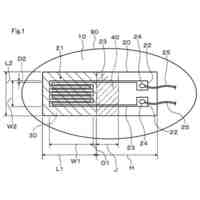
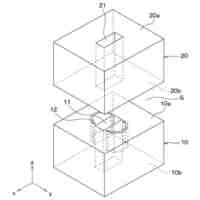
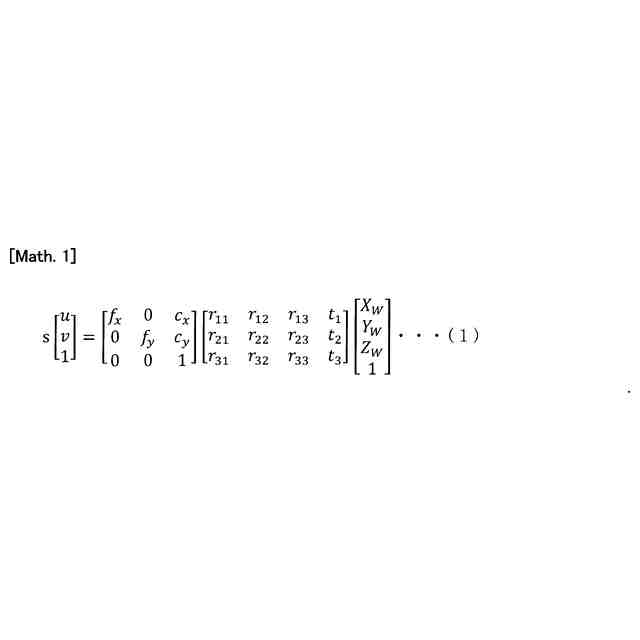
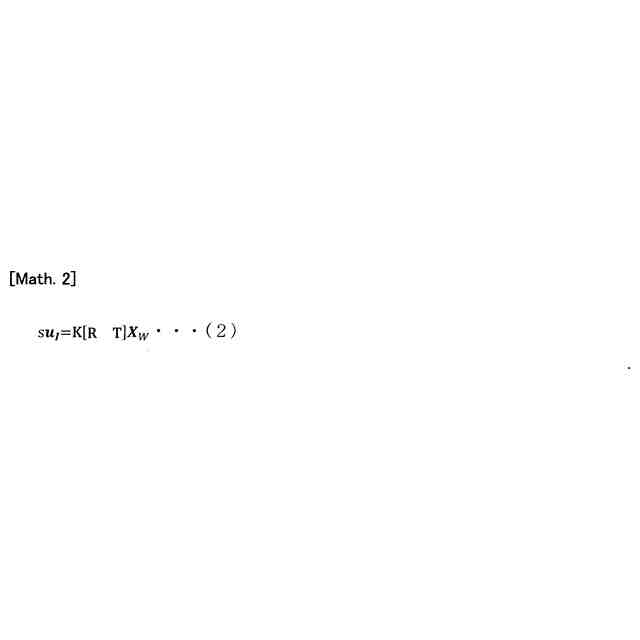
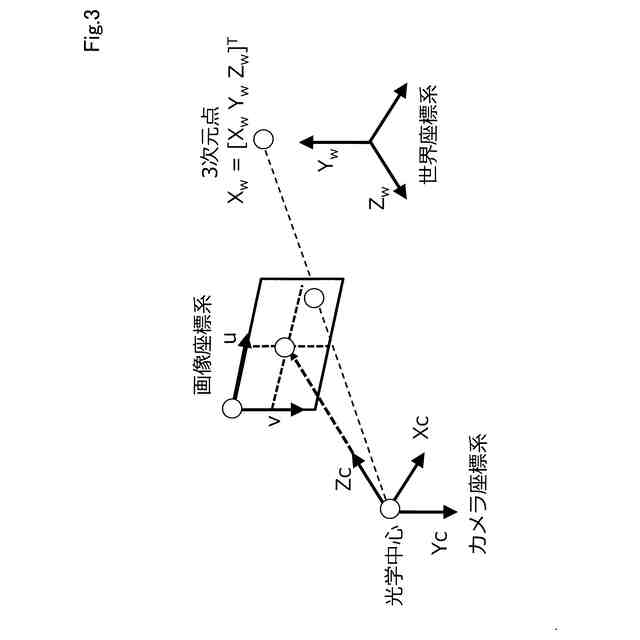
座標変換についての説明図である。
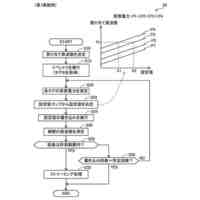
第1実施形態における鳥瞰図の生成の方法を示したフローチャートである。
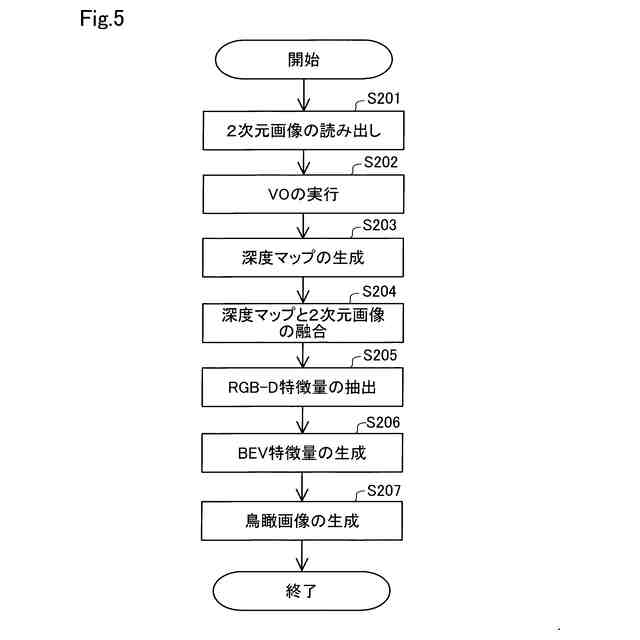
第2実施形態における鳥瞰図の生成の方法を示したフローチャートである。
第3実施形態における鳥瞰図の生成の方法を示したフローチャートである。
【発明を実施するための形態】
【0009】
A.第1実施形態:
図1に示す、運転支援システム1は、車両50に備えられた画像センサにより時系列で取得された複数の2次元画像を用いて、車両50の周囲の状況を推定し、車両50を上方から見た鳥瞰画像を生成する。鳥瞰画像は、車両50を上方から見下ろした画像である。例えば、運転支援システム1は、車両50に備えられた画像センサにより時系列で取得された複数の2次元画像を用いて、車両50を上方から見下ろした映像を車両50の車載モニターに表示する。車両50は、ADAS(Advanced Driving Assistant System: 先進運転システム)による走行が可能である。
【0010】
運転支援システム1は、推定装置100と、カメラ群300と、を備える。推定装置100とカメラ群300とは車両50に搭載されている。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社デンソー
モータ
3日前
株式会社デンソー
回転電機
4日前
株式会社デンソー
半導体装置
16日前
株式会社デンソー
レーダ装置
3日前
株式会社デンソーウェーブ
タグ通信装置
4日前
株式会社デンソー
通信システム
4日前
株式会社デンソー
通信システム
4日前
株式会社デンソー
通信システム
5日前
株式会社デンソー
情報処理方法
10日前
株式会社デンソー
運転支援装置
17日前
株式会社デンソー
アクチュエータ
16日前
株式会社デンソー
路面摩擦推定装置
4日前
株式会社デンソー
冷凍サイクル装置
11日前
株式会社デンソー
自己位置推定装置
6日前
株式会社デンソーウェーブ
ロボットシステム
5日前
株式会社デンソーウェーブ
移動体追跡システム
6日前
株式会社デンソーウェーブ
歪ゲージの取付方法
4日前
株式会社デンソーウェーブ
データ配信システム
3日前
株式会社デンソートリム
エンジン電子制御装置
4日前
株式会社デンソーウェーブ
ロボット制御システム
2日前
株式会社デンソー
シャント式電流センサ
5日前
株式会社デンソー
発光ユニット、光学センサ
16日前
株式会社デンソーテン
充電制御装置、充電制御方法
5日前
株式会社デンソーウェーブ
認証システムおよび認証方法
10日前
株式会社デンソー
電力変換装置及びプログラム
9日前
株式会社デンソー
潅水システムおよび制御装置
11日前
株式会社デンソー
無線装置、及び電源ユニット
10日前
株式会社デンソー
潅水システムおよび制御装置
11日前
株式会社SOKEN
導波管
9日前
株式会社デンソー
内燃機関用のスパークプラグ
3日前
株式会社デンソー
推定装置、および、推定方法
3日前
株式会社デンソー
推定装置、および、推定方法
3日前
株式会社SOKEN
温調装置
4日前
株式会社SOKEN
伝送装置
4日前
株式会社デンソーウェーブ
ロボットシステム、及び分割器
5日前
株式会社デンソーウェーブ
ロボットへの振動工具の取付装置
5日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ