TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024154721
公報種別
公開特許公報(A)
公開日
2024-10-31
出願番号
2023068707
出願日
2023-04-19
発明の名称
カバー構造及びカバー取り外し方法
出願人
株式会社不二越
代理人
個人
,
個人
主分類
B25J
19/00 20060101AFI20241024BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】ロボットが有するアームのハウジングに取り付けられたカバー部材を容易に取り外すことができるカバー構造及びカバー取り外し方法を提供する。
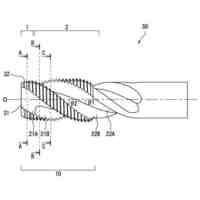
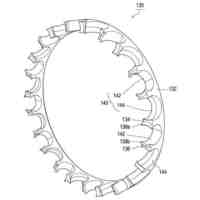
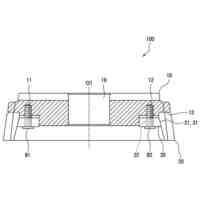
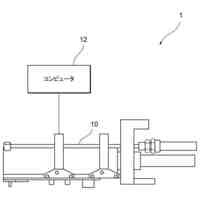
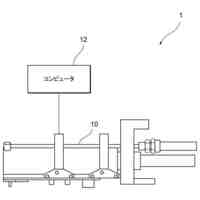
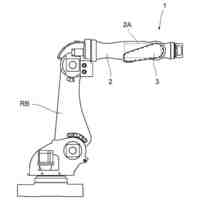
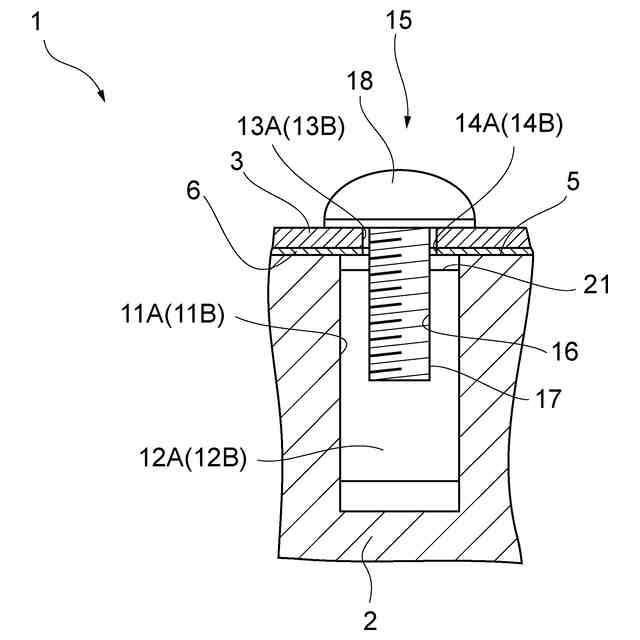
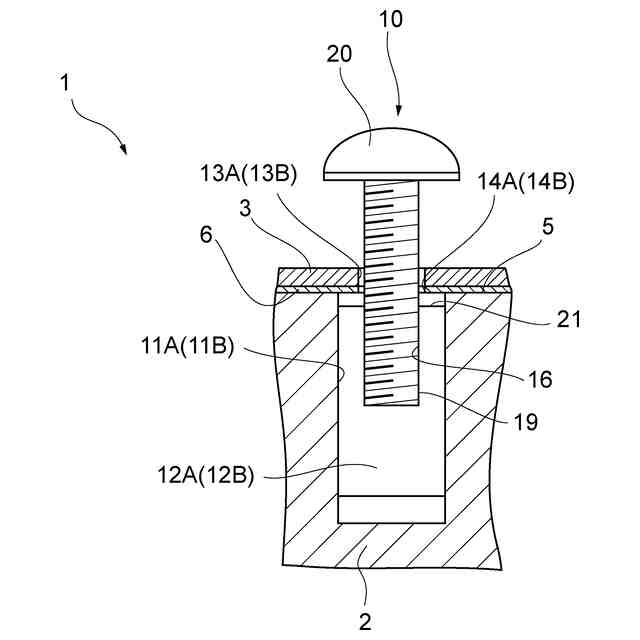
【解決手段】カバー構造1は、開口部4が設けられ、ロボットRBが有するアームの駆動機構2Aが収納されたハウジング2と、開口部4の周縁部分5に対して着脱自在に設けられ、装着状態において開口部4を覆うカバー部材3と、を備える。カバー部材3に、カバー部材3を周縁部分5に締結するためのボルトが挿入される孔であって、カバー部材3の周縁に沿って配される複数のボルト孔22と、装着状態にあるカバー部材3を駆動機構2A側から押し出すための取り外し用治具10が挿入される一つ以上の取り外し用挿入孔13A,13Bと、が形成されている。
【選択図】図1
特許請求の範囲
【請求項1】
開口部が設けられ、ロボットが有するアームの駆動機構が収納されたハウジングと、
前記開口部の周縁部分に対して着脱自在に設けられ、装着状態において前記開口部を覆うカバー部材と、を備え、
前記カバー部材に、
前記カバー部材を前記周縁部分に締結するためのボルトが挿入される孔であって、前記カバー部材の周縁に沿って配される複数の固定用挿入孔と、
前記装着状態にある前記カバー部材を前記駆動機構側から押し出すための取り外し用治具が挿入される一つ以上の取り外し用挿入孔と、
が形成されていることを特徴とするカバー構造。
続きを表示(約 650 文字)
【請求項2】
前記ハウジングは、
前記周縁部分のうち、前記取り外し用挿入孔に対応する位置に前記取り外し用挿入孔に連通するよう形成された凹部と、
前記凹部に収容され、前記カバー部材の平面視において前記取り外し用挿入孔のなす領域よりも大きい平面サイズを有し、前記取り外し用挿入孔に挿入された前記取り外し用治具と係合するように設けられる係合部材と、
を備えることを特徴とする請求項1に記載のカバー構造。
【請求項3】
前記取り外し用挿入孔は、前記カバー部材の主面において短手方向に沿って重心を通過する第一の仮想線によって分割される二つの領域に、1つずつ形成されることを特徴とする請求項1又は2に記載のカバー構造。
【請求項4】
前記取り外し用挿入孔は、前記カバー部材の前記装着状態において、当該取り外し用挿入孔を封止する封止用治具が挿入され、前記カバー部材を前記駆動機構側から押し出す際に、当該封止用治具が外された状態で、前記取り外し用治具が挿入されることを特徴とする請求項1に記載のカバー構造。
【請求項5】
請求項1のカバー構造において、
前記取り外し用挿入孔に対して前記治具を挿入する工程と、
前記複数の固定用挿入孔に挿入されたすべての前記ボルトが取り外された状態にて、挿入した前記治具を引っ張りながら前記カバー部材を前記駆動機構側から押し出す工程と、
を備えることを特徴とするカバー取り外し方法。
発明の詳細な説明
【技術分野】
【0001】
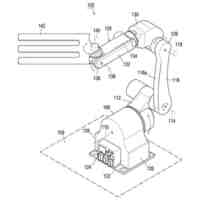
本発明は、ロボットが有するアームに適用されるカバー構造及びカバー取り外し方法に関する。
続きを表示(約 1,300 文字)
【背景技術】
【0002】
例えば、ロボット分野において、ロボットが有するアームの駆動機構に対する保守又は点検を行うためのカバー構造が知られている。
【0003】
特許文献1には、ハウジングの開口部の周縁部分には、複数のボルト孔が形成され、カバー部材及びシール部材には、このボルト孔に対応する貫通孔が形成され、ボルトを当該貫通孔に挿入するとともに当該ボルト孔に螺合させることで、開口部にカバー部材を固定するカバー構造が開示されている。
【先行技術文献】
【特許文献】
【0004】
特許第5970921号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ところで、何らかの理由でカバー部材とハウジングの間の密着性が高くなり、すべてのボルトを取り外した後であっても、カバー部材がハウジングに固着していることがあり得る。例えば、特許文献1に開示されるカバー構造では、カバー部材の外側(つまり、正面又は側面)からカバー部材を把持しにくく、カバー部材を容易に取り外せないという問題がある。
【0006】
上記問題に鑑み、本発明は、ロボットが有するアームのハウジングに取り付けられたカバー部材を容易に取り外すことができる、カバー構造及びカバー取り外し方法を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明のカバー構造は、開口部が設けられ、ロボットが有するアームの駆動機構が収納されたハウジングと、前記開口部の周縁部分に対して着脱自在に設けられ、装着状態において前記開口部を覆うカバー部材と、を備え、前記カバー部材に、前記カバー部材を前記周縁部分に締結するためのボルトが挿入される孔であって、前記カバー部材の周縁に沿って配される複数の固定用挿入孔と、前記装着状態にある前記カバー部材を前記駆動機構側から押し出すための取り外し用治具が挿入される一つ以上の取り外し用挿入孔と、が形成されている。
【0008】
また、前記ハウジングは、前記周縁部分のうち、前記取り外し用挿入孔に対応する位置に前記取り外し用挿入孔に連通するよう形成された凹部と、前記凹部に収容され、前記カバー部材の平面視において前記取り外し用挿入孔のなす領域よりも大きい平面サイズを有し、前記取り外し用挿入孔に挿入された前記取り外し用治具と係合するように設けられる係合部材と、を備える。
【0009】
また、前記取り外し用挿入孔は、前記カバー部材の主面において短手方向に沿って重心を通過する第一の仮想線によって分割される二つの領域に、1つずつ形成される。
【0010】
また、前記取り外し用挿入孔は、前記カバー部材の前記装着状態において、当該取り外し用挿入孔を封止する封止用治具が挿入され、前記カバー部材を前記駆動機構側から押し出す際に、当該封止用治具が外された状態で、前記取り外し用治具が挿入される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社不二越
タップ
10日前
株式会社不二越
油圧装置
10日前
株式会社不二越
回転継手
1か月前
株式会社不二越
歯車研削盤
3日前
株式会社不二越
車軸軸受装置
2日前
株式会社不二越
車軸軸受装置
2日前
株式会社不二越
電磁比例減圧弁
10日前
株式会社不二越
波動減速機用軸受
23日前
株式会社不二越
電食防止転がり軸受
1か月前
株式会社不二越
垂直多関節ロボット
1か月前
株式会社不二越
電磁比例弁の制御方法
1か月前
株式会社不二越
協働ロボットシステム
4日前
株式会社不二越
転造加工用鋼製平ダイス
23日前
株式会社不二越
建設機械用旋回ブレーキ装置
3日前
株式会社不二越
刃先交換式スカイビングカッタ
1か月前
株式会社不二越
斜板式可変容量型ピストンポンプ
23日前
株式会社不二越
斜板式可変容量型ピストンポンプ
1か月前
株式会社不二越
X線回析測定装置及びプログラム
1か月前
株式会社不二越
X線回析測定装置及びプログラム
1か月前
株式会社不二越
歯車加工ツールおよび歯車加工方法
3日前
株式会社不二越
合金鋼およびそれを用いた機械部品
1か月前
株式会社不二越
カバー構造及びカバー取り外し方法
1か月前
株式会社不二越
合金鋼、電食防止部品およびその製造方法
1か月前
株式会社不二越
合金鋼、電食防止部品およびその製造方法
3日前
株式会社不二越
合金鋼、それを用いた電食防止部品およびその製造方法
1か月前
株式会社不二越
加工条件シミュレーション装置、ギヤスカイビング加工装置および加工条件シミュレーション方法
1か月前
個人
木製ハンマー
3か月前
個人
関節モジュール
3か月前
個人
寸切りボルト回し
2か月前
個人
スロットルトリガー
3か月前
日東精工株式会社
搬送装置
7か月前
中国電力株式会社
腰袋
6か月前
太陽工業株式会社
チャック装置
2か月前
コクヨ株式会社
補助器具
2か月前
日東工器株式会社
動力工具
3か月前
日東工器株式会社
動力工具
3か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ