TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024146157
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058893
出願日
2023-03-31
発明の名称
駐車支援装置
出願人
株式会社アイシン
代理人
弁理士法人酒井国際特許事務所
主分類
B60W
30/06 20060101AFI20241004BHJP(車両一般)
要約
【課題】駐車支援中で目標速度が一定のときに自車両の不要な加減速を抑制する。
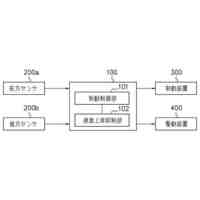
【解決手段】実施形態の駐車支援装置は、自車両の駐車の目標位置へ前記自車両を移動させるための目標速度を算出する目標速度制御部と、前記自車両の前記目標速度と実速度の偏差に基づいて目標加速度を算出する速度フィードバック制御部と、前記目標速度が一定のときに、前記目標加速度を、絶対値が小さくなるように補正する補正処理部と、前記目標加速度に基づいて前記自車両の制駆動力を制御する車両制御部と、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
自車両の駐車の目標位置へ前記自車両を移動させるための目標速度を算出する目標速度制御部と、
前記自車両の前記目標速度と実速度の偏差に基づいて目標加速度を算出する速度フィードバック制御部と、
前記目標速度が一定のときに、前記目標加速度を、絶対値が小さくなるように補正する補正処理部と、
前記目標加速度に基づいて前記自車両の制駆動力を制御する車両制御部と、を備える駐車支援装置。
続きを表示(約 340 文字)
【請求項2】
前記補正処理部は、
前記目標速度が一定のときの不感帯処理モードにおいて、
前記目標加速度が予め定められた不感帯の範囲内に入っている場合には、前記目標加速度を、0に補正し、
前記目標加速度が前記不感帯の範囲内に入っていない場合には、前記目標加速度を、絶対値が所定のオフセット値だけ減るように補正する、請求項1に記載の駐車支援装置。
【請求項3】
前記補正処理部は、前記目標速度が一定のときの不感帯処理モードから、前記目標速度が変化して、前記目標速度が一定ではないときの通常モードに切り替わる場合に、前記目標加速度の変化率が予め定められた変化率上限値を超えないように前記目標加速度を補正する、請求項1に記載の駐車支援装置。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、駐車支援装置に関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
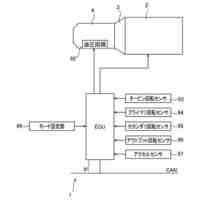
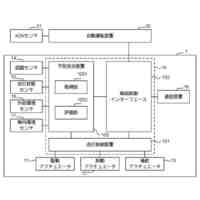
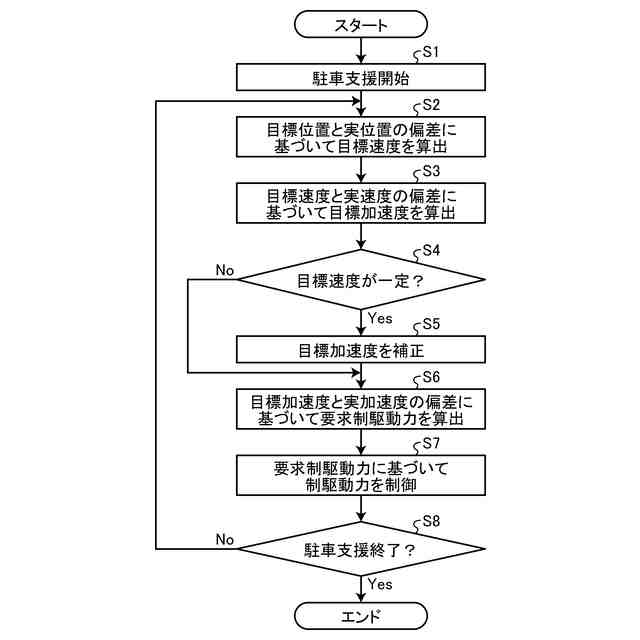
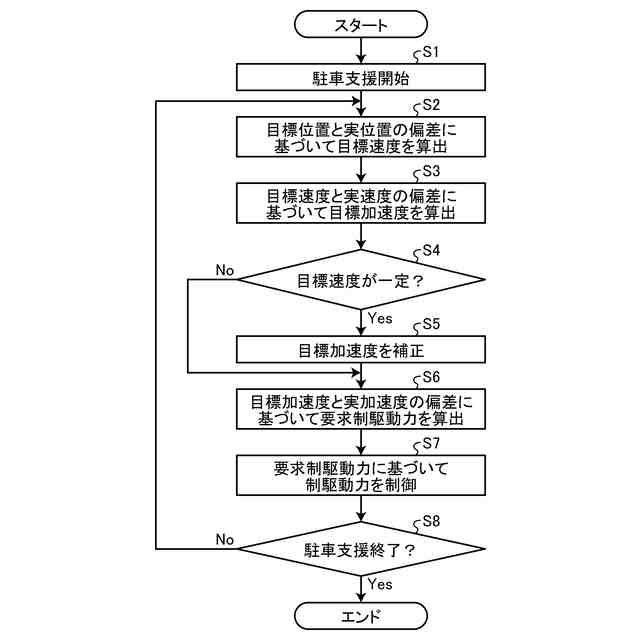
従来から、車両(乗用車など)の駐車支援装置が研究開発され、使用されている。駐車支援装置では、例えば、ECU(Electronic Control Unit)によって制駆動力(制動力と駆動力)制御や操舵制御を行うことで、駐車を支援する。制駆動力制御では、例えば、FB(Feedback)制御を用いる。具体的には、例えば、まず、自車両の駐車目標位置と実位置の偏差に基づいて目標速度を算出する。次に、目標速度と実速度の偏差に基づいて目標加速度を算出する。次に、目標加速度と実加速度の偏差に基づいて要求制駆動力を算出する。そして、要求制駆動力に基づいて自車両の制駆動力を制御する。
【先行技術文献】
【特許文献】
【0003】
特開2017-30482号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、上述の従来技術では、例えば、路面状況(段差、低摩擦路面など)や制駆動力装置(エンジン、ブレーキなど)の経年変化などの諸要因により、自車両に不要な加減速が発生することがある。そして、特に、目標速度が一定のときには、不要な加減速が発生すると、乗員が乗り心地の悪化を感じやすいので、改善が望まれている。
【0005】
そこで、本発明は、上記事情に鑑みてなされたものであり、駐車支援中で目標速度が一定のときに自車両の不要な加減速を抑制することができる駐車支援装置を提供することを課題とする。
【課題を解決するための手段】
【0006】
上記課題を解決するため、実施形態の駐車支援装置は、自車両の駐車の目標位置へ前記自車両を移動させるための目標速度を算出する目標速度制御部と、前記自車両の前記目標速度と実速度の偏差に基づいて目標加速度を算出する速度フィードバック制御部と、前記目標速度が一定のときに、前記目標加速度を、絶対値が小さくなるように補正する補正処理部と、前記目標加速度に基づいて前記自車両の制駆動力を制御する車両制御部と、を備える。
【0007】
この構成により、目標速度が一定のときに、目標加速度を絶対値が小さくなるように補正することで、不要な加減速を抑制することができる。
【0008】
また、実施形態の駐車支援装置において、前記補正処理部は、前記目標速度が一定のときの不感帯処理モードにおいて、前記目標加速度が予め定められた不感帯の範囲内に入っている場合には、前記目標加速度を、0に補正し、前記目標加速度が前記不感帯の範囲内に入っていない場合には、前記目標加速度を、絶対値が所定のオフセット値だけ減るように補正する。
【0009】
この構成により、目標加速度が不感帯の範囲内に入っている場合には目標加速度を0に補正する。また、目標加速度が不感帯の範囲内に入っていない場合には目標加速度を絶対値が所定のオフセット値だけ減るように補正する。これにより、不要な加減速を抑制するとともに、目標加速度に対する実加速度の追従性の大幅な低下を回避することができる。
【0010】
また、実施形態の駐車支援装置において、前記補正処理部は、前記目標速度が一定のときの不感帯処理モードから、前記目標速度が変化して、前記目標速度が一定ではないときの通常モードに切り替わる場合に、前記目標加速度の変化率が予め定められた変化率上限値を超えないように前記目標加速度を補正する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
電池交換式自動車
2か月前
個人
空気圧調節式ホイール。
15日前
個人
移動手段のミラーカバー。
2か月前
日本精機株式会社
車外表示装置
7日前
日本精機株式会社
運転支援装置
1か月前
東レ株式会社
車両用エアバッグ
28日前
個人
連結式、キャンピングカー
2か月前
日本精機株式会社
表示システム
1か月前
株式会社SUBARU
車両
8日前
ダイハツ工業株式会社
車両
14日前
ダイハツ工業株式会社
車両
15日前
エムケー精工株式会社
車両処理装置
18日前
日本化薬株式会社
ガス発生器
7日前
ダイハツ工業株式会社
レバー
2か月前
株式会社コーワ
フィルター清掃装置
3日前
日本化薬株式会社
ガス発生器
2か月前
スズキ株式会社
車両制御装置
1か月前
豊田合成株式会社
車両
28日前
豊田合成株式会社
車両
28日前
ダイハツ工業株式会社
分解構造
2か月前
株式会社小糸製作所
車両用灯具
2か月前
豊田合成株式会社
乗員保護装置
8日前
ダイハツ工業株式会社
搭載構造
21日前
三菱マヒンドラ農機株式会社
作業車両
2か月前
個人
ブレーキ踏み間違い救済システム
28日前
ダイハツ工業株式会社
搭載構造
21日前
豊田合成株式会社
乗員保護装置
24日前
株式会社セイワ
ドリンクホルダー
3日前
豊田合成株式会社
歩行者保護装置
2か月前
豊田合成株式会社
歩行者保護装置
2か月前
トヨタ自動車株式会社
車両
1か月前
トヨタ自動車株式会社
車両
1か月前
個人
加速抑制機能付アクセルペダル装置
1か月前
トヨタ自動車株式会社
車両
1か月前
株式会社豊田自動織機
車両
14日前
株式会社デンソー
清掃装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ