TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024162356
公報種別
公開特許公報(A)
公開日
2024-11-21
出願番号
2023077766
出願日
2023-05-10
発明の名称
符号化装置、復号化装置、及びコンピュータプログラム
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G06T
9/40 20060101AFI20241114BHJP(計算;計数)
要約
【課題】
レーザを照射したスキャンなどを行う場合における符号化の効率を向上する事が可能な符号化装置を提供する。
【解決手段】
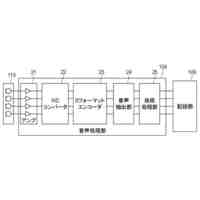
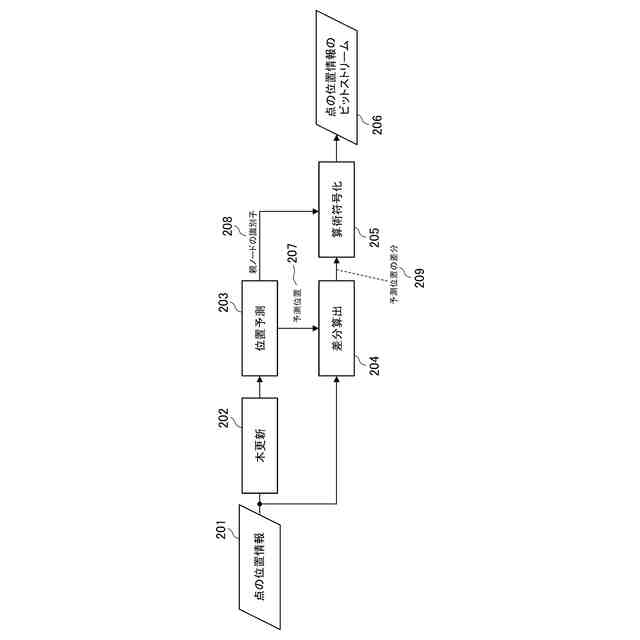
符号化装置において、複数の計測点からなる点群データを、計測手段から取得する取得手段と、前記計測手段の計測パターンに関する計測モデル情報に基づいて、前記複数の計測点に対応する予測点を算出する算出手段と、前記計測点と、前記計測点に対応する前記予測点との差分を演算する演算手段と、前記差分を符号化する符号化手段と、を備える。
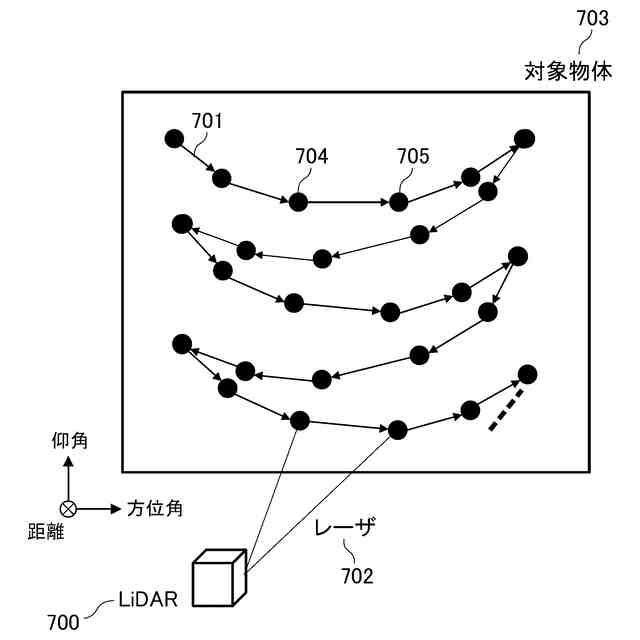
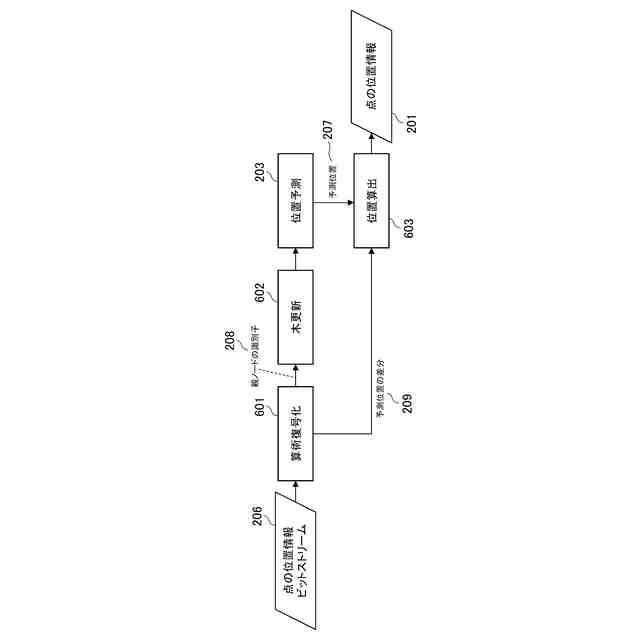
【選択図】 図7
特許請求の範囲
【請求項1】
複数の計測点からなる点群データを、計測手段から取得する取得手段と、
前記計測手段の計測パターンに関する計測モデル情報に基づいて、前記複数の計測点に対応する予測点を算出する算出手段と、
前記計測点と、前記計測点に対応する前記予測点との差分を演算する演算手段と、
前記差分を符号化する符号化手段と、
を備えることを特徴とする符号化装置。
続きを表示(約 1,000 文字)
【請求項2】
前記取得手段は、前記計測手段がレーザを照射したスキャンを行うことによって生成された前記複数の計測点からなる前記点群データを取得する、ことを特徴とする請求項1に記載の符号化装置。
【請求項3】
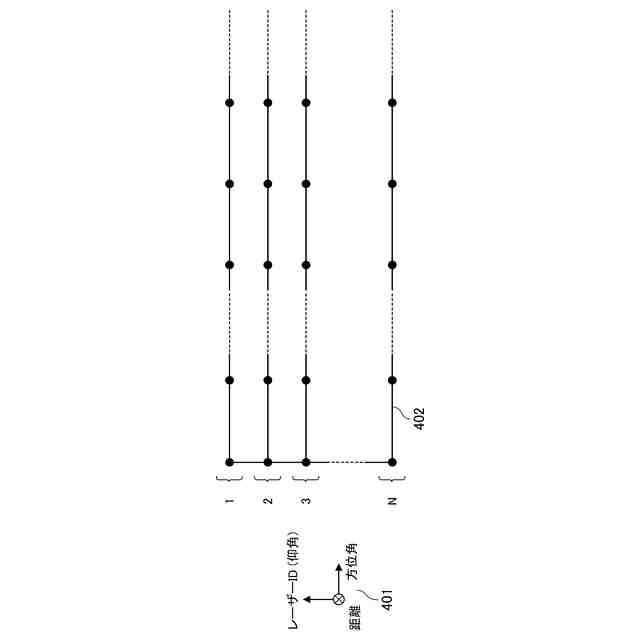
前記計測モデル情報は、前記計測手段のスキャン時におけるレーザの照射位置又はレーザの照射タイミングに基づいたIDで管理された複数の点に関する情報を含む、ことを特徴とする請求項2に記載の符号化装置。
【請求項4】
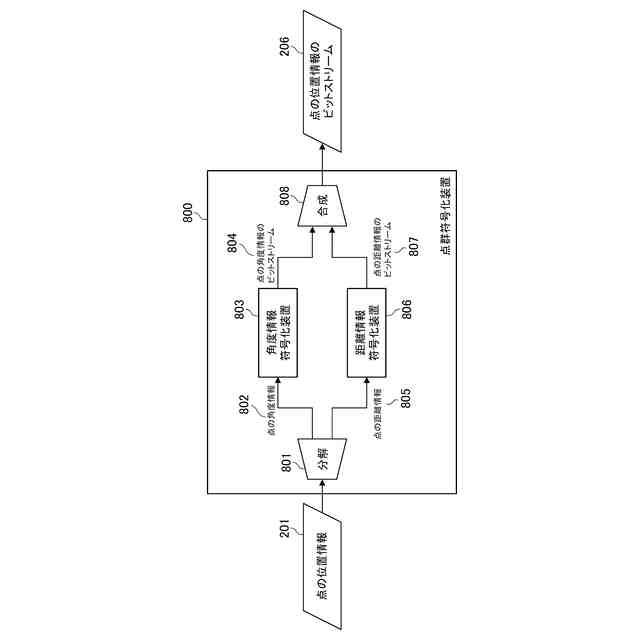
前記複数の計測点の情報は、前記計測手段の計測時におけるレーザの照射角度に関する角度情報を含み、
前記計測モデル情報は、前記計測手段のスキャン時におけるレーザの照射角度に関する角度モデル情報を含む、ことを特徴とする請求項2に記載の符号化装置。
【請求項5】
前記角度情報は、前記計測手段の計測時におけるレーザの方位角と仰角とを含み、
前記角度モデル情報は、前記計測手段のスキャン時におけるレーザの方位角モデルと仰角モデルとを含む、ことを特徴とする請求項4に記載の符号化装置。
【請求項6】
前記複数の計測点の情報は、前記計測手段の計測時におけるレーザの照射タイミングを示す照射時間情報を含み、
前記計測モデル情報は、前記計測手段のスキャン時におけるレーザの照射タイミングを示す照射時間モデル情報を含む、ことを特徴とする請求項2に記載の符号化装置。
【請求項7】
前記計測モデル情報と前記計測点の角度の差分に基づき、前記計測モデル情報を修正する修正手段を有することを特徴とする請求項1に記載の符号化装置。
【請求項8】
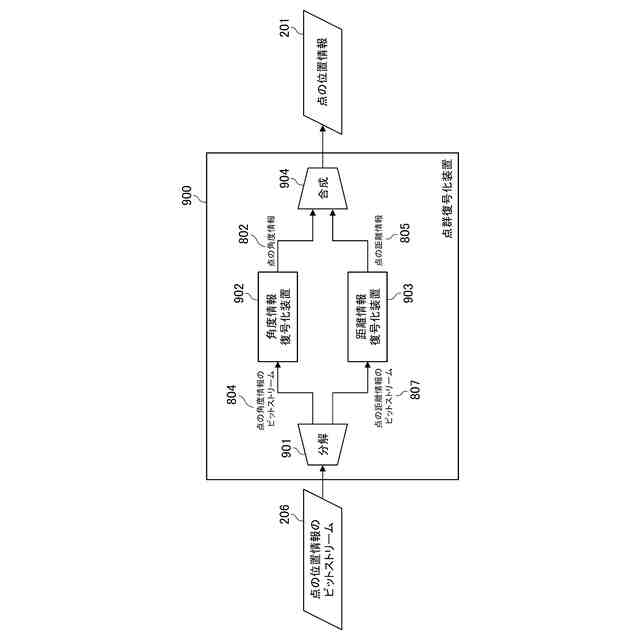
計測手段の計測パターンに関する計測モデル情報を有し、前記計測モデル情報と符号化データに含まれる角度情報との比較結果に基づき計測点の情報を復号化する復号化手段を備えることを特徴とする復号化装置。
【請求項9】
前記計測手段がレーザを照射したスキャンを行うことによって生成された前記複数の計測点からなる点群データを取得する取得手段を有する、ことを特徴とする請求項8に記載の復号化装置。
【請求項10】
前記複数の計測点の情報は、前記計測手段の計測時におけるレーザの照射角度に関する角度情報を含み、
前記計測モデル情報は、前記計測手段のスキャン時におけるレーザの照射角度に関する角度モデル情報を含む、ことを特徴とする請求項9に記載の復号化装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、符号化装置、復号化装置、及びコンピュータプログラム等に関するものである。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
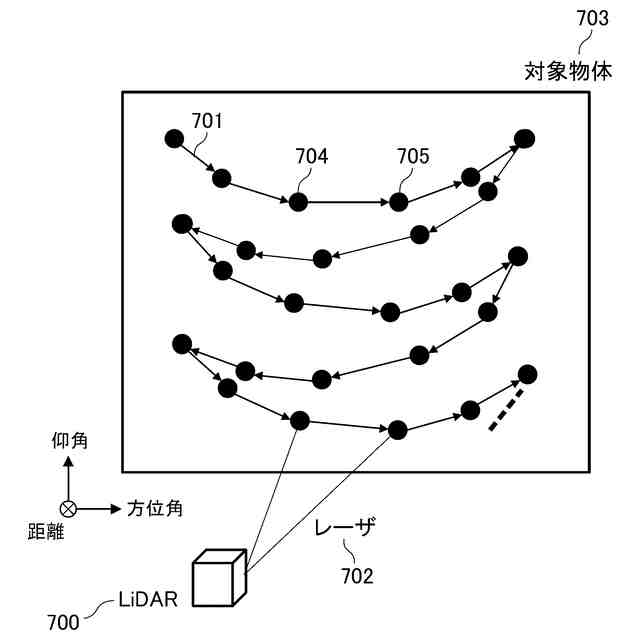
近年、自動運転技術開発やVR(Virtual Reality)技術の普及に伴い、3次元位置情報を計測する事が可能なLiDAR(Light Detection And Ranging)技術の開発が進められている。
【0003】
LiDARとはレーザの照射角度を高速で変更しながら、離散的にレーザを照射し、各照射角度においてレーザの反射光が戻るまでの時刻を計測する事で、周辺物体の3次元位置情報を計測する機器のことである。LiDARは各レーザの照射角度における物体までの距離情報から周辺物体の3次元位置情報を示す点の集まりを点群データとして出力する。
【0004】
一般的に、点群データは大量の点を含んでおり、各点は位置情報に加えて、例えばタイムスタンプ情報、インテンシティ情報、RGB情報などの複数の属性情報を持っている。点群データは大量のデータであるため、記憶及び通信にコストがかかる可能性があり、これらの処理にも時間がかかる可能性がある。
【0005】
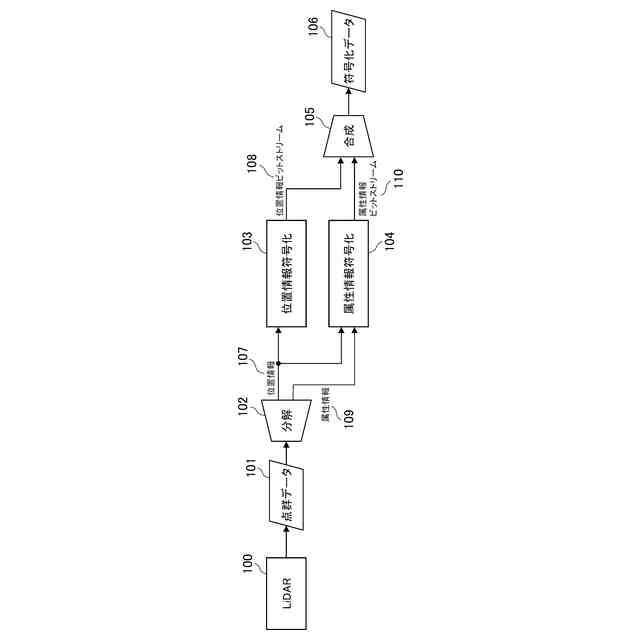
これらの課題に対して、点群のデータを減少させる要求があり、例えばMPEG(Moving Picture Experts Group)では、非特許文献1にて開示されている点群の符号化のための手法であるG-PCC(Geometry based Point Cloud Compresion)を提供している。
【0006】
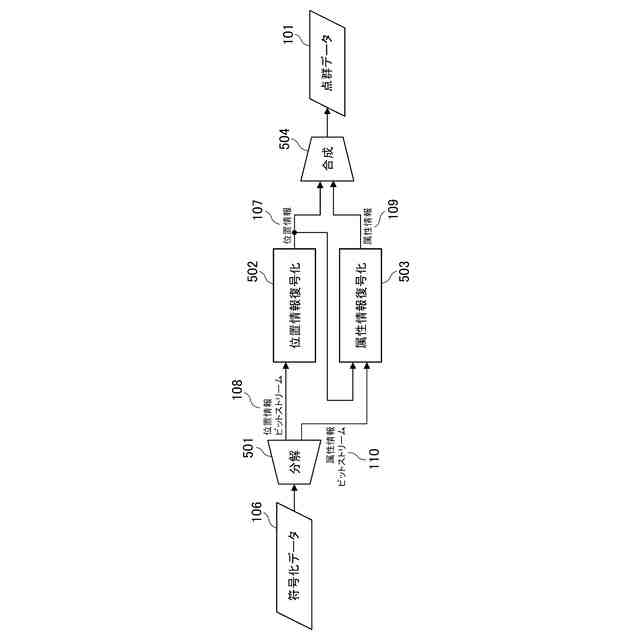
G-PCCは、点群データの各点の3次元の座標で表される位置情報(Geometry)と、タイムスタンプやインテンシティなどの属性情報(Attribute)を、夫々異なるプロセスで符号化を行なう。
【0007】
又、例えば特許文献1には、LiDARにより取得した計測データに対し、計測データを地物の外形を表すテンプレートにより近似するためのパラメータを、圧縮データとして生成するデータ圧縮装置が記載されている。
【先行技術文献】
【特許文献】
【0008】
特開2018-116452号公報
【非特許文献】
【0009】
G-PCC codec description v2、ISO/IEC MPEG (JTC 1/SC 29/WG11)、N18189
【発明の概要】
【発明が解決しようとする課題】
【0010】
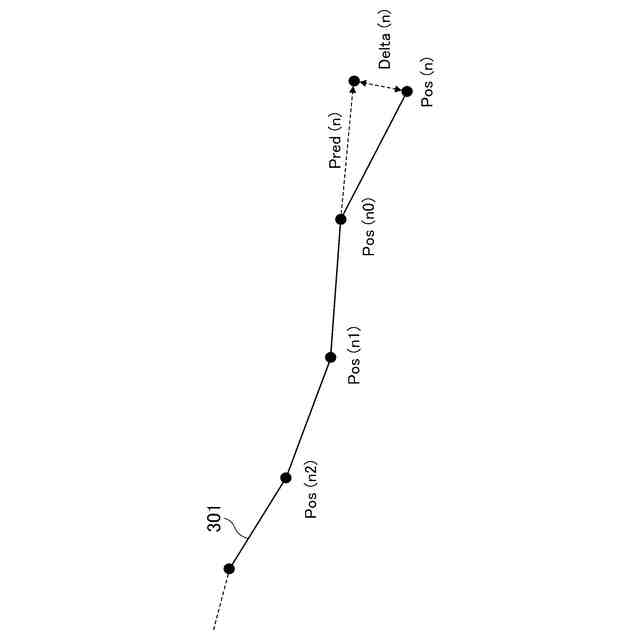
しかし、非特許文献1に記載された手法では、LiDARが複雑なスキャン経路を持つ場合は、過去のスキャンからの予測された方位角及び仰角と次のスキャンの方位角及び仰角の差分値が大きくなり、符号化時の圧縮効率が低下してしまう。又、特許文献1の手法では、地物の外形を表すテンプレートが必要となるため、周囲の環境の影響を受けやすい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
撮像装置
2日前
キヤノン株式会社
撮像装置
今日
キヤノン株式会社
光学機器
1日前
キヤノン株式会社
撮像装置
5日前
キヤノン株式会社
撮像装置
1日前
キヤノン株式会社
情報機器
今日
キヤノン株式会社
画像形成装置
1日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
光電変換装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
5日前
キヤノン株式会社
情報処理装置
5日前
キヤノン株式会社
シート積載装置
今日
キヤノン株式会社
冷却装置と電子機器
1日前
キヤノン株式会社
測距装置および機器
今日
キヤノン株式会社
撮像システム、及び車両
1日前
キヤノン株式会社
ズームレンズ及び撮像装置
2日前
キヤノン株式会社
TDC装置および測距装置
5日前
キヤノン株式会社
クラウドプリントサービス
今日
キヤノン株式会社
光電変換装置及び測距装置
今日
キヤノン株式会社
レンズ装置および撮像装置
2日前
キヤノン株式会社
情報提供システムおよび方法
1日前
キヤノン株式会社
ズームレンズおよび撮像装置
5日前
キヤノン株式会社
ズームレンズおよび撮像装置
2日前
キヤノン株式会社
光走査装置及び画像形成装置
今日
キヤノン株式会社
光走査装置及び画像形成装置
今日
キヤノン株式会社
電源装置および画像形成装置
2日前
キヤノン株式会社
画像読取装置、画像形成装置
5日前
キヤノン株式会社
通信装置および通信システム
1日前
キヤノン株式会社
遮熱膜、遮熱塗料、及び塗装物
1日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ