TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024145756
公報種別
公開特許公報(A)
公開日
2024-10-15
出願番号
2023058241
出願日
2023-03-31
発明の名称
駐車支援システム
出願人
株式会社アイシン
代理人
弁理士法人R&C
主分類
B60W
30/06 20060101AFI20241004BHJP(車両一般)
要約
【課題】利便性を確保しつつ、車両を適切に駐車スペースに移動させることができる駐車支援システムを提供する。
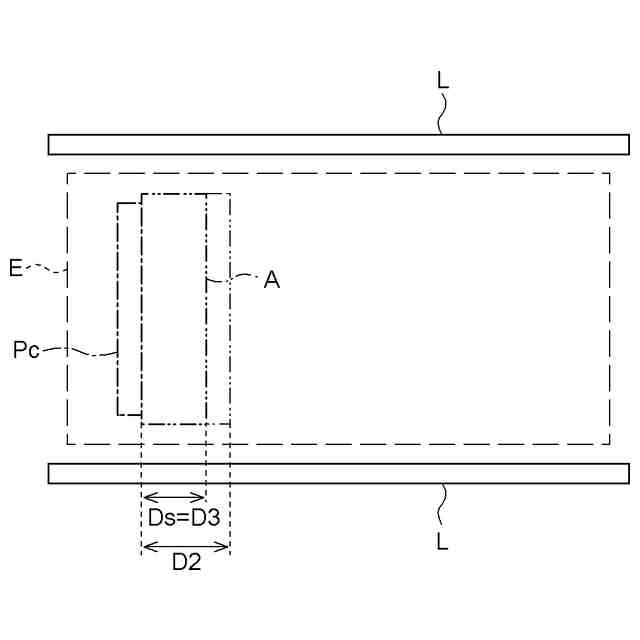
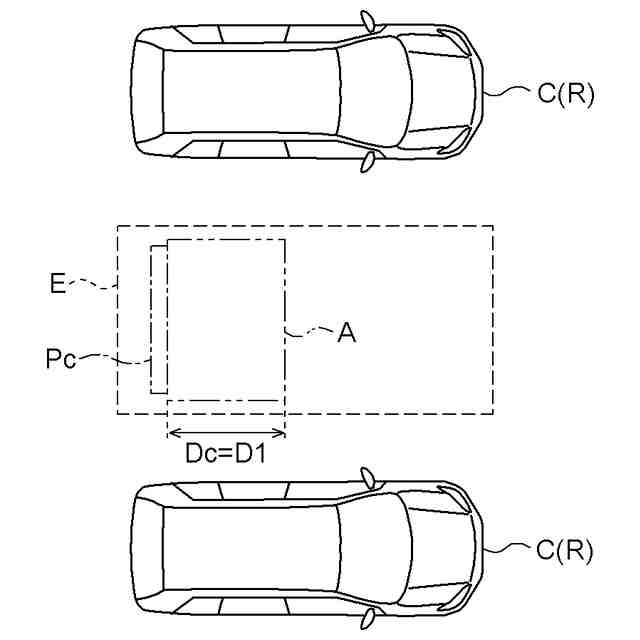
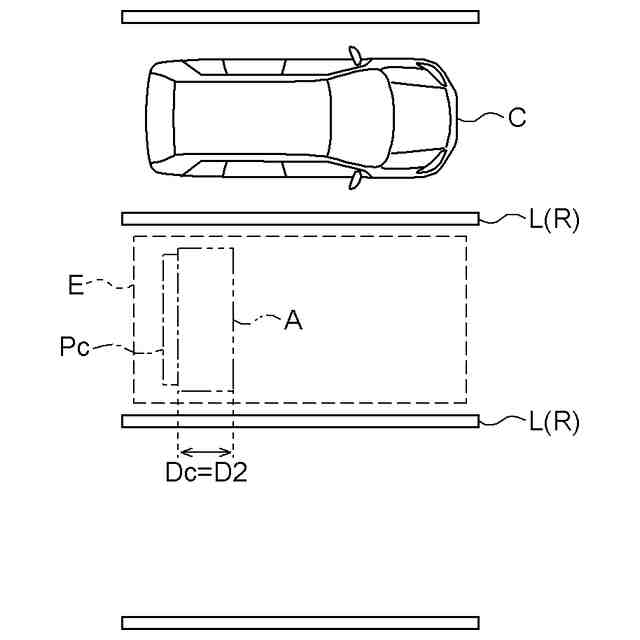
【解決手段】駐車支援システムは、車両制御部と、輪留め位置推定部と、誤差量推定部とを備える。車両制御部は、輪留め位置推定部により推定した推定輪留め位置(Pc)に基づいて接触想定エリア(A)を設定し、接触想定エリア(A)内では接触準備速度で車両を走行させる停止前制御を実行する。車両制御部は、誤差量推定部により推定された推定誤差量が小さくなるに従って接触想定エリア(A)を小さくする。
【選択図】図9
特許請求の範囲
【請求項1】
車輪に作用する駆動力と制動力とを制御して、前記車輪を備えた車両を駐車スペースへ移動させるための車両制御を行う車両制御部を備えた駐車支援システムであって、
前記駐車スペースにおける輪留めの位置を推定する輪留め位置推定部と、
前記車両の位置認識システムの誤差量を推定する誤差量推定部と、をさらに備え、
前記車両制御部は、前記輪留め位置推定部により推定した前記輪留めの位置である推定輪留め位置に基づいて、前記推定輪留め位置よりも前記車両の側に、前記車輪が前記輪留めに接触する可能性があるエリアである接触想定エリアを設定し、前記接触想定エリア内では、予め設定された接触準備速度で前記車両を走行させる停止前制御を実行し、
前記車両制御部は、前記誤差量推定部により推定された前記誤差量である推定誤差量が小さくなるに従って前記接触想定エリアを小さくする、駐車支援システム。
続きを表示(約 560 文字)
【請求項2】
前記車両の周辺を撮影して取得した画像の画像認識を行う画像認識部をさらに備え、
前記車両制御部は、前記画像認識部により認識された認識対象物と、前記認識対象物と前記輪留めとの予め規定された位置関係とに基づいて、前記輪留めに接触する可能性があるエリアの大きさを演算する演算処理を行い、
前記車両制御部は、前記演算処理の結果と前記推定誤差量とを合わせた大きさに基づいて前記接触想定エリアの大きさを設定する、請求項1に記載の駐車支援システム。
【請求項3】
前記車両の周辺を撮影して取得した画像の画像認識を行う画像認識部と、
前記車両の走行距離を算出する走行距離算出部と、
前記画像認識部による前記画像認識の結果に基づいて認識対象物と前記車両との位置関係を判定する対象物判定部と、を備え、
前記誤差量推定部は、前記画像認識部、前記走行距離算出部、及び前記対象物判定部のそれぞれの誤差を積算して前記推定誤差量を算出する、請求項1又は2に記載の駐車支援システム。
【請求項4】
前記車両制御部は、前記接触想定エリア内では、前記車輪に作用させる駆動力を、予め設定された接触準備駆動力以下に制限する、請求項1又は2に記載の駐車支援システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両を駐車スペースへ移動させるための車両制御を行う駐車支援システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
特開2022-72962号公報(特許文献1)には、車輪に作用する駆動力及び制動力を制御して車両を駐車スペースへ移動させるための車両制御を行う駐車支援システムが開示されている。特許文献1の駐車支援システムは、車両を駐車スペースへ移動させるための移動経路を設定し、目標位置までの残距離に応じて車両の速度を段階的に低下させ、車両が目標位置に到達するか車輪が輪留めに接触した場合に、駐車完了として車両を停止させる。
【0003】
特許文献1の駐車支援システムでは、車両が駐車スペースへ入り始めた時点から速度を低下させ、その後、操舵角がゼロとなった時点からさらに速度を低下させる。これにより、車両が勢い良く輪留めに到達するのを防止することができるとされている。
【先行技術文献】
【特許文献】
【0004】
特開2022-72962号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、駐車シーンによってはかなり早い段階から操舵角がゼロとなる場面も想定される。このような場合に、操舵角ゼロの時点から車両の速度を大きく低下させてしまうと、極低車速で走行する距離及び時間が長くなり、利便性が低下する恐れがある。
【0006】
そこで、利便性を確保しつつ、車両を適切に駐車スペースに移動させることができる駐車支援システムの実現が望まれる。
【課題を解決するための手段】
【0007】
本開示に係る駐車支援システムは、
車輪に作用する駆動力と制動力とを制御して、前記車輪を備えた車両を駐車スペースへ移動させるための車両制御を行う車両制御部を備えた駐車支援システムであって、
前記駐車スペースにおける輪留めの位置を推定する輪留め位置推定部と、
前記車両の位置認識システムの誤差量を推定する誤差量推定部と、をさらに備え、
前記車両制御部は、前記輪留め位置推定部により推定した前記輪留めの位置である推定輪留め位置に基づいて、前記推定輪留め位置よりも前記車両の側に、前記車輪が前記輪留めに接触する可能性があるエリアである接触想定エリアを設定し、前記接触想定エリア内では、予め設定された接触準備速度で前記車両を走行させる停止前制御を実行し、
前記車両制御部は、前記誤差量推定部により推定された前記誤差量である推定誤差量が小さくなるに従って前記接触想定エリアを小さくする。
【0008】
この構成によれば、推定輪留め位置に基づいて設定される接触想定エリア内で停止前制御を実行することにより、接触準備速度で車両を走行させて、車両が勢い良く輪留めに到達するのを回避しやすくできる。その際、車両の位置認識システムの推定誤差量が小さくなるに従って接触想定エリアを小さくすることで、車両が低車速で走行する距離が徒に長くなるのを回避することができる。よって、利便性を確保しつつ、車両を適切に駐車スペースに移動させることができる駐車支援システムを提供することができる。
【0009】
本開示に係る技術のさらなる特徴と利点は、図面を参照して記述する以下の例示的かつ非限定的な実施形態の説明によってより明確になるであろう。
【図面の簡単な説明】
【0010】
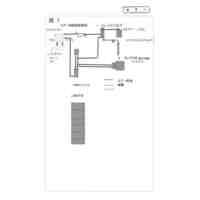
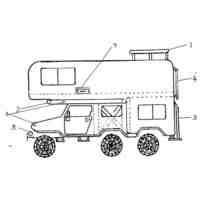
駐車支援の一例を示す説明図
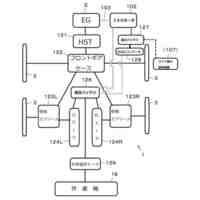
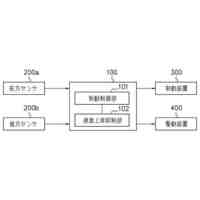
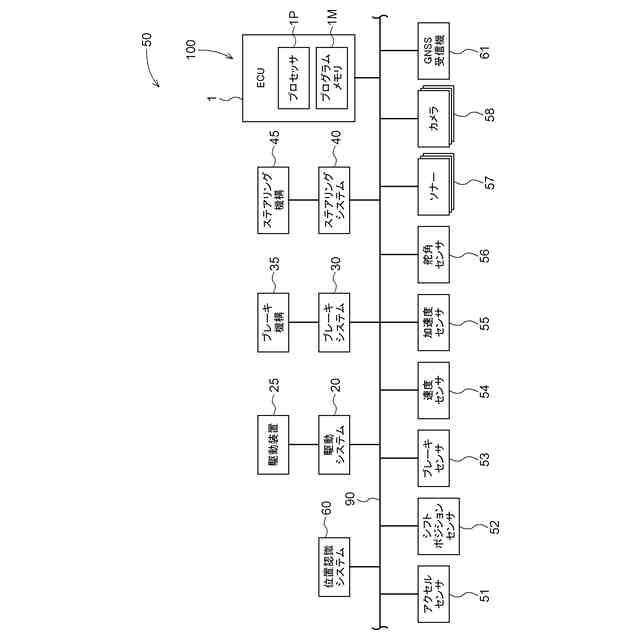
駐車支援システムを含む車両のシステム構成の一例を示す模式的ブロック図
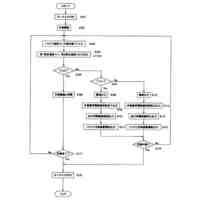
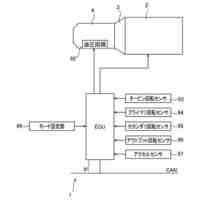
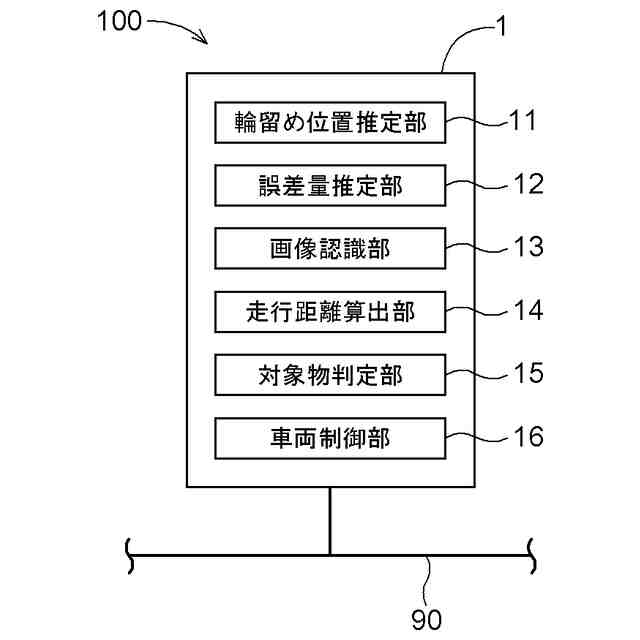
駐車支援システムの機能ブロック図
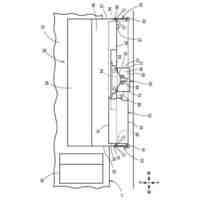
接触想定エリアの設定方法を示す模式図
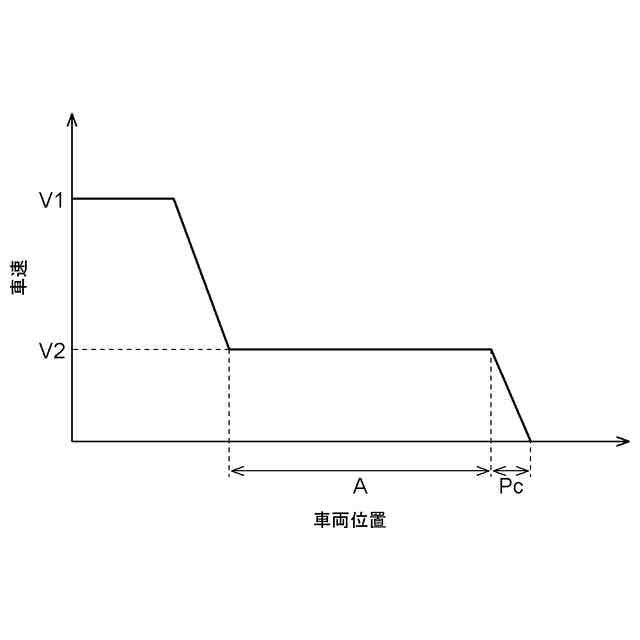
駐車支援中の車両の位置に応じた車速変化を示すグラフ
駐車支援中の車両の位置に応じた駆動力変化を示すグラフ
接触想定エリアの大きさ設定の一例を示す模式図
接触想定エリアの大きさ設定の一例を示す模式図
接触想定エリアの大きさ設定の一例を示す模式図
接触想定エリアの大きさ設定の一例を示す模式図
接触想定エリアの大きさ設定の一例を示す模式図
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
車両用エアー傘
3か月前
個人
電池交換式自動車
2か月前
個人
自動車盗難防止装置
3か月前
個人
荷台雨除け装置
3か月前
個人
空気圧調節式ホイール。
15日前
個人
移動手段のミラーカバー。
2か月前
個人
全自動解除式シートベルト
4か月前
日本精機株式会社
運転支援装置
1か月前
個人
連結式、キャンピングカー
2か月前
日本精機株式会社
表示システム
1か月前
日本精機株式会社
車外表示装置
7日前
東レ株式会社
車両用エアバッグ
28日前
株式会社豊田自動織機
電動車両
4か月前
井関農機株式会社
作業車両
3か月前
井関農機株式会社
作業車両
3か月前
株式会社SUBARU
車両
8日前
ダイハツ工業株式会社
車両
15日前
ダイハツ工業株式会社
車両
14日前
個人
車両の座席装置
3か月前
井関農機株式会社
作業車両
3か月前
エムケー精工株式会社
車両処理装置
18日前
日本化薬株式会社
ガス発生器
2か月前
ダイハツ工業株式会社
レバー
2か月前
アピオ株式会社
荷物用支持具
2か月前
豊田合成株式会社
車両
28日前
株式会社コーワ
フィルター清掃装置
3か月前
株式会社コーワ
フィルター清掃装置
3日前
個人
視認ペダル操作システム
4か月前
個人
セパレート型キャンピングカー
3か月前
株式会社コーワ
フィルター清掃装置
4か月前
スズキ株式会社
車両制御装置
1か月前
豊田合成株式会社
車両
28日前
日本化薬株式会社
ガス発生器
7日前
個人
テーブル付きハンドルガード具
3か月前
豊田合成株式会社
乗員保護装置
8日前
ダイハツ工業株式会社
分解構造
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ