TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024142217
公報種別
公開特許公報(A)
公開日
2024-10-10
出願番号
2023054290
出願日
2023-03-29
発明の名称
音響測位装置、方法及びプログラム
出願人
KDDI株式会社
代理人
個人
,
個人
主分類
G01S
5/22 20060101AFI20241003BHJP(測定;試験)
要約
【課題】反射波などの妨害波がある状況下でも、計算量の軽い反復勾配法を用いて精度よくSSBL方式の計算を実現し、正確な測位を可能にする。
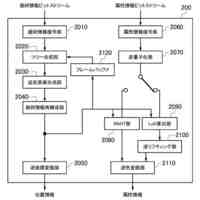
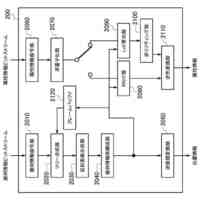
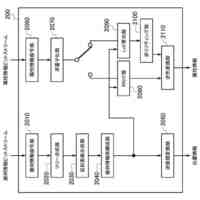
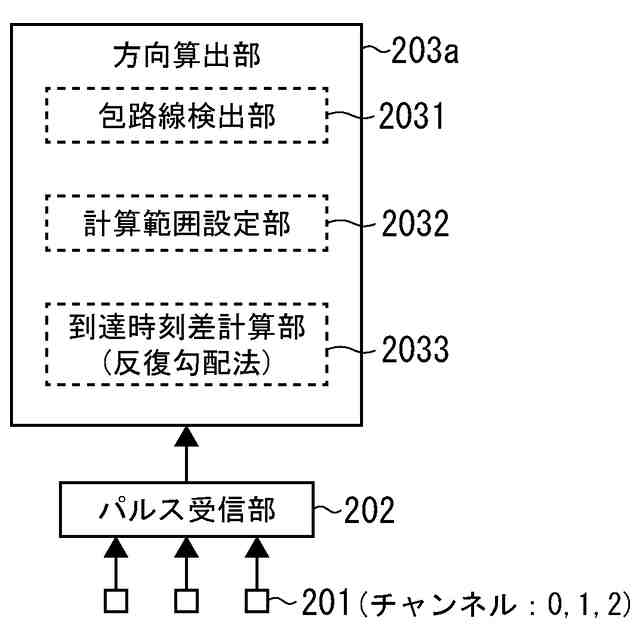
【解決手段】包絡線検出部2031は、各ハイドロフォン201が受信した音響信号に対してパルス圧縮処理、二乗処理及び低域フィルタ処理の各処理を実施して包絡線化する。計算範囲設定部2032は、各チャンネルの包絡線における測位パルス部分Aの前方側の一部を、反復勾配法に適用して到達時刻差を求める計算範囲に設定する。到達時刻差計算部2033は、チャンネル0の計算範囲ΔT0とチャンネル1の計算範囲ΔT1との信号同士で反復勾配法を適用することで、チャンネル0と1の間の受信信号の到達時刻差Δd1を得る。同様に、チャンネル0の計算範囲ΔT0とチャンネル2の計算範囲ΔT2との信号同士で反復勾配法を適用することで、チャンネル0と2の間の受信信号の到達時刻差Δd2を得る。
【選択図】図3
特許請求の範囲
【請求項1】
水中の物体が送信した測位パルスを含む音響信号を複数のハイドロフォンで受信し、各測位パルスの到達時刻差に基づいて物体の位置を測位する音響測位装置において、
各音響信号を処理して包絡線化する手段と、
各包絡線の測位パルス部分の前方側の一部同士の到達時刻差を勾配法を用いて計算する手段とを具備したことを特徴とする音響測位装置。
続きを表示(約 980 文字)
【請求項2】
勾配法の計算範囲を測位パルス部分の一部に設定する手段を具備し、
前記設定する手段は、前記測位パルス部分のピーク位置近傍以前の部分を計算範囲に設定することを特徴とする請求項1に記載の音響測位装置。
【請求項3】
勾配法の計算範囲を測位パルス部分の一部に設定する手段を具備し、
前記設定する手段は、前記測位パルス部分の略中央位置近傍以前の部分を計算範囲に設定することを特徴とする請求項1に記載の音響測位装置。
【請求項4】
前記各包絡線の測位パルス部分に後行する妨害波部分の波形パターンを検出する手段と、
勾配法の計算範囲を測位パルス部分の一部に設定する手段とを具備し、
前記設定する手段は、前記測位パルス部分の、前記波形パターンの検出結果に応じた先方部分を計算範囲に設定することを特徴とする請求項1に記載の音響測位装置。
【請求項5】
前記波形パターンを検出する手段は前記妨害波部分のピーク値を検出し、
前記設定する手段は、前記計算範囲を前記ピーク値が大きいほどより前方側に設定することを特徴とする請求項4に記載の音響測位装置。
【請求項6】
前記波形パターンを検出する手段は前記測位パルス部分と妨害波部分との間隔を検出し、
前記設定する手段は、前記計算範囲を前記間隔が短いほどより前方側に設定することを特徴とする請求項4に記載の音響測位装置。
【請求項7】
前記計算する手段は、前記到達時刻差を反復勾配法を用いて計算することを特徴とする請求項1ないし6のいずれかに記載の音響測位装置。
【請求項8】
前記計算する手段はデータを間引いて反復勾配法の計算を行うことを特徴とする請求項7に記載の音響測位装置。
【請求項9】
前記妨害波部分が測位パルスの反射波に相当する反射波部分であることを特徴とする請求項4ないし6のいずれかに記載の音響測位装置。
【請求項10】
前記包絡線化する手段は、前記音響信号に対してパルス圧縮処理、二乗処理及び低域フィルタ処理を実施することを特徴とする請求項1ないし6のいずれかに記載の音響測位装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
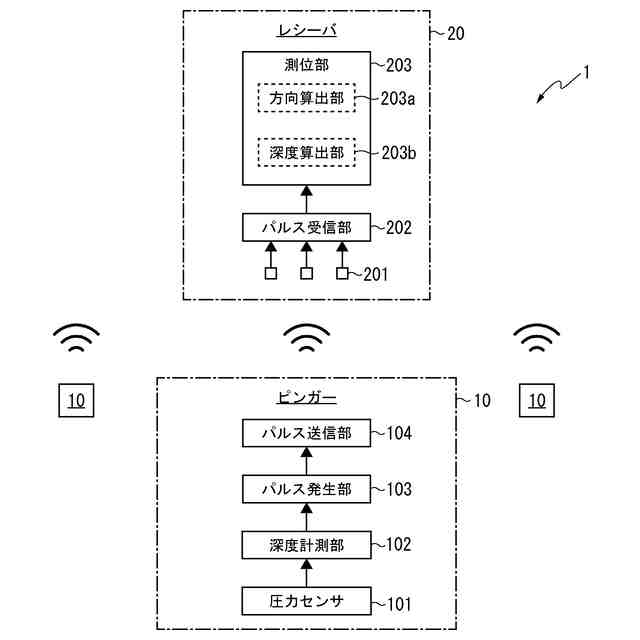
本発明は、ピンガーの位置又は当該ピンガーを搭載した物体の位置を音響信号に基づいて測位する音響測位装置、方法及びプログラムに係り、特に、ピンガーが送信した音響信号を複数のレシーバで受信し、遅延差を勾配法により計算することで測位する音響測位装置、方法及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
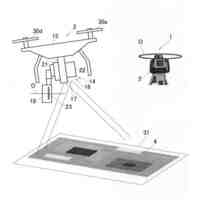
非特許文献1には、図13に示すように、空中ドローンが水中ドローンを抱えて飛び、目的水域にて着水後、水中ドローンを分離・潜航させ、作業終了後に回収・離水する「水空合体ドローン」が開示されている。
【0003】
水空合体ドローンの一つの特徴として、水中ドローンに装着した発信器(ピンガー)から音響信号を発信し、空中ドローン側の水中マイク(ハイドロフォン)で受信、それを自動解析して水中ドローンの位置を算出する「音響測位」の技術を搭載していることが挙げられる。音響測位技術は、例えば非特許文献2のP.236-245に開示されている。
【0004】
水空合体ドローンでは音響測位にSSBL(Super Short Base Line)方式が採用されており、3個以上のハイドロフォンで受信した音響信号の遅延差をまず求め、そこから発信元の位置を計算する。
【0005】
非特許文献3には、水空合体ドローンに搭載されているSSBL音響測位方式の事例が開示されている。SSBL音響測位方式では、ある一定期間(例えば、1秒間)内に音響パルスが1組発射される。1組のパルスは一定個数(例えば、2個のパルス)からなり、これらをハイドロフォンで受信して信号処理することにより測位を行う。
【先行技術文献】
【特許文献】
【0006】
特願2022-145518号
特願2022-195588号
【非特許文献】
【0007】
KDDI/KDDI総合研究所/プロドローン、ニュースリリース「世界初の水空合体ドローン、遠隔での水中撮影に成功~船を出さずに洋上風力発電設備の安全・効率的な点検を実施~」,2021年12月14日https://news.kddi.com/kddi/corporate/newsrelease/2021/12/14/5593.html
海洋音響学会「海洋音響の基礎と応用」,成山堂書店,P.236-245
川田, 西谷, 小島:"水空合体ドローンの音響測位システム", 海洋音響学会研究発表会講演論文集, No. 22-2, pp. 3-4 (2022)
川田、西谷、小島:"水空合体ドローンのための音響測位システム"、信学技報、EA2022-73, pp.72-77 (2022年12月)
【発明の概要】
【発明が解決しようとする課題】
【0008】
相互相関関数を計算するには、通常、フーリエ変換(FFT)を施す必要がある。この処理は周知のとおり計算量が多いが、水空合体ドローンでは空中ドローンに取り付けるレシーバ内でそれらの信号処理を行う必要がある。今後、多数の水中ドローンやダイバーの測位を同時に実施するようになることを想定した場合、その数の分のFFT処理を実施するのは非力なCPUでは間に合わなくなる可能性が高い。
【0009】
非特許文献4には、相互相関関数の計算よりも処理の軽い反復勾配法を使用した測位方法が開示されており、基本性能の確認がすでに計算機シミュレーションにより実施されている。
【0010】
しかしながら、受信した音響信号は図14に示すように計測対象の測位パルスのみであるとは限らず、実環境では水面等での音波の反射により、図15に示すように測位パルス部分Aに遅れて反射波部分Bが受信される場合がある。更に、反射波部分Bの到達時間が早いと、図16に示すように測位パルス部分Aの後方部分と反射波部分Bの前方部分とが重なり、重畳波Cとして受信される場合もある。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
KDDI株式会社
サーバ装置、制御方法及びプログラム
10日前
KDDI株式会社
サーバ装置、制御方法及びプログラム
10日前
KDDI株式会社
予測システム、プログラム及び予測方法
10日前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
今日
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
今日
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
今日
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
今日
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
今日
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
今日
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
今日
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
今日
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
今日
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
今日
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
今日
KDDI株式会社
情報処理装置、情報処理方法、及びプログラム
10日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
今日
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
今日
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
今日
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
今日
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
今日
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
今日
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
今日
KDDI株式会社
安全性評価装置、安全性評価方法及び安全性評価プログラム
10日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
8日前
KDDI株式会社
物体光逆量子化装置、物体光量子化装置、物体光逆量子化方法、物体光量子化方法及びプログラム
今日
株式会社トプコン
測量装置
8日前
株式会社アトラス
計量容器
7日前
株式会社トプコン
測量装置
今日
株式会社チノー
気体流量調整機構
10日前
株式会社チノー
気体流量調整機構
10日前
アズビル株式会社
圧力センサ
10日前
アズビル株式会社
圧力センサ
10日前
株式会社島津製作所
分光光度計
10日前
株式会社トプコン
測量システム
1日前
積水樹脂株式会社
建築物用浸水測定装置
今日
エスペック株式会社
環境形成装置
15日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ