TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024164547
公報種別
公開特許公報(A)
公開日
2024-11-27
出願番号
2023080111
出願日
2023-05-15
発明の名称
翼角度測定装置、及びこれを用いた翼角度測定方法
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
F04D
29/56 20060101AFI20241120BHJP(液体用容積形機械;液体または圧縮性流体用ポンプ)
要約
【課題】翼角度測定装置の汎用性を高める。
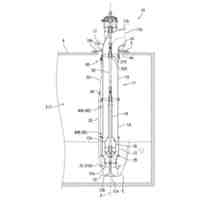
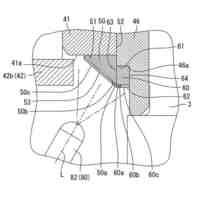
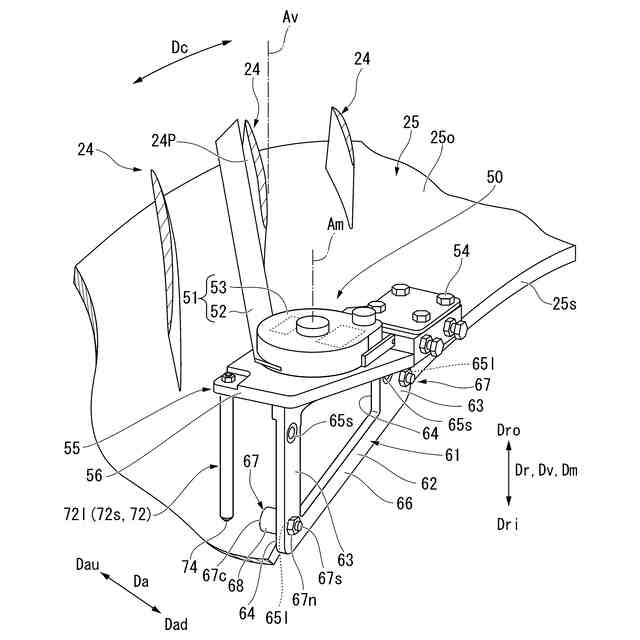
【解決手段】翼角度測定装置は、分度器と、前記分度器を支持して軸流流体機械における第二部材に接触可能な架台と、を備える。前記分度器は、軸流流体機械における第一部材の腕接触面に接触可能な測定腕と、前記測定腕を測定中心軸線回りに回転可能に支持して、前記測定腕の回転角度を測定可能な分度器本体と、を有する。前記架台は、前記分度器本体が取り付けられている基板と、前記基板から測定中心軸線方向に延びている第一脚及び第二脚と、を有する。前記第一脚は、前記第二部材の第一脚接触面と接触可能な装置基準面と、前記第二部材の第二脚接触面に接触可能な腕高さ確保面とを有する。前記第二脚は、前記第二脚接触面に接触可能な第二接触端を有する。前記第二脚は、前記基板から前記第二接触端までの長さを変更可能な脚である。
【選択図】図10
特許請求の範囲
【請求項1】
ロータ軸線を中心として回転可能なロータと、
前記ロータの外周を覆うケーシングと、
前記ケーシング内に配置され且つ前記ケーシングに取り付けられている複数の静翼と、
前記複数の静翼のうちの一部である可変静翼を前記ロータ軸線に対する径方向に延びる翼回転軸線回りに回転可能な角度変更機構と、
前記可変静翼の前記ロータ軸線に対する径方向内側に配置され、前記ロータ軸線を中心として環状の内側筒部材と、
を備え、
前記角度変更機構を構成する複数の部材と前記内側筒部材と前記可変静翼とのうち、第一部材は、前記可変静翼の回転に伴って前記翼回転軸線回りに回転する可変面と、前記ロータ軸線に対して垂直な角度基準面と、のうちの一方の面である腕接触面を有し、
前記角度変更機構を構成する複数の部材と前記内側筒部材と前記可変静翼とのうち、第二部材は、前記可変面と前記角度基準面とのうちの他方の面である第一脚接触面と、前記第一脚接触面に対して交差する方向に広がり且つ前記ロータ軸線に対する径方向外側を向く第二脚接触面と、を有する、
軸流流体機械における、前記可変静翼の回転角度を測定可能な翼角度測定装置において、
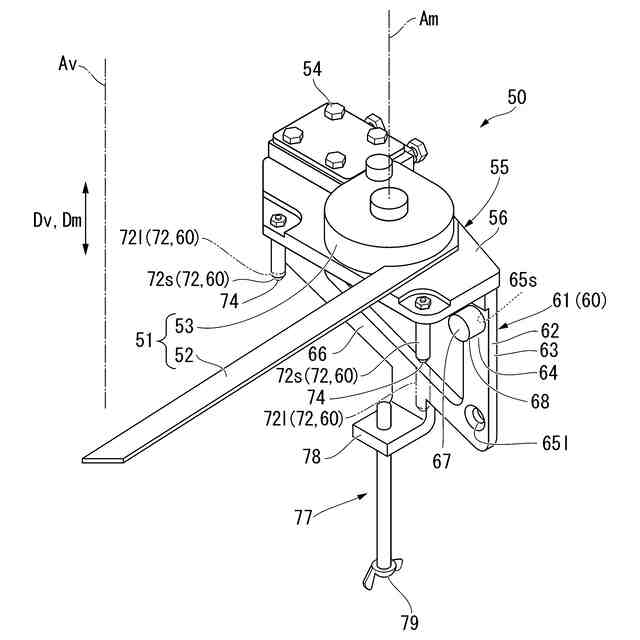
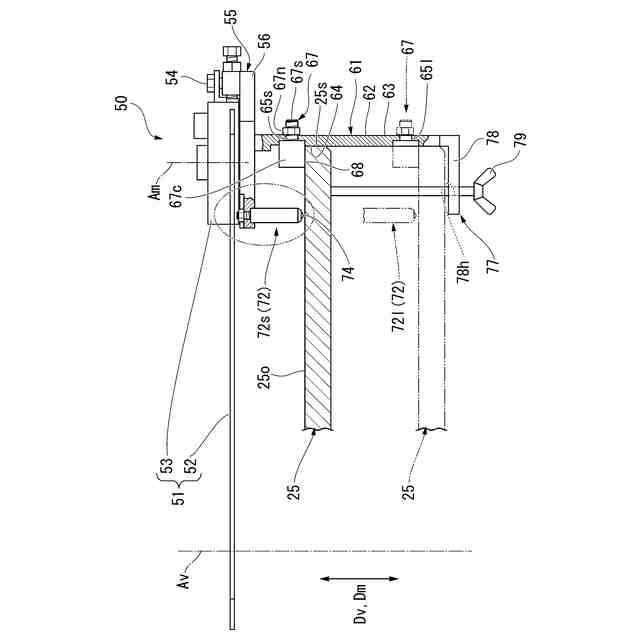
前記第一部材の前記腕接触面に接触可能な測定腕と、前記測定腕を測定中心軸線回りに回転可能に支持して、前記測定腕の回転角度を測定可能な分度器本体と、を有する分度器と、
前記分度器を支持して、前記第二部材に接触可能な架台と、
を備え、
前記架台は、前記分度器本体が取り付けられている基板と、前記基板に取り付けられ、前記測定中心軸線が延びている測定中心軸線方向成分を含む方向に延びている複数の脚と、を有し、
前記複数の脚のうちの第一脚は、前記第二部材の前記第一脚接触面と接触可能な装置基準面と、前記第一脚接触面に前記装置基準面が接触している際に前記第二脚接触面に接触可能な腕高さ確保面とを有し、
前記複数の脚のうちの第二脚は、前記装置基準面が前記第一脚接触面に接触し且つ前記腕高さ確保面が前記第二脚接触面に接触している際、前記第一脚の前記腕高さ確保面から離れた位置で前記第二脚接触面に接触可能な第二接触端を有し、前記測定中心軸線が前記翼回転軸線と平行になるよう、前記基板の傾きを調整可能に、前記基板から前記第二接触端までの長さを変更可能な脚である、
翼角度測定装置。
続きを表示(約 3,000 文字)
【請求項2】
請求項1に記載の翼角度測定装置において、
前記第二脚は、前記第二接触端としての球と、前記球の中心を中心として前記球を回転可能に支持する第二脚本体と、を有する、
翼角度測定装置。
【請求項3】
請求項1に記載の翼角度測定装置において、
前記第二脚は、複数の交換脚であり、
前記複数の交換脚は、互いの長さが異なり、それぞれが前記基板に取付可能である、
翼角度測定装置。
【請求項4】
請求項1に記載の翼角度測定装置において、
前記第二脚は、長さ調整脚であり、
前記長さ調整脚は、前記基板から前記測定中心軸線方向を含む方向への突出量が調整可能に前記基板に取付可能である、
翼角度測定装置。
【請求項5】
請求項1から4のいずれか一項に記載の翼角度測定装置において、
前記第一脚は、前記装置基準面を有する第一脚本体と、前記腕高さ確保面を有し、前記第一脚本体に対する前記測定中心軸線方向の位置を変更可能に前記第一脚本体に取り付けられている高さ調整端と、有する、
翼角度測定装置。
【請求項6】
請求項1から4のいずれか一項に記載の翼角度測定装置において、
前記架台は、前記第一脚に設けられ、前記第一脚の前記腕高さ確保面及び前記第二脚の第二接触端との間で前記第二部材を挟むことができる挟み込み部材を有する、
翼角度測定装置。
【請求項7】
請求項1から4のいずれか一項に記載の翼角度測定装置を用いて、前記可変静翼の回転角度を測定する翼角度測定方法において、
前記内側筒部材は、前記ロータ軸線を中心として筒状を成し、外周面と、前記外周面における前記ロータ軸線が延びるロータ軸線方向の端につながり前記ロータ軸線に対する垂直な端面と、を有し、前記外周面が前記可変静翼よりも前記ロータ軸線に対する径方向内側に位置するガスパス面形成筒であり、
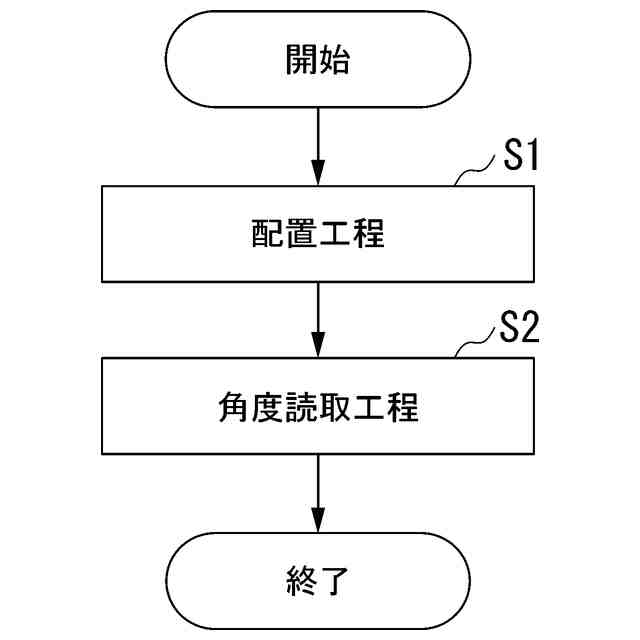
前記翼角度測定装置を配置する配置工程と、
前記配置工程後における前記分度器本体が示す角度を読み取る角度読取工程と、
を実行し、
前記配置工程では、
前記第一脚の前記装置基準面を前記第二部材の前記第一脚接触面に接触させ、
前記第一脚の前記腕高さ確保面を前記第二部材の前記第二脚接触面に接触させ、
前記第二脚の前記第二接触端を前記第二部材の前記第二脚接触面に接触させ、且つ、前記測定中心軸線が前記翼回転軸線と平行になるよう、前記基板の傾きを調整するために、前記基板から前記第二接触端までの長さを必要に応じて変更し、
前記測定腕を前記第一部材の前記腕接触面に接触させ、
前記第一部材は、前記可変静翼であり、
前記第一部材の前記腕接触面が前記可変静翼の正圧面であり、
前記第二部材は、前記ガスパス面形成筒であり
前記第二部材の前記第一脚接触面は、前記ガスパス面形成筒の前記端面であり、
前記第二部材の前記第二脚接触面は、前記ガスパス面形成筒の前記外周面である、
翼角度測定方法。
【請求項8】
請求項1から4のいずれか一項に記載の翼角度測定装置を用いて、前記可変静翼の回転角度を測定する翼角度測定方法において、
前記内側筒部材は、前記ロータ軸線を中心として筒状を成し、外周面と、前記外周面における前記ロータ軸線が延びるロータ軸線方向の端につながり前記ロータ軸線に対する垂直な端面と、を有し、前記外周面が前記可変静翼よりも前記ロータ軸線に対する径方向内側に位置するシールリングであり、
前記シールリングは、前記翼回転軸線を中心として前記可変静翼が回転可能に前記可変静翼を支持し、
前記翼角度測定装置を配置する配置工程と、
前記配置工程後における前記分度器本体が示す角度を読み取る角度読取工程と、
を実行し、
前記配置工程では、
前記第一脚の前記装置基準面を前記第二部材の前記第一脚接触面に接触させ、
前記第一脚の前記腕高さ確保面を前記第二部材の前記第二脚接触面に接触させ、
前記第二脚の前記第二接触端を前記第二部材の前記第二脚接触面に接触させ、且つ、前記測定中心軸線が前記翼回転軸線と平行になるよう、前記基板の傾きを調整するために、前記基板から前記第二接触端までの長さを必要に応じて変更し、
前記測定腕を前記第一部材の前記腕接触面に接触させ、
前記第一部材は、前記可変静翼であり、
前記第一部材の前記腕接触面が前記可変静翼の正圧面であり、
前記第二部材は、前記シールリングであり
前記第二部材の前記第一脚接触面は、前記シールリングの前記端面であり、
前記第二部材の前記第二脚接触面は、前記シールリングの前記外周面である、
翼角度測定方法。
【請求項9】
請求項1から4のいずれか一項に記載の翼角度測定装置を用いて、前記可変静翼の回転角度を測定する翼角度測定方法において、
前記角度変更機構は、
前記可変静翼の前記ロータ軸線に対する径方向外側の端に取り付けられ、前記翼回転軸線を中心として円柱状の外側回転軸と、
前記外側回転軸に固定され、前記翼回転軸線に対する径方向に延びている第一リンク片と、
前記ケーシングよりも前記ロータ軸線に対する径方向外側に配置され、前記ロータ軸線を中心として環状を成し、前記ロータ軸線を中心として回転可能な回転リングと、
を有し、
前記第一リンク片は、前記翼回転軸線に対する径方向及び前記翼回転軸線が延びる翼回転軸線方向に広がるリンク側面と、前記リンク側面に対して交差する方向に広がり且つ前記ロータ軸線に対する径方向外側を向くリンク外側面と、を有し、
前記回転リングは、前記ロータ軸線に対して垂直なリング端面を有し、
前記翼角度測定装置を配置する配置工程と、
前記配置工程後における前記分度器本体が示す角度を読み取る角度読取工程と、
を実行し、
前記配置工程では、
前記第一脚の前記装置基準面を前記第二部材の前記第一脚接触面に接触させ、
前記第一脚の前記腕高さ確保面を前記第二部材の前記第二脚接触面に接触させ、
前記第二脚の前記第二接触端を前記第二部材の前記第二脚接触面に接触させ、且つ、前記測定中心軸線が前記翼回転軸線と平行になるよう、前記基板の傾きを調整するために、前記基板から前記第二接触端までの長さを必要に応じて変更し、
前記測定腕を前記第一部材の前記腕接触面に接触させ、
前記第一部材は、前記回転リングであり、
前記第一部材の前記腕接触面が前記回転リングの前記リング端面であり、
前記第二部材は、前記第一リンク片であり、
前記第二部材の前記第一脚接触面は、前記第一リンク片の前記リンク側面であり、
前記第二部材の前記第二脚接触面は、前記第一リンク片の前記リンク外側面である、
翼角度測定方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、可変静翼の回転角度を測定可能な翼角度測定装置、及びこれを用いた翼角度測定方法に関する。
続きを表示(約 2,300 文字)
【背景技術】
【0002】
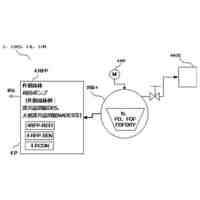
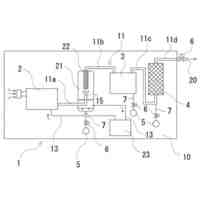
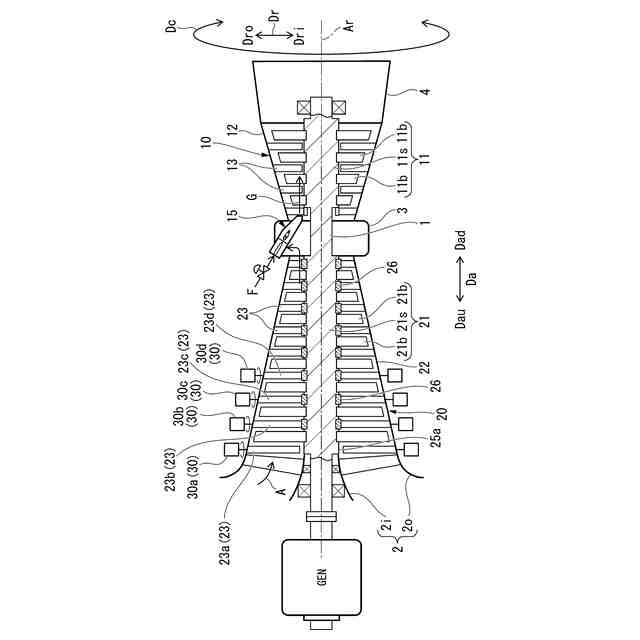
ガスタービンは、空気を圧縮可能な圧縮機と、圧縮機で圧縮された空気中で燃料を燃焼させて高温高圧の燃焼ガスを生成可能な燃焼器と、燃焼器からの燃焼ガスで駆動可能なタービンと、を備える。
【0003】
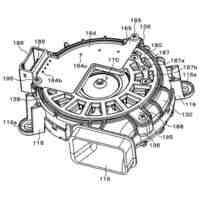
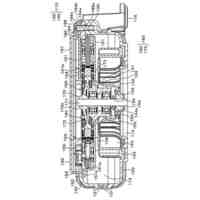
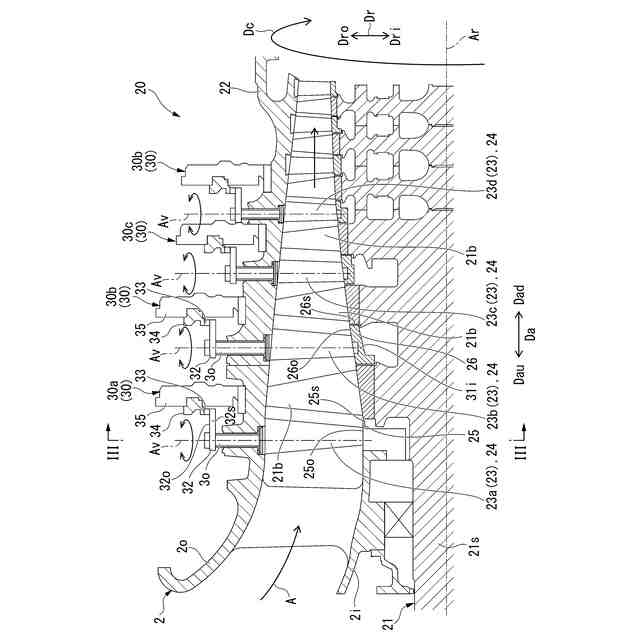
圧縮機は、軸流回転機械の一種で、ロータ軸線を中心として回転可能なロータと、ロータの外周を覆うケーシングと、複数の静翼列と、翼角度変更機構と、を有する。ロータは、ロータ軸線が延びるロータ軸線方向に並んでいる複数の動翼列と、を有する。複数の動翼列は、いずれも、ロータ軸線に対する周方向に並んでいる複数の動翼を有する。複数の静翼列も、ロータ軸線方向に並んでいる。複数の静翼列のうち、ロータ軸線上流側の1以上の静翼列は、可変静翼列を成す。一以上の可変静翼列は、いずれも、ロータ軸線に対する周方向に並んでいる複数の可変静翼を有する。複数の可変静翼は、それぞれ、ロータ軸線に対する径方向に延びる翼回転軸線回りに回転可能である。翼角度変更機構は、一の可変静翼列を構成する複数の可変静翼をそれぞれの翼回転軸線回りに回転させる機構である。
【0004】
軸流流体機械では、その組立時や点検時等に、可変静翼の最大回転角度及び最小回転角度を検査することがある。このため、以下の特許文献1には、可変静翼を最大回転角度及び最小回転角度にしたときの可変静翼の実際の回転角度を測定するための測定装置が開示されている。
【0005】
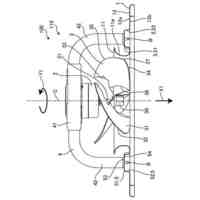
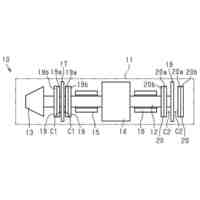
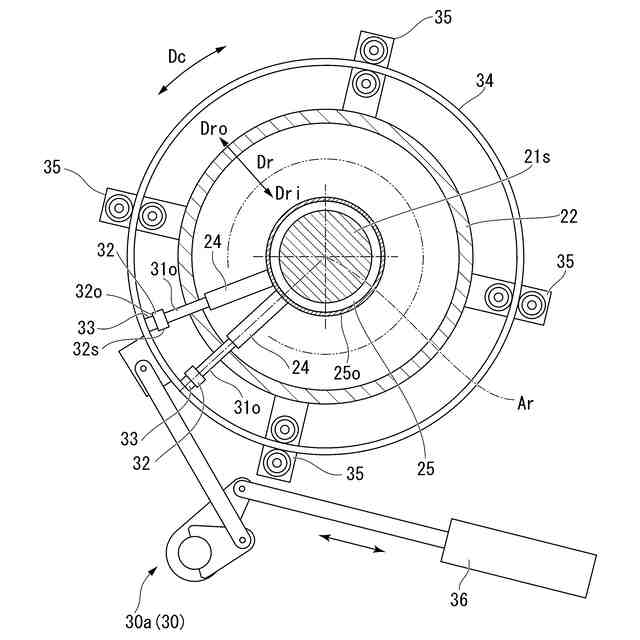
この測定装置に適用される翼角度変更機構は、外側回転軸と、第一リンク片と、第二リンク片と、回転リングと、を有する。外側回転軸は、可変静翼のロータ軸線に対する径方向外側の端に取り付けられ、翼回転軸線を中心として円柱状を成している。第一リンク片は、外側回転軸に固定され、翼回転軸線に対する径方向に延びている。回転リングは、軸流回転機械のケーシングよりもロータ軸線に対する径方向外側に配置され、ロータ軸線を中心として環状を成している。この回転リングは、ロータ軸線を中心として回転可能である。第二リンク片は、第一リンク片及び回転リングのそれぞれにピン結合している。この翼角度変更機構では、回転リングをロータ軸線回りに回転させて、翼回転軸線を中心として第一リンク片及び外側回転軸を一体回転させる。この結果、可変静翼が翼回転軸線を中心として回転する。
【0006】
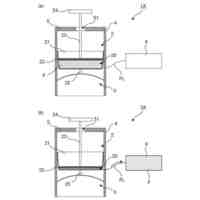
この特許文献1の技術では、可変静翼を最大回転角度にしたときの可変静翼の実際の回転角度を測定するための最大回転角度測定用の測定装置と、可変静翼を最小回転角度にしたときの可変静翼の実際の回転角度を測定するための最小回転角度測定用の測定装置とが必要である。いずれの測定装置も、架台(ガイド部)と接触片(対向部)とを有する。架台は、基板と複数の脚と、を有する。複数の脚は、基板から垂直な方向に延びている。接触片(対向部)は、ロータ軸線に対して垂直な回転リングの端面に接触可能な当接面を有する。この接触片は、架台の基板に固定されている。但し、最大回転角度測定用の測定装置と最小回転角度測定用の測定装置とでは、架台の基板に対する接触片の当接面の角度が異なっている。
【0007】
最大回転角度にした可変静翼の実際の回転角度を測定する際には、最大回転角度測定用の測定装置を用いる。この際、可変静翼を最大回転角度に設定した後、翼回転軸線を中心として、架台が外側回転軸及び第一リンク片と一体的に回転可能に、架台の複数の脚を第一リンク片に接触させる。さらに、接触片の当接面を回転リングの端面に接触させる。接触片の当接面の全体が回転リングの端面に接触していれば、可変静翼の現在の回転角度が目的の最大回転角度になっているとする。一方、接触片の当接面の一部のみが回転リングの端面に接触していれば、接触片の当接面の他の一部と回転リングの端面との間の隙間に、シックネスゲージ等を挿入して、この隙間の幅を計測する。そして、この隙間の幅から、可変静翼の現在の回転角度と目的の最大回転角度と差を求める。
【0008】
また、最小回転角度にした可変静翼の実際の回転角度を測定する際には、最小回転角度測定用の測定装置を用いる。この際、可変静翼を最小回転角度に設定した後、前述と同様、架台の複数の脚を第一リンク片に接触させと共に、接触片の当接面を回転リングの端面に接触させる。接触片の当接面の全体が回転リングの端面に接触していれば、可変静翼の現在の回転角度が目的の最小回転角度になっているとする。一方、接触片の当接面の一部のみが回転リングの端面に接触していれば、接触片の当接面の他の一部と回転リングの端面との間の隙間に、シックネスゲージ等を挿入して、この隙間の幅を計測する。そして、この隙間の幅から、可変静翼の現在の回転角度と目的の最小回転角度と差を求める。
【先行技術文献】
【特許文献】
【0009】
特開2015-175248号公報
【発明の概要】
【発明が解決しようとする課題】
【0010】
特許文献1に記載の技術では、可変静翼を最大回転角度にしたときの可変静翼の実際の回転角度を測定するために用いる測定装置と、可変静翼を最小回転角度にしたときの可変静翼の実際の回転角度を測定するために用いる測定装置とが必要である。このため、特許文献1に記載の技術では、一つの測定装置の汎用性が低く、装置コストが嵩む。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
扇子揺動システム
1か月前
個人
真空装置、真空ポンプ
4か月前
株式会社遠藤照明
筒型送風機
20日前
三菱電機株式会社
換気扇
4か月前
日機装株式会社
ポンプ装置
2か月前
日機装株式会社
ポンプ装置
2か月前
個人
流体を送れるし送れないファン
18日前
ダイキン工業株式会社
遠心ファン
1か月前
株式会社酉島製作所
ポンプ
2か月前
株式会社デンソー
清掃装置
2か月前
株式会社酉島製作所
ポンプ
1か月前
株式会社フクハラ
圧縮空気生成装置
3か月前
ミネベアミツミ株式会社
遠心送風機
4か月前
ミネベアミツミ株式会社
遠心送風機
4か月前
株式会社IHI
圧縮機
3か月前
ミネベアミツミ株式会社
遠心送風機
4か月前
株式会社不二越
油圧ユニット
2か月前
川崎重工業株式会社
ポンプシステム
3か月前
川崎重工業株式会社
ポンプシステム
3か月前
デンカ株式会社
ポンプ
2か月前
株式会社島津製作所
真空ポンプ
2か月前
株式会社酉島製作所
冷却ファン
1か月前
株式会社フクハラ
自動ドレン排出装置
1か月前
CKD株式会社
圧縮空気供給機
2か月前
株式会社酉島製作所
立軸ポンプ
1か月前
スリーアップ株式会社
検知装置
3か月前
株式会社不二越
液圧駆動システム
1か月前
ダイキン工業株式会社
遠心圧縮機
4か月前
株式会社豊田自動織機
遠心圧縮機
19日前
個人
ゼンマイによる回転体起動時電力節約装置
2か月前
株式会社酉島製作所
ポンプ吸液槽
19日前
シャープ株式会社
送風装置
3か月前
シャープ株式会社
送風装置
2か月前
株式会社豊田自動織機
遠心圧縮機
3か月前
株式会社豊田自動織機
遠心圧縮機
2か月前
株式会社豊田自動織機
遠心圧縮機
1か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ