TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024165961
公報種別
公開特許公報(A)
公開日
2024-11-28
出願番号
2023082582
出願日
2023-05-18
発明の名称
制御装置
出願人
株式会社アイエイアイ
代理人
弁理士法人太陽国際特許事務所
主分類
H02P
29/032 20160101AFI20241121BHJP(電力の発電,変換,配電)
要約
【課題】モータの種別などにかかわらずスイッチング素子の短絡を検出する。
【解決手段】制御装置は、ユニポーラ型のモータを駆動する複数のスイッチング素子のそれぞれに流れる電流を検出する電流検出部と、電流検出部が検出した電流である検出電流と比較することで過電流状態を検出する第1閾値をハードウェア構成で設定する第1閾値設定部と、第1閾値と値が異なる第2閾値をソフトウェア構成で設定する第2閾値設定部と、第2閾値と検出電流との比較結果に応じて、複数の前記スイッチング素子の短絡を検出する短絡検出部と、を備える。
【選択図】図8
特許請求の範囲
【請求項1】
ユニポーラ型のモータを駆動する複数のスイッチング素子のそれぞれに流れる電流を検出する電流検出部と、
前記電流検出部が検出した電流である検出電流と比較することで過電流状態を検出する第1閾値をハードウェア構成で設定する第1閾値設定部と、
前記第1閾値と値が異なる第2閾値をソフトウェア構成で設定する第2閾値設定部と、
前記第2閾値と前記検出電流との比較結果に応じて、複数の前記スイッチング素子の短絡を検出する短絡検出部と、
を備える制御装置。
続きを表示(約 1,100 文字)
【請求項2】
前記短絡検出部は、前記電流検出部が検出可能な電流の上限を示す上限電流と前記モータの巻線抵抗及び電源電圧に基づき前記モータに流れることが想定される電流である想定電流との何れか小さい方に設定される前記第2閾値を、前記検出電流が超えた場合、前記短絡を検出する、請求項1に記載の制御装置。
【請求項3】
前記短絡検出部は、前記第2閾値を、前記検出電流が超えた状態が特定時間継続した場合、前記短絡を検出する、請求項2に記載の制御装置。
【請求項4】
前記短絡検出部は、前記モータの駆動が禁止されている状態で、前記モータの回転速度が速度規定値以下のときに、前記モータの種別に応じて定まる定格電流に設定される前記第2閾値を、前記検出電流が超えた場合、前記短絡を検出する、請求項1に記載の制御装置。
【請求項5】
前記電流検出部は、前記モータの各相について、対応するスイッチング素子に流れる電流とその逆相の電流との差を前記検出電流として検出し、
前記短絡検出部は、前記モータの電流指令が前記モータの種別に応じて定まる電流規定値よりも大きいときに、前記モータの種別に応じて定まる定格電流から特定の値だけ低い電流に設定される前記第2閾値を、前記検出電流が下回る場合、前記短絡を検出する、請求項1に記載の制御装置。
【請求項6】
前記短絡検出部は、前記第2閾値を、前記検出電流が下回る状態が特定時間継続した場合、前記短絡を検出する、請求項5に記載の制御装置。
【請求項7】
前記モータの駆動源から前記モータに供給される電流に基づき、前記駆動源から前記モータに供給される電力である駆動源電力を推定する駆動源電力推定部と、
前記検出電流に基づき、前記モータに前記モータの駆動に使用される電力であるモータ応答電力を推定するモータ応答電力推定部と、
を備え、
前記短絡検出部は、前記駆動源電力と前記モータ応答電力との差が電力閾値以上のとき、前記短絡を検出する、請求項1に記載の制御装置。
【請求項8】
前記モータの駆動源から前記モータに供給される電流に基づき、前記駆動源から前記モータに供給される電力である駆動源電力を推定する駆動源電力推定部と、
前記モータの電流指令に基づき、前記モータの駆動に要する電力であるモータ指令電力を推定するモータ指令電力推定部と、
を備え、
前記短絡検出部は、前記駆動源電力と前記モータ指令電力との差が電力閾値以上のとき、前記短絡を検出する、請求項1に記載の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、制御装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
特許文献1は、ユニポーラ型のモータを駆動する技術を開示している。特許文献2は、モータを駆動するスイッチング素子の短絡を検出する技術を開示している。特許文献2に開示される従来技術は、電流検出部で検出した電流が所定値を超えた場合、過電流が流れたものとしてモータを停止させる(例えば特許文献2の図1参照)。
【先行技術文献】
【特許文献】
【0003】
特許第4652017号公報
特開2014-143782号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
ここで、従来技術では、電流をハードウェア構成で設定された所定値(固定値)である閾値と比較する場合がある。この場合、ユニポーラ型のモータの種別、動作状態などによっては、スイッチング素子が短絡したときに、モータコイル経由で流れる短絡電流を検出することができない場合がある。つまり、ユニポーラ型のモータでは、1つの相に対応するモータコイルに1つのスイッチング素子が接続されているため、短絡電流は、モータコイルを経由して流れることで、モータコイルの抵抗成分により比較的小さな値となるおそれがある。このような短絡電流は、モータコイルを経由せずに流れる大きな値の短絡電流が流れる回路、例えばバイポーラ型モータ用のブリッジ回路におけるスイッチング素子の短絡、又は、モータと制御装置とを接続するケーブルの短絡若しくはモータの焼損を想定して設定される閾値では、検出することができない可能性がある。またモータの種別、動作状態などによっては、検出される短絡電流の値が変わるため、閾値を小さな値に設定しただけでは、短絡が生じていないにもかかわらず、短絡を誤検出し得る。このように従来技術は、モータを駆動するスイッチング素子の短絡を検出する上で改善の余地がある。
【0005】
本発明は、上記課題に鑑みてなされたものであって、モータの種別などにかかわらずスイッチング素子の短絡を検出することができる制御装置を提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本開示の制御装置は、ユニポーラ型のモータを駆動する複数のスイッチング素子のそれぞれに流れる電流を検出する電流検出部と、前記電流検出部が検出した電流である検出電流と比較することで過電流状態を検出する第1閾値をハードウェア構成で設定する第1閾値設定部と、前記第1閾値と値が異なる第2閾値をソフトウェア構成で設定する第2閾値設定部と、前記第2閾値と前記検出電流との比較結果に応じて、前記複数のスイッチング素子の短絡の発生を検出する短絡検出部と、を備える。
【0007】
本開示によれば、モータの種別などにかかわらずスイッチング素子の短絡を検出することができる。
【図面の簡単な説明】
【0008】
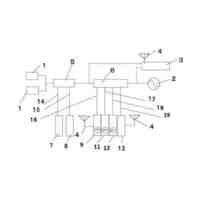
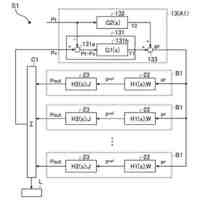
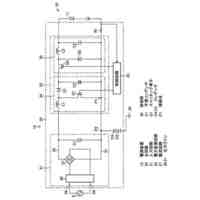
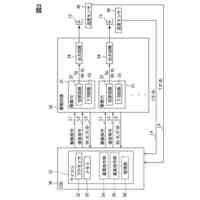
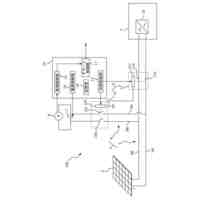
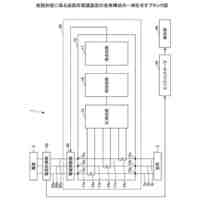
本開示の第1実施形態にかかる制御装置の構成を示す図である。
過電流検出部の構成を説明するための図である。
過電流検出部の機能を説明するための図である。
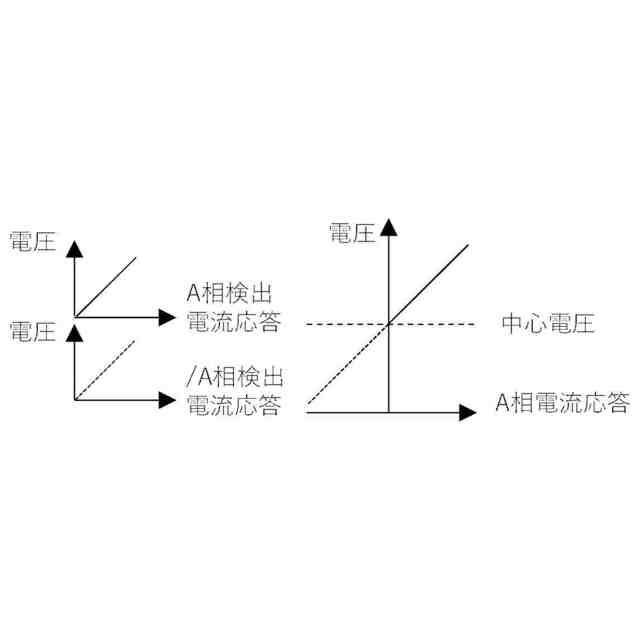
A相電流変換部の機能を説明するための図である。
A相電流変換部の構成を説明するための図である。
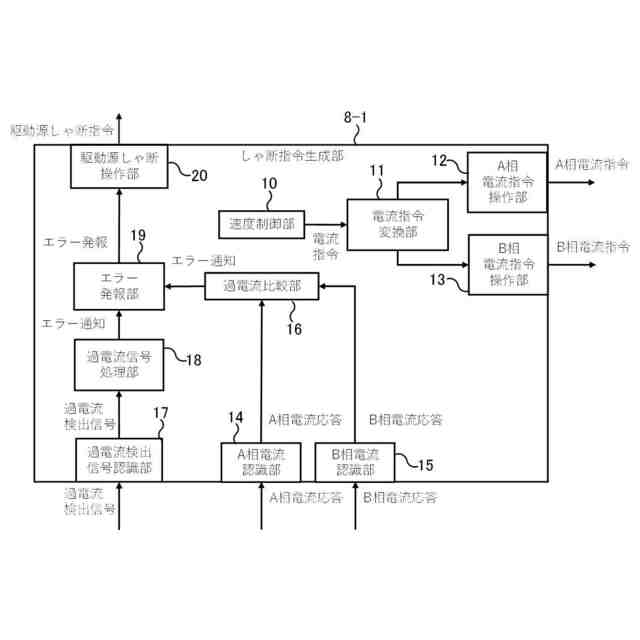
しゃ断指令生成部の機能ブロックを示す図である。
電流指令変換部の機能を説明するための図である。
過電流比較部の機能ブロックを示す図である。
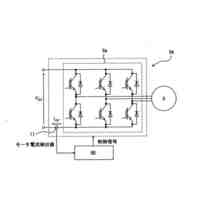
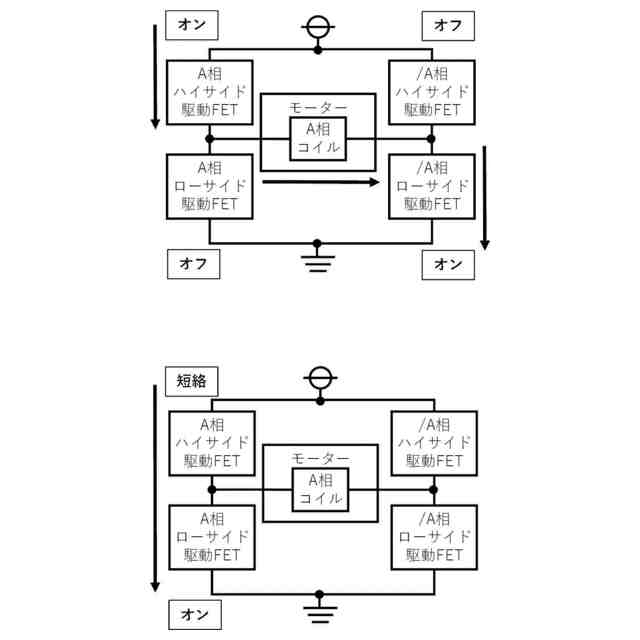
スイッチング素子が短絡したときに流れる電流について説明するための図である。
スイッチング素子が短絡したときに流れる電流について説明するための図である。
スイッチング素子が短絡していない正常時に流れる電流について説明するための図である。
スイッチング素子が短絡したときに流れる電流について説明するための図である。
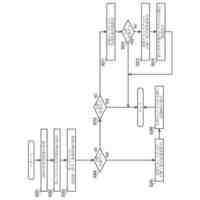
第1実施形態にかかる制御装置の動作を説明するためのフローチャートである。
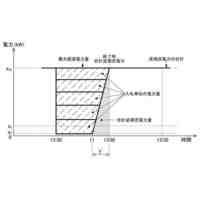
第1実施形態にかかる制御装置が動作中の電流の変化と閾値との関係を説明するための図である。
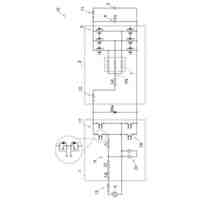
本開示の第2実施形態にかかる制御装置の構成を示す図である。
第2実施形態にかかるしゃ断指令生成部の機能の構成例を示す図である。
サーボオフ時過電流監視部の構成例を示す図である。
第2実施形態にかかる制御装置の動作を説明するためのフローチャートである。
第2実施形態にかかる制御装置が動作中の電流の変化と閾値との関係を説明するための図である。
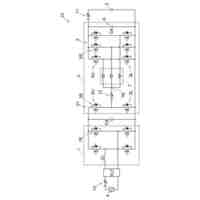
本開示の第3実施形態にかかる制御装置の構成を示す図である。
第3実施形態にかかるしゃ断指令生成部の機能の構成例を示す図である。
電流指令応答乖離監視部の構成例を示す図である。
第3実施形態にかかる制御装置の動作を説明するためのフローチャートである。
第3実施形態にかかる制御装置が動作中の電流の変化と閾値との関係を説明するための図である。
スイッチング素子が短絡したときに流れる電流について説明するための図である。
スイッチング素子が短絡したときに流れる電流について説明するための図である。
本開示の第4実施形態にかかる制御装置の構成を示す図である。
第4実施形態にかかるしゃ断指令生成部の機能の構成例を示す図である。
電力比較部の構成例を示す図である。
第4実施形態にかかる制御装置の動作を説明するための第1フローチャートである。
第4実施形態にかかる制御装置の動作を説明するための第2フローチャートである。
【発明を実施するための形態】
【0009】
以下、本発明の一実施形態について説明する。
【0010】
(第1実施形態)
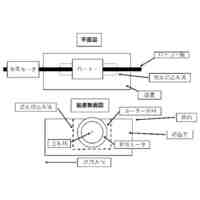
図1は、本開示の第1実施形態にかかる制御装置の構成を示す図である。制御装置100-1は、駆動源300からの電力でモータ200の回転を制御する装置である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
モータ
9日前
株式会社デンソー
モータ
17日前
株式会社神戸製鋼所
電動機
10日前
神保電器株式会社
配線器具取付枠
9日前
個人
太陽光発電電力活用プラットフォーム
9日前
住友電装株式会社
電気接続箱
9日前
個人
路面走行車両を利用した発電システム
10日前
住友電装株式会社
電気接続箱
17日前
富士電機株式会社
電力変換装置
9日前
株式会社ダイヘン
電力システム
9日前
ミネベアミツミ株式会社
モータ
16日前
矢崎総業株式会社
蓄電システム
10日前
株式会社ミツバ
電動モータ
2日前
東芝ライテック株式会社
電源装置
13日前
愛知電機株式会社
電動シュレッダとその駆動方法
17日前
システムカワバタ有限会社
コード収納装置
3日前
日新電機株式会社
ガス絶縁開閉装置
13日前
キヤノン株式会社
受電装置および送電装置
17日前
株式会社エフ・シー・シー
太陽光発電装置
16日前
株式会社エフ・シー・シー
太陽光発電装置
16日前
大阪瓦斯株式会社
電力調達装置
9日前
株式会社デンソー
電力変換装置
9日前
株式会社デンソー
電力変換装置
17日前
木谷電器株式会社
監視システム及び監視方法
16日前
株式会社アイシン
車載充電装置
16日前
株式会社TMEIC
電力変換装置
16日前
株式会社アイシン
車載充電装置
16日前
株式会社シマノ
発電装置
16日前
マツダ株式会社
回転電機
17日前
矢崎総業株式会社
電気接続箱
16日前
富士電機機器制御株式会社
過負荷保護装置
9日前
株式会社TMEIC
冷却器
16日前
株式会社ミツバ
モータ
13日前
大和ハウス工業株式会社
電力融通システム
9日前
株式会社デンソー
モータ
3日前
株式会社デンソー
モータ
9日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ