TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024156247
公報種別
公開特許公報(A)
公開日
2024-11-06
出願番号
2023070549
出願日
2023-04-24
発明の名称
非接触給電システム
出願人
株式会社デンソー
代理人
弁理士法人明成国際特許事務所
主分類
H02J
7/00 20060101AFI20241029BHJP(電力の発電,変換,配電)
要約
【課題】移動体の走行自由度を損なうことなく、効率的に給電が可能な非接触給電システムを提供する。
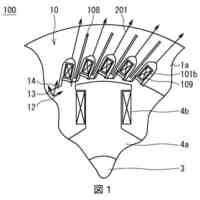
【解決手段】受電コイルを有する受電ユニットを備えた移動体2に非接触で給電する非接触給電システム1であって、交流電力を供給する電源10と、移動体が移動する移動路面6の少なくとも一部に配けられた送電ユニット4a、4b、4cであって、収容ケース内に送電コイルを含み、電源からの電力の供給を受けて、送電コイルを介した受電ユニットへの給電を、移動体の下から行う送電ユニットと、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
受電コイル(26)を有する受電ユニット(24)を備えた移動体(2)に非接触で給電する非接触給電システムであって、
交流電力を供給する電源(10)と、
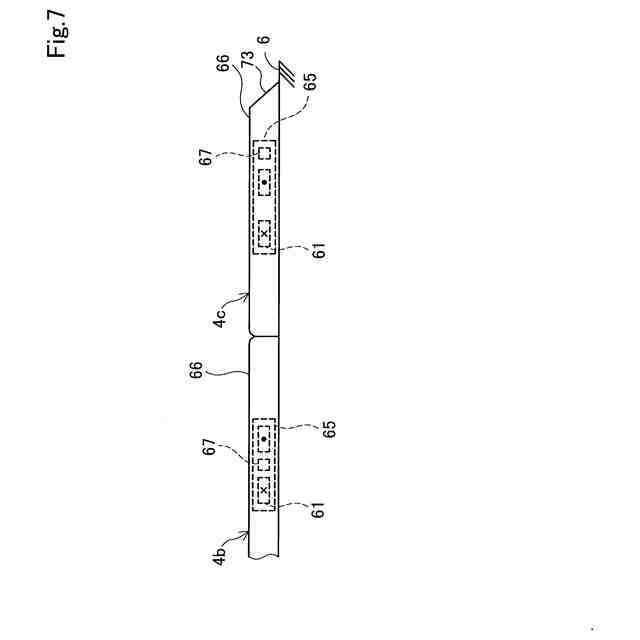
前記移動体が移動する移動路面(6)の少なくとも一部に配けられた送電ユニットであって、収容ケース(66)内に送電コイル(61)を含み、前記電源からの電力の供給を受けて、前記送電コイルを介した前記受電ユニットへの給電を、前記移動体の下から行う送電ユニット(4)と、
を備える、非接触給電システム。
続きを表示(約 1,200 文字)
【請求項2】
前記移動路面には、前記移動体が走行するラインの目印である位置マーカ(7)が複数設けられており、
前記移動体は、前記位置マーカに沿って走行するものであり、
前記送電ユニットは、前記位置マーカを基準とした前記移動路面における予め定められた位置に設けられている、請求項1に記載の非接触給電システム。
【請求項3】
前記送電ユニットには、前記位置マーカが一体化されている請求項2に記載の非接触給電システム。
【請求項4】
前記移動体は、複数の車輪(22,23)を有し、
前記送電ユニットは、前記移動路面の上に露出して設けられ、
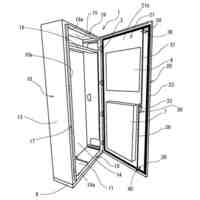
前記収容ケースは、前記複数の車輪の全てが同時に前記収容ケースの上に乗る大きさの上面部(72)を有する、請求項1に記載の非接触給電システム。
【請求項5】
前記収容ケースの前記上面部に接続され、前記上面部と前記移動路面とを繋ぐスロープ(73)、をさらに備える、請求項4に記載の非接触給電システム。
【請求項6】
前記移動体は、複数の車輪(22,23)を有し、
前記送電ユニットは、前記複数の車輪が通過する部位を避けて前記移動路面の上に露出して設けられている、請求項1に記載の非接触給電システム。
【請求項7】
前記移動体は、複数の車輪(22,23)を有し、
前記送電ユニットは、
前記収容ケース内に電子部品(67)を有し、
前記電子部品の位置が、前記複数の車輪が通過するラインである走行軌跡線(L)と上下方向においてずれた位置となるように、前記移動路面に設けられている、請求項1に記載の非接触給電システム。
【請求項8】
前記移動体は、複数の車輪(22,23)を有し、
前記収容ケース内には、前記複数の車輪が通過するラインである走行軌跡線(L)と対応する部位に、前記収容ケース内の上下方向の空間を保持する複数の支柱(71)が設けられている、請求項1に記載の非接触給電システム。
【請求項9】
前記移動体は、前記位置マーカを検出するマーカセンサ(25)を有し、前記マーカセンサにより前記位置マーカを読み取り、読み取った前記位置マーカを利用して前記移動体の自己位置を検出して前記位置マーカに沿って走行するものであり、
前記受電ユニットには、前記マーカセンサの検出範囲に対応した開口部(29)が形成されている、請求項2に記載の非接触給電システム。
【請求項10】
前記移動体は、前記位置マーカを検出するマーカセンサ(25)を有し、前記マーカセンサにより前記位置マーカを読み取り、読み取った前記位置マーカを利用して前記移動体の自己位置を検出して前記位置マーカに沿って走行するものであり、
前記受電ユニットが有する基板に、前記マーカセンサが一体に組み込まれている、請求項2に記載の非接触給電システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、非接触給電システムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
例えば、特許文献1に記載されるように、作業空間としての工場内を走行する移動体を使用して、搬送を行うシステムが知られている。こうした移動体は、前後移動、その場旋回等の動作が可能であり、工場内を縦横無尽に走行可能である。具体的な移動体としては、例えば、無人搬送車(Automatic Guided Vehicle,AGV)が知られている。また、移動体への給電方式としては、工場内の所定箇所に給電設備を設け、給電設備が設けられる給電場所において、接触式や移動体の側面からの非接触式にて給電するものが知られている。
【先行技術文献】
【特許文献】
【0003】
米国特許第8831984号明細書
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、接触式や移動体の側面からの非接触式給電では、給電中の移動体の走行自由度が損なわれるとともに、給電設備の設置場所も限られるため、給電機会を増やすことが困難であった。給電機会が少ないと、給電のために給電場所に待機して仕事をしない移動体が発生するため、搬送システムとしての稼働率が低下する。これを補うために、移動体の台数を増やす必要が生じていた。本開示は、上記のような点に鑑みて創作されたものであり、その目的は、移動体の走行自由度を損なうことなく、効率的に給電が可能な非接触給電システムを提供することにある。
【課題を解決するための手段】
【0005】
本開示は、以下の形態として実現することが可能である。
【0006】
本開示の一形態によれば、非接触給電システムが提供される。この非接触給電システムは、受電コイル(26)を有する受電ユニット(24)を備えた移動体(2)に非接触で給電する非接触給電システムであって、交流電力を供給する電源(10)と、前記移動体が移動する移動路面(6)の少なくとも一部に配けられた送電ユニットであって、収容ケース(66)内に送電コイル(61)を含み、前記電源からの電力の供給を受けて、前記送電コイルを介した前記受電ユニットへの給電を、前記移動体の下から行う送電ユニット(4)と、を備える。
上記構成によれば、走行中の移動体に対して、移動体の下から非接触で給電することができるので、移動路面に送電ユニットを設ける設置自由度を高くでき、給電機会を設けやすい。したがって、例えば、給電のために給電場所に待機して稼働を休止する移動体が発生することもなく、移動体の稼働率を向上させることができる。
【図面の簡単な説明】
【0007】
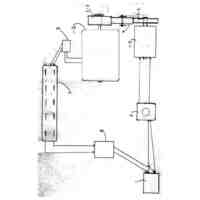
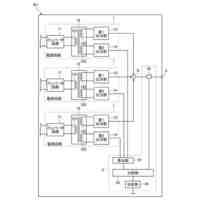
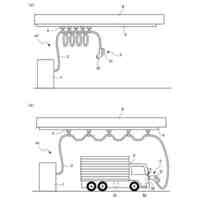
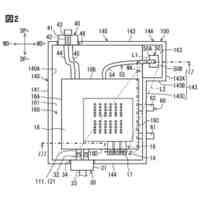
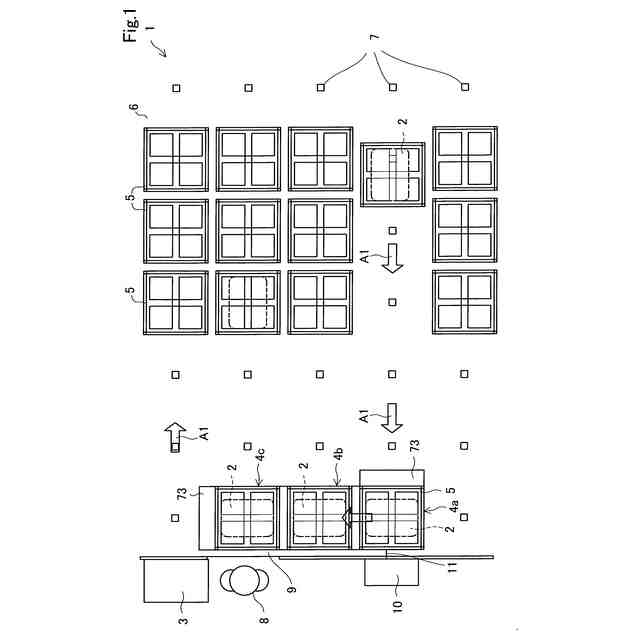
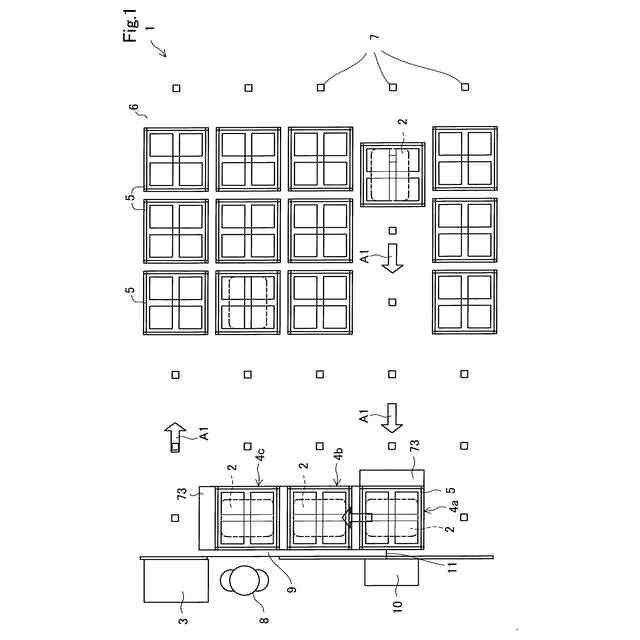
本開示の第1実施形態における、走行中給電システムの概略構成を示す平面図である。
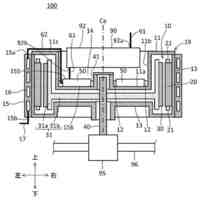
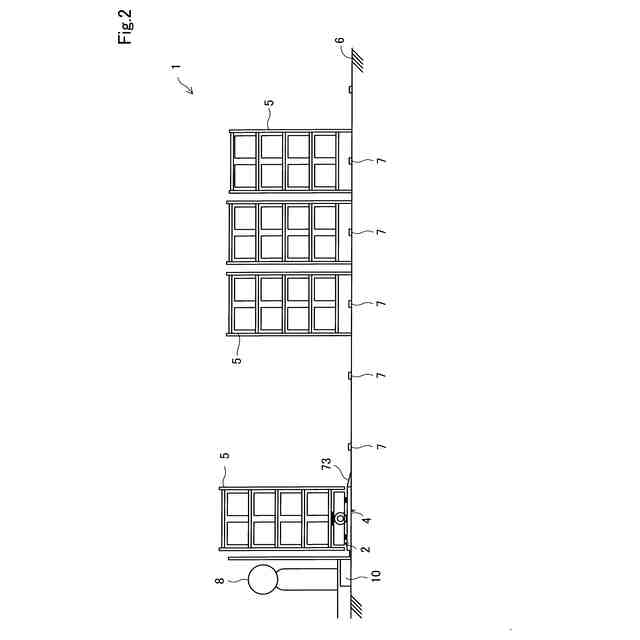
本開示の第1実施形態における、走行中給電システムの概略構成を示す側面図である。
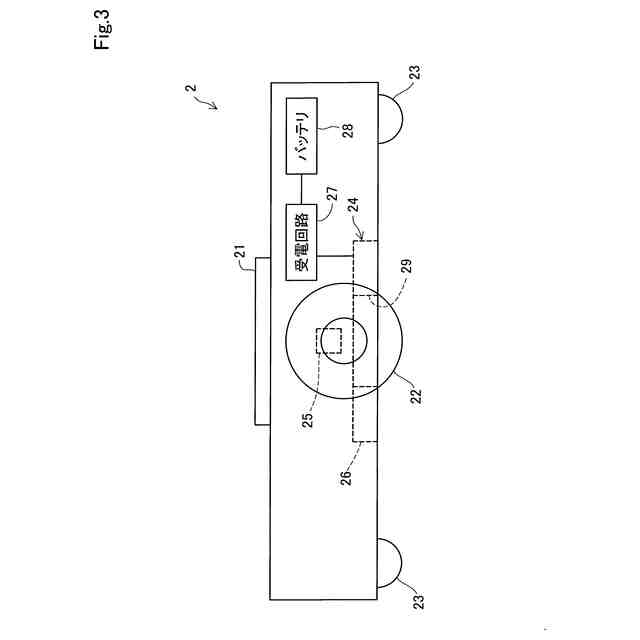
搬送車を模式的に示す側面図である。
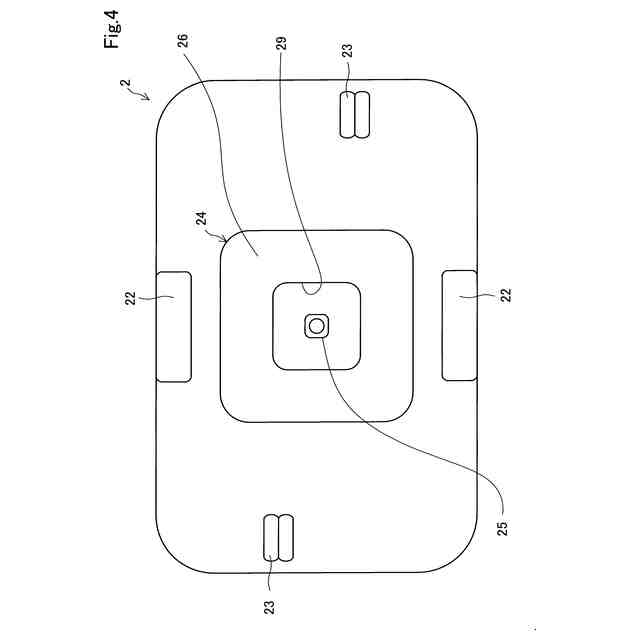
搬送車を模式的に示す下面図である。
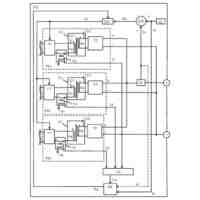
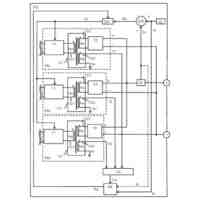
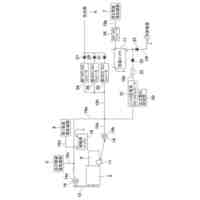
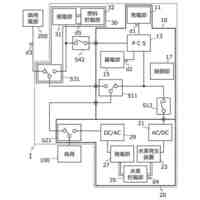
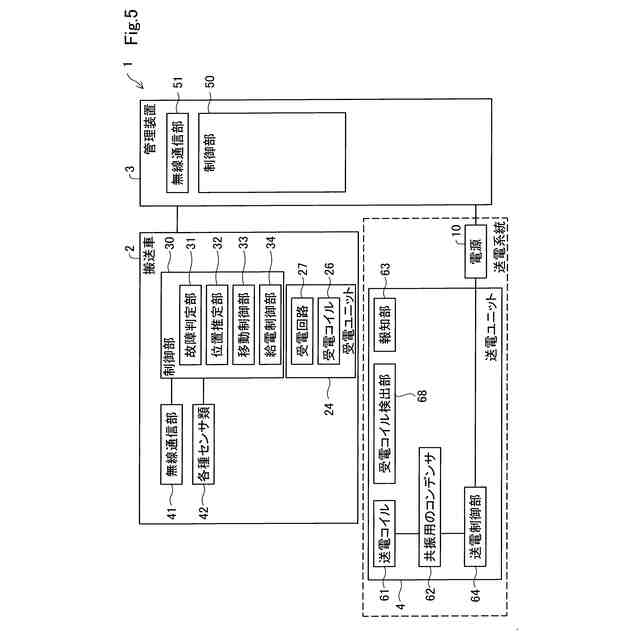
本開示の第1実施形態における、走行中給電システムの概略構成を示すブロック図である。
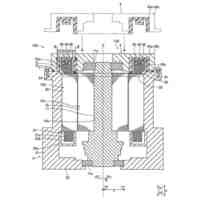
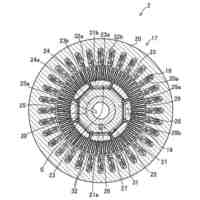
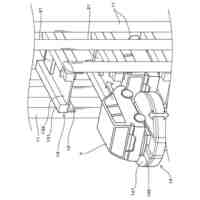
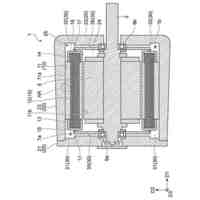
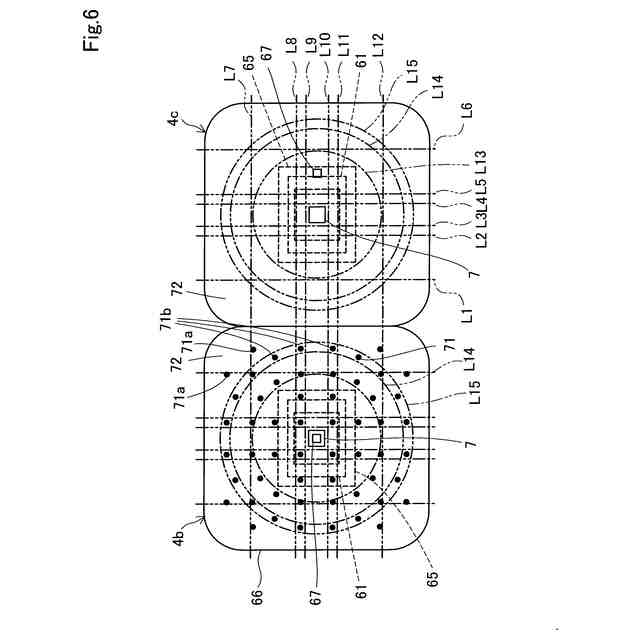
送電ユニットを模式的に示す平面図である。
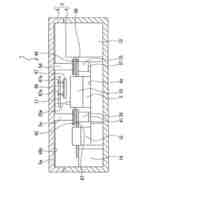
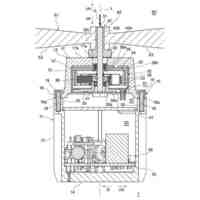
送電ユニットを模式的に示す側面図である。
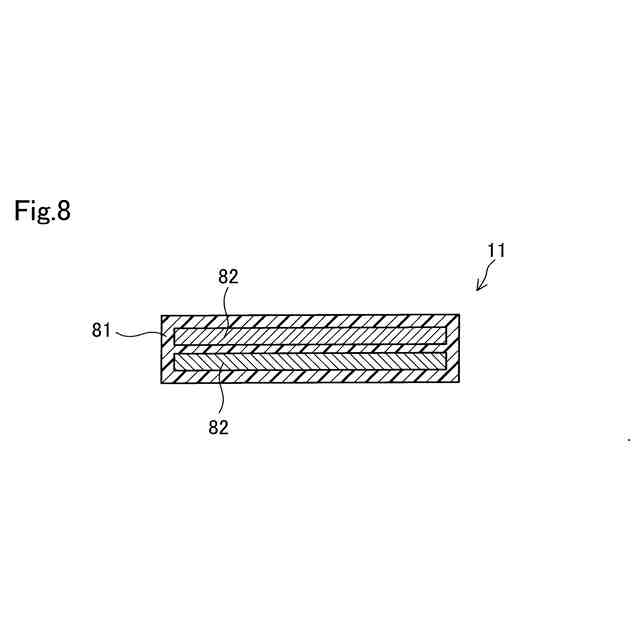
配線を模式的に示す断面図である。
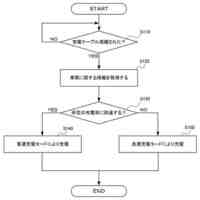
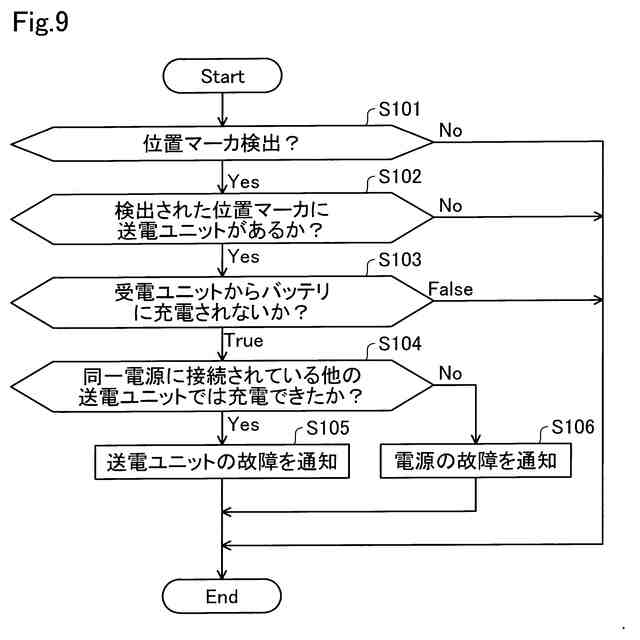
故障判定処理の処理手順を説明するフローチャートである。
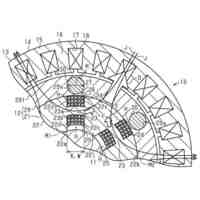
本開示の第2実施形態における、送電ユニットを模式的に示す平面図である。
本開示の第2実施形態における、送電ユニットを模式的に示す側面図である。
本開示の他の実施形態における、配線を模式的に示す断面図である。
本開示の他の実施形態における、故障判定処理の処理手順を説明するフローチャートである。
【発明を実施するための形態】
【0008】
以下、本開示の複数の実施形態について図1~図12に基づいて説明する。
【0009】
A.第1実施形態:
A1.非接触給電システム1の全体構成:
図1、図2に示すように、第1実施形態の非接触給電システム1は、例えば、倉庫内において、複数台配備された無人の搬送車2と、各搬送車2と無線通信が可能な管理装置3と、移動路面6上に設けられた複数の送電ユニット4と、を備えている。非接触給電システム1は、搬送車2の走行中に送電ユニット4から搬送車2が有する受電ユニット24(図3参照)にワイヤレスで給電することが可能なシステムである。搬送車2は、「移動体」の一例に相当する。
【0010】
作業者8は、倉庫内の例えば一端側に設けられた積載ステーション9において、搬送車2が搬送してきた棚5に対して、棚5に積載された荷物の受け取りや、棚5への荷物の受け渡しといった積載作業を行う。棚5には、任意の種類の荷物が搭載される。搬送車2は、一例として、図1において白抜きの矢印A1で示すような経路を巡回し、棚5の搬送を行う。積載ステーション9は、搬送物の積載が行われる場所であって搬送車2が停止する「停止場所」の一例に相当する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
可変磁力式同期機
1か月前
株式会社ダイヘン
電源装置
7日前
株式会社ダイヘン
電源装置
7日前
カヤバ株式会社
モータ
7日前
個人
ゼロカーボン発電循環装置
7日前
株式会社東光高岳
充電器
28日前
西芝電機株式会社
回転電機
1日前
株式会社アイシン
回転電機
1か月前
株式会社村田製作所
電源装置
28日前
帝国繊維株式会社
作業用車両
1か月前
株式会社SUBARU
充電装置
1か月前
日置電機株式会社
電流制限回路
28日前
株式会社ダイヘン
電源装置
8日前
サンデン株式会社
モータ制御装置
28日前
三菱電機株式会社
駆動回路
1か月前
株式会社正興電機製作所
充電表示器
1か月前
株式会社辰巳菱機
電力供給システム
6日前
キヤノン電子株式会社
ステッピングモータ
20日前
マツダ株式会社
モータ
1日前
マツダ株式会社
モータ
1日前
富士電機株式会社
電力変換装置
7日前
株式会社豊田自動織機
駆動装置
28日前
日動電工株式会社
鳥害防止器具
1か月前
株式会社サタケ
電動機の端子箱
28日前
オムロン株式会社
電力変換装置
1か月前
株式会社ダイヘン
給電システム
8日前
富士電機株式会社
電力変換装置
21日前
本田技研工業株式会社
回転電機
29日前
株式会社アイシン
巻線界磁型回転電機
1か月前
株式会社ダイヘン
充電システム
22日前
株式会社豊田自動織機
誘導電動機
7日前
株式会社デンソー
電気機器
1か月前
株式会社日立製作所
動力装置
21日前
日野自動車株式会社
電動機
14日前
ミネベアミツミ株式会社
電子機器
1か月前
株式会社サタケ
制御盤の扉
7日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ