TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024157896
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023072548
出願日
2023-04-26
発明の名称
検出システム、検出方法、及び作業車両
出願人
株式会社小松製作所
代理人
弁理士法人酒井国際特許事務所
主分類
G01S
17/931 20200101AFI20241031BHJP(測定;試験)
要約
【課題】障害物と粉塵とを区別して検出可能な検出システム、検出方法、及び作業車両を提供すること。
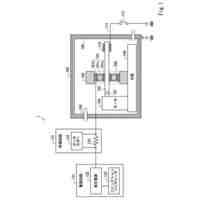
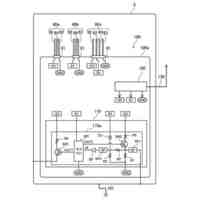
【解決手段】検出システムは、作業車両に取り付けられ、作業車両の周辺に存在する物体を検出する3次元センサ11と、コントローラ20と、を備え、コントローラ20は、3次元センサ11からの物体検出データに基づいて、障害物と粉塵とを区別して検出する検出部25と、を備え、3次元センサ11からの物体検出データは、物体の表面に規定される複数の検出点からなる点群を含み、検出部25は、3次元センサ11の検出範囲を分割したグリッドごとに、物体検出データに含まれる検出点の数と、3次元センサ11の分解能によって規定される点群密度閾値に基づく判定閾値とを比較して、障害物と粉塵とを区別して検出する。
【選択図】図2
特許請求の範囲
【請求項1】
作業車両に取り付けられ、前記作業車両の周辺に存在する物体を検出する物体検出センサと、
コントローラと、
を備え、
前記コントローラは、
前記物体検出センサからの物体検出データに基づいて、障害物と粉塵とを区別して検出する検出部と、
を備え、
前記物体検出センサからの物体検出データは、物体の表面に規定される複数の検出点からなる点群を含み、
前記検出部は、前記物体検出センサの検出範囲を分割したグリッドごとに、前記物体検出データに含まれる検出点の数と、前記物体検出センサの分解能によって規定される点群密度閾値に基づく判定閾値とを比較して、障害物と粉塵とを区別して検出する、
検出システム。
続きを表示(約 660 文字)
【請求項2】
前記検出部は、前記検出点の数が前記判定閾値以上である場合、障害物として検出する、
請求項1に記載の検出システム。
【請求項3】
前記検出部は、前記検出点の数が前記判定閾値未満である場合、粉塵として検出する、
請求項1または2に記載の検出システム。
【請求項4】
前記検出部は、地面から所定の高さ以上の前記検出点の数と、前記物体検出センサの分解能によって規定される点群密度閾値に基づく判定閾値とを比較する、
請求項1または2に記載の検出システム。
【請求項5】
前記判定閾値は、前記点群密度閾値に係数を乗じて算出される、
請求項1または2に記載の検出システム。
【請求項6】
作業車両に取り付けられ、前記作業車両の周辺に存在する物体を検出する物体検出センサと、
コントローラと、
を備えた検出方法であって、
前記物体検出センサから、物体の表面に規定される複数の検出点からなる点群を含む物体検出データを取得し、
前記物体検出センサの検出範囲を分割したグリッドごとに、前記物体検出データに含まれる検出点の数と、前記物体検出センサの分解能によって規定される点群密度閾値に基づく判定閾値とを比較して、障害物と粉塵とを区別して検出する、
検出方法。
【請求項7】
請求項1または2に記載の検出システムと、
車体と、
を備える、作業車両。
発明の詳細な説明
【技術分野】
【0001】
本開示は、検出システム、検出方法、及び作業車両に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
無人車両を含む作業車両において、障害物センサによって障害物が存在するか否かを判定する技術が知られている(例えば、特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2023-042394号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
作業車両は、例えば、鉱山または工事現場などのような粉塵が多く発生する作業現場で稼働する。このような作業現場では、粉塵が障害物として検出される可能性がある。そこで、障害物と粉塵とを区別して検出することが望まれる。
【0005】
本開示の態様は、障害物と粉塵とを区別して検出可能な検出システム、検出方法、及び作業車両を提供することを目的とする。
【課題を解決するための手段】
【0006】
本開示の態様に従えば、作業車両に取り付けられ、前記作業車両の周辺に存在する物体を検出する物体検出センサと、コントローラと、を備え、前記コントローラは、前記物体検出センサからの物体検出データに基づいて、障害物と粉塵とを区別して検出する検出部と、を備え、前記物体検出センサからの物体検出データは、物体の表面に規定される複数の検出点からなる点群を含み、前記検出部は、前記物体検出センサの検出範囲を分割したグリッドごとに、前記物体検出データに含まれる検出点の数と、前記物体検出センサの分解能によって規定される点群密度閾値に基づく判定閾値とを比較して、障害物と粉塵とを区別して検出する、検出システムが提供される。
【0007】
本開示の態様に従えば、作業車両に取り付けられ、前記作業車両の周辺に存在する物体を検出する物体検出センサと、コントローラと、を備えた検出方法であって、前記物体検出センサから、物体の表面に規定される複数の検出点からなる点群を含む物体検出データを取得し、前記物体検出センサの検出範囲を分割したグリッドごとに、前記物体検出データに含まれる検出点の数と、前記物体検出センサの分解能によって規定される点群密度閾値に基づく判定閾値とを比較して、障害物と粉塵とを区別して検出する、検出方法が提供される。
【0008】
本開示の態様に従えば、上記の検出システムと、車体と、を備える、作業車両が提供される。
【発明の効果】
【0009】
本開示の態様によれば、障害物と粉塵とを区別して検出可能な検出システム、検出方法、及び作業車両が提供される。
【図面の簡単な説明】
【0010】
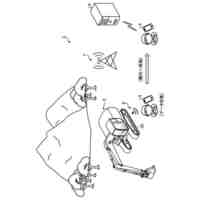
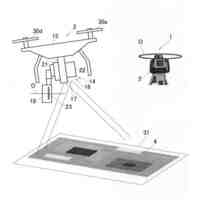
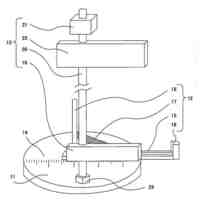
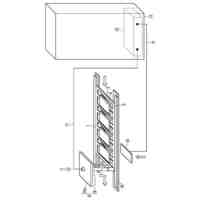
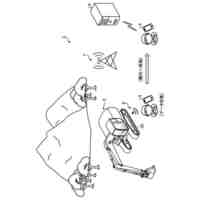
図1は、実施形態に係る作業車両を左前方斜め上側から見た斜視図である。
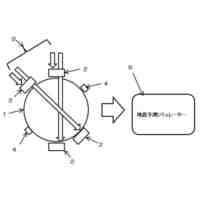
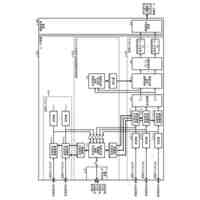
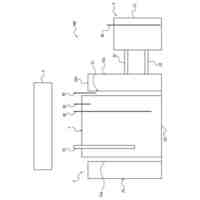
図2は、実施形態に係る検出システムを示す機能ブロック図である。
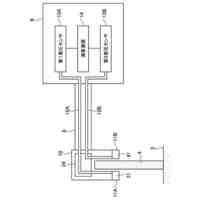
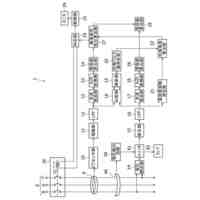
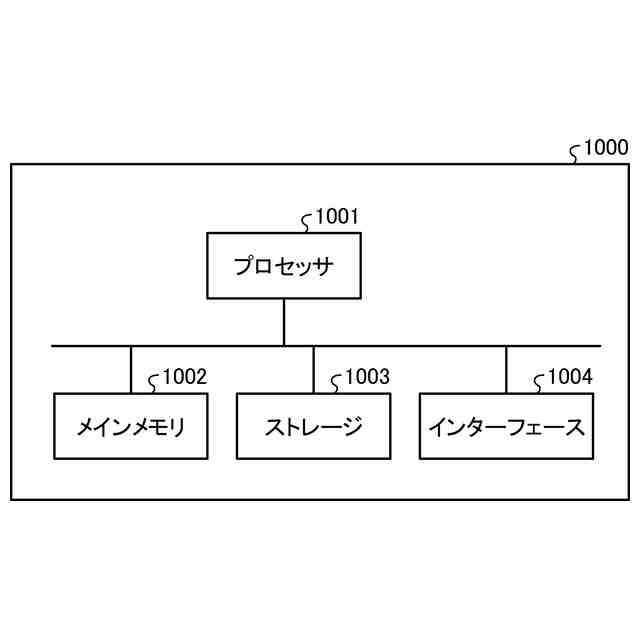
図3は、実施形態に係るコンピュータシステムを示すブロック図である。
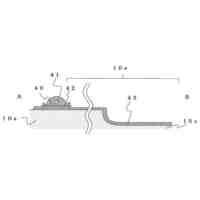
図4は、3次元センサによる物体の検出点の一例を示す模式図である。
図5は、3次元センサによる物体の検出点とグリッドとの一例を示す模式図である。
図6は、3次元センサの分解能を説明する模式図である。
図7は、物体の検出の一例を示す模式図である。
図8は、実施形態に係る検出システムの検出方法を示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社小松製作所
ポイント付与システム及びポイント付与方法
3日前
株式会社小松製作所
携帯端末、作業機械の管理システム、作業機械の管理方法、及びコンピュータプログラム
3日前
個人
地震予測システム
5日前
日本精機株式会社
検出装置
10日前
株式会社高橋型精
採尿具
1か月前
スガ試験機株式会社
環境試験機
1か月前
株式会社小野測器
測定器
11日前
株式会社トプコン
測量装置
1か月前
三菱電機株式会社
レーダ装置
2日前
アルファクス株式会社
積層プローブ
23日前
中国電力株式会社
短絡防止具
23日前
日本精機株式会社
補助計器システム
25日前
株式会社トプコン
測量システム
1か月前
大成建設株式会社
風力測定装置
10日前
キヤノン電子株式会社
サーボ加速度計
3日前
トヨタ自動車株式会社
評価装置
2日前
株式会社関電工
内径測定装置。
1か月前
キヤノン電子株式会社
サーボ加速度計
3日前
キヤノン電子株式会社
サーボ加速度計
23日前
日本特殊陶業株式会社
ガスセンサ
1か月前
積水樹脂株式会社
建築物用浸水測定装置
1か月前
株式会社精工技研
光電圧プローブ
10日前
リンナイ株式会社
電気機器
10日前
Igr技研株式会社
Igr測定装置
10日前
トヨタ自動車株式会社
校正システム
1か月前
倉敷紡績株式会社
フィルム測定装置
1か月前
ミツミ電機株式会社
流体センサ
1か月前
三菱電機株式会社
絶縁検査装置
1か月前
株式会社XMAT
測定装置および方法
1か月前
株式会社共和電業
物理量検出用変換器
10日前
個人
純金を作用電極に用いたORP測定装置
3日前
JFEスチール株式会社
試験装置
4日前
株式会社明電舎
応答時間評価方法
4日前
個人
作業機械の回転角度検出装置
4日前
ホシデン株式会社
センサ装置
3日前
矢崎総業株式会社
電流センサ
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ