TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024157832
公報種別
公開特許公報(A)
公開日
2024-11-08
出願番号
2023072434
出願日
2023-04-26
発明の名称
制御装置の設計方法および移動体の製造方法
出願人
三菱重工業株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20241031BHJP(制御;調整)
要約
【課題】1機のリーダである移動体と、リーダに追従する1機以上のフォロワである移動体からなる移動体群において、フォロワが他の移動体のすべての状態量を観測できない場合であっても、フォロワをリーダに追従させることができる制御装置の設計方法を提供する。
【解決手段】制御装置の設計方法は、オブザーバおよびフィードバック制御器を備える制御装置の設計方法であって、前記オブザーバの極の実部がすべて虚軸から負側に所定値だけ離れるように制約する線形行列不等式、および、前記オブザーバのH
∞
ノルムを最小化するように制約する線形行列不等式の両方を満たすオブザーバゲインを設計するステップと、前記フォロワそれぞれの設計した前記オブザーバを含む閉ループ系全体の安定を保証しつつ、追従制御性能を向上させるためのフィードバックゲインを線形行列不等式を用いて設計するステップとを有する。
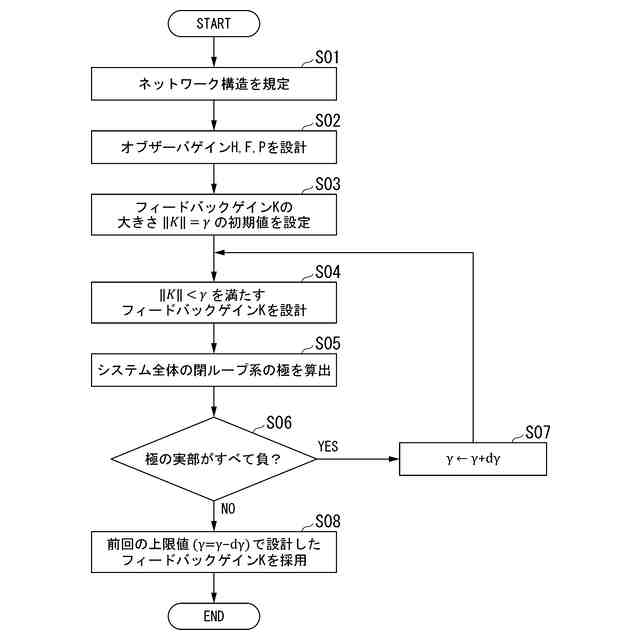
【選択図】図5
特許請求の範囲
【請求項1】
リーダである1機の移動体と、前記リーダに追従する1機以上のフォロワである移動体からなる移動体群における前記フォロワの制御装置の設計方法であって、
前記フォロワの前記制御装置は、
前記リーダおよび他のフォロワのうち少なくとも1機である隣接エージェントと自機との相対位置と、オブザーバゲインとに基づいて、前記隣接エージェントとの状態量相対値を推定するオブザーバと、
前記状態量相対値の推定値と、フィードバックゲインとに基づいて、自機が前記リーダに追従するための制御入力を出力するフィードバック制御器と、
を備え、
前記制御装置の設計方法は、前記オブザーバの極の実部がすべて虚軸から負側に所定値だけ離れるように制約する線形行列不等式、および、前記オブザーバのH
∞
ノルムを最小化するように制約する線形行列不等式の両方を満たすオブザーバゲインを設計するステップと、前記フォロワそれぞれの設計した前記オブザーバおよび前記フィードバック制御器を含む閉ループ系全体の安定を保証しつつ、前記リーダへの追従制御性能を向上させるためのフィードバックゲインを線形行列不等式を用いて設計するステップとを有する、
制御装置の設計方法。
続きを表示(約 810 文字)
【請求項2】
前記オブザーバゲインを設計するステップは、指定された範囲内でオブザーバの収束速度を決める前記所定値を変化させながら前記オブザーバゲインの設計を繰り返し実行し、前記収束速度が予め設定された速度以下となるように、前記所定値を決定する、
請求項1に記載の制御装置の設計方法。
【請求項3】
前記閉ループ系の極の実部がすべて負である間、フィードバックゲインの大きさの上限値を漸増させながら、前記閉ループ系を安定させるように制約する線形行列不等式、および前記フィードバックゲインの大きさが前記上限値以下となるように制約する線形行列不等式の両方を満たすフィードバックゲインを設計するステップをさらに有する、
請求項1に記載の制御装置の設計方法。
【請求項4】
前記隣接エージェントとの相対位置に基づいて、自機の目標位置に対する定常偏差を低減する補正値を出力する積分器を追加するステップをさらに有する、
請求項3に記載の制御装置の設計方法。
【請求項5】
前記オブザーバゲインを設計するステップは、指定された複数の速力に対応する複数のオブザーバゲインを設計する、
請求項1に記載の制御装置の設計方法。
【請求項6】
前記フィードバックゲインを設計するステップは、指定された複数の速力に対応する複数のフィードバックゲインを設計する、
請求項3に記載の制御装置の設計方法。
【請求項7】
リーダである1機の移動体と、前記リーダに追従する1機以上のフォロワである移動体からなる移動体群における、前記フォロワである移動体の製造方法であって、
請求項1から6のいずれか一項に記載の制御装置の設計方法で設計されたゲインに基づいて、前記制御装置を製造する工程を有する、
移動体の製造方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、制御装置の設計方法および移動体の製造方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
特許文献1には、複数の移動体(エージェント)が互いの位置を認識しながら、各移動体が自律分散的に監視領域内のリスクが高い地点それぞれに向かって移動する分散制御システムが記載されている。
【0003】
なお、特許文献1に記載の技術では、各エージェントが収束する合意値は時不変である。また、特許文献1に記載の技術では、移動体の運動特性が考慮されていない。したがって、特許文献1に記載の技術では、1機のリーダである移動体に他のフォロワである移動体が追従するマルチエージェントシステムにおいて、動的に状態が変化するリーダに追従するように各フォロワを制御することは困難である。
【0004】
図17は、従来のフォロワの機能構成を示すブロック図である。
非特許文献1には、線形のマルチエージェントシステムにおけるリーダ・フォロワ制御手法が提案されている。図17に示すように、各フォロワは通信可能なリーダまたはフォロワ(あるフォロワiに情報を伝達する1機以上のエージェント。以下、「隣接エージェント」とも記載する。)の全状態量x
j
(たとえば、位置、速度、姿勢角、姿勢角速度など)を知ることができる場合、自機の状態量x
i
と隣接エージェントの状態量x
j
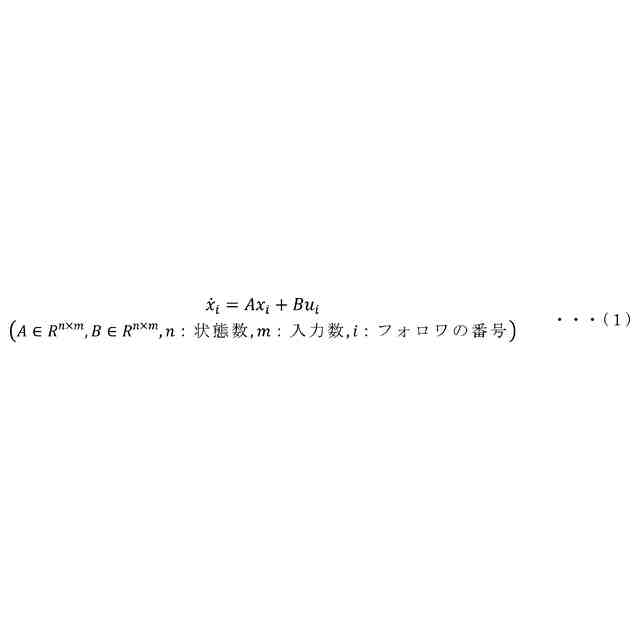
との相対値をフィードバックすることで、自機をリーダに追従させるリーダ・フォロワ制御を行う。ここで、制御対象であるフォロワの機体のダイナミクスは式(1)、機体への制御入力u
i
は式(2)で表される。
【0005】
TIFF
2024157832000002.tif
16
170
【0006】
TIFF
2024157832000003.tif
22
170
【0007】
また、非特許文献1には、システムの安定性が高くなるようにフィードバックゲインKを決定するための手法が記載されている。
【先行技術文献】
【特許文献】
【0008】
特開2019-74918号公報
【非特許文献】
【0009】
Weijun Cao, et. al., "Leader-follower consensus of linear multi-agent systems with unknown external disturbances", System & Control Letters, Vol. 82, pp. 64-70, 2015
【発明の概要】
【発明が解決しようとする課題】
【0010】
たとえば水中で運用するUUVのように、通信が制限される(通信量が制限される、通信遅延や通信途絶などが発生する)場合がある。このように、通信が制限される条件下では、隣接エージェントから通信で取得する情報を最小限にする、無線通信を用いずにセンサ(カメラやレーザスキャナなど)により隣接エージェントの状態量を取得するなどの対策を行う必要がある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱重工業株式会社
可燃性ガス生成システム
1日前
三菱重工業株式会社
劣化評価装置、劣化評価システム、劣化評価方法及びプログラム
8日前
積水樹脂株式会社
磁性シート
29日前
個人
車両レバー操作装置
29日前
株式会社豊田自動織機
無人走行体
1か月前
株式会社豊田自動織機
自動走行体
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
オムロン株式会社
自律作業システム
1か月前
トヨタ自動車株式会社
搬送システム
18日前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送ロボット
8日前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
トヨタ自動車株式会社
ロボットシステム
18日前
エイブリック株式会社
ボルテージレギュレータ
1か月前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社栗本鐵工所
操作装置
9日前
株式会社FUJI
工作機械の操作システム
1日前
株式会社デンソー
電子制御装置
1か月前
株式会社ダイフク
物品搬送設備
1か月前
東芝ライテック株式会社
管理システム
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
18日前
株式会社フカデン
外周部加工システム
2か月前
株式会社デンソー
移動体制御装置
2か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
アズビル株式会社
診断システムおよび診断方法
1か月前
大阪瓦斯株式会社
二次圧制御機構
2か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
8日前
大阪瓦斯株式会社
二次圧制御機構
2か月前
日立建機株式会社
自律走行システム
2か月前
株式会社豊田自動織機
移動体制御システム
29日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ