TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024152167
公報種別
公開特許公報(A)
公開日
2024-10-25
出願番号
2023066202
出願日
2023-04-14
発明の名称
メッシュ復号装置、メッシュ復号方法及びプログラム
出願人
KDDI株式会社
代理人
フェリシテ弁理士法人
主分類
H04N
19/52 20140101AFI20241018BHJP(電気通信技術)
要約
【課題】メッシュの符号化効率を向上させること。
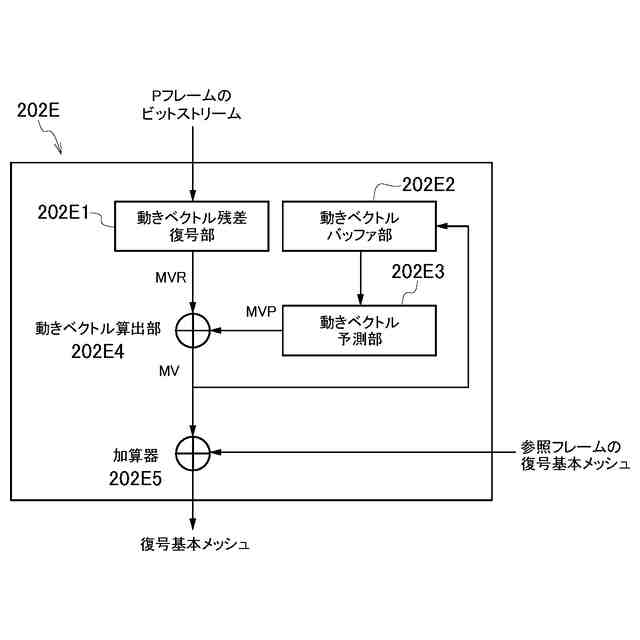
【解決手段】本発明に係るメッシュ復号装置200は、インターフレームのビットストリームから動きベクトル残差を生成する動きベクトル残差復号部202E1と、復号対象頂点及び前記復号対象頂点の周囲の頂点を含む領域の回転パラメータ及び平行移動パラメータを推定し、回転パラメータ及び平行移動パラメータに基づく復号対象頂点の予測方法を用いて復号対象頂点の動きベクトル予測値を算出する動きベクトル予測部202E3と、動きベクトル予測値と動きベクトル残差とを加算する動きベクトル算出部202E4とを備える。
【選択図】図9
特許請求の範囲
【請求項1】
メッシュ復号装置であって、
インターフレームのビットストリームから動きベクトル残差を生成する動きベクトル残差復号部と、
復号対象頂点及び前記復号対象頂点の周囲の頂点を含む領域の回転パラメータ及び平行移動パラメータを推定し、前記回転パラメータ及び前記平行移動パラメータに基づく前記復号対象頂点の予測方法を用いて前記復号対象頂点の動きベクトル予測値を算出する動きベクトル予測部と、
前記動きベクトル予測値と前記動きベクトル残差とを加算する動きベクトル算出部と、を備えることを特徴とするメッシュ復号装置。
続きを表示(約 1,700 文字)
【請求項2】
前記動きベクトル予測部は、
前記復号対象頂点に隣接する復号済みの面及び前記復号対象頂点を含む領域の前記回転パラメータ及び前記平行移動パラメータを推定し、
前記回転パラメータ及び前記平行移動パラメータにより、前記復号対象頂点に対応する参照フレームの頂点から移動させた位置を、前記復号対象頂点の位置予測値とすることを特徴とする請求項1に記載のメッシュ復号装置。
【請求項3】
前記動きベクトル予測部は、
前記復号対象頂点に隣接する前記復号済みの面が複数ある時に、前記復号済みの面のそれぞれを用いて複数の前記復号対象頂点の位置予測値を算出し、
前記複数の復号対象頂点の位置予測値の平均値を、前記復号対象頂点の位置予測値とすることを特徴とする請求項2に記載のメッシュ復号装置。
【請求項4】
前記動きベクトル予測部は、
前記復号対象頂点に隣接する前記復号済みの面が複数ある時に、複数の前記復号済みの面から1つの前記復号済みの面を選択し、
選択した前記復号済みの面を用いて、前記復号対象頂点の位置予測値を算出することを特徴とする請求項2に記載のメッシュ復号装置。
【請求項5】
前記動きベクトル予測部は、
前記復号対象頂点に隣接する前記復号済みの面が複数ある時に、前記複数の復号済みの面及び前記復号対象頂点を含む領域の前記回転パラメータ及び前記平行移動パラメータを推定することを特徴とする請求項2に記載のメッシュ復号装置。
【請求項6】
前記動きベクトル予測部は、前記インターフレームと1対1の対応関係を持つ復号済みの他のインターフレームを用いて、前記復号対象フレームの前記復号対象頂点の予測方法を決定することを特徴とする請求項1に記載のメッシュ復号装置。
【請求項7】
前記動きベクトル予測部は、前記復号済みの他のインターフレームにおける前記復号対象頂点に対応する頂点を用いて、平均予測法及びRigid motion predictionのそれぞれで前記動きベクトル予測値を算出し、前記平均予測法及び前記Rigid motion predictionのうち前記予測ベクトル予測値が小さい方を、前記復号対象頂点の予測方法として決定することを特徴とする請求項6に記載のメッシュ復号装置。
【請求項8】
前記動きベクトル予測部は、前記復号対象頂点の予測方法として、前記復号対象頂点に隣接する復号済みの面が複数ある時に、前記複数の復号済みの面の中から、前記他復号済みの他のインターフレームにおける前記復号対象頂点に対応する頂点の前記動きベクトル残差が最も小さい面を選択し、選択した前記面を用いて前記動きベクトル予測値を算出する方法を選択することを特徴とする請求項6に記載のメッシュ復号装置。
【請求項9】
メッシュ復号方法であって、
インターフレームのビットストリームから動きベクトル残差を生成する工程と、
復号対象頂点及び前記復号対象頂点の周囲の頂点を含む領域の回転パラメータ及び平行移動パラメータを推定し、前記回転パラメータ及び前記平行移動パラメータに基づく前記復号対象頂点の予測方法を用いて前記復号対象頂点の動きベクトル予測値を算出する工程と、
前記動きベクトル予測値と前記動きベクトル残差とを加算する工程とを有することを特徴とするメッシュ復号方法。
【請求項10】
コンピュータを、メッシュ復号装置として機能させるプログラムであって、
前記メッシュ復号装置は、
インターフレームのビットストリームから動きベクトル残差を生成する動きベクトル残差復号部と、
復号対象頂点及び前記復号対象頂点の周囲の頂点を含む領域の回転パラメータ及び平行移動パラメータを推定し、前記回転パラメータ及び前記平行移動パラメータに基づく前記復号対象頂点の予測方法を用いて前記復号対象頂点の動きベクトル予測値を算出する動きベクトル予測部と、
前記動きベクトル予測値と前記動きベクトル残差とを加算する動きベクトル算出部と、を備えることを特徴とするプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、メッシュ復号装置、メッシュ復号方法及びプログラムに関する。
続きを表示(約 4,000 文字)
【背景技術】
【0002】
非特許文献1には、非特許文献2を用いてメッシュを符号化する技術が開示されている。
【先行技術文献】
【非特許文献】
【0003】
Khaled Mammou, Jungsun Kim, Alexis M Tourapis, Dimitri Podborski, and Krasimir Kolarov, “[V-CG] Apple’s Dynamic Mesh Coding CfP Response,” April 2022, ISO/IEC JTC 1/SC 29/WG 7.
Google Draco、2022年5月26日アクセス[Online]、https://google.github.io/draco
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来技術では、動きベクトルの予測精度が低いため、動きベクトルの符号化効率が低いという問題点があった。 そこで、本発明は、上述の課題に鑑みてなされたものであり、メッシュの符号化効率を向上させることができるメッシュ復号装置、メッシュ復号方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0005】
本発明の第1の特徴は、メッシュ復号装置であって、インターフレームのビットストリームから、動きベクトル残差を生成する動きベクトル残差復号部と、復号対象頂点及び前記復号対象頂点の周囲の頂点を含む領域の回転パラメータ及び平行移動パラメータを推定し、前記回転パラメータ及び前記平行移動パラメータに基づいて前記復号対象頂点を予測する方法を用いて前記復号対象頂点の動きベクトル予測値を算出する動きベクトル予測部と、前記動きベクトル予測値と前記動きベクトル残差とを加算する動きベクトル導出部と、を備えることを要旨とする。
【0006】
本発明の第2の特徴は、メッシュ復号方法であって、インターフレームのビットストリームから、動きベクトル残差を生成する工程と、復号対象頂点及び前記復号対象頂点の周囲の頂点を含む領域の回転パラメータ及び平行移動パラメータを推定し、前記回転パラメータ及び前記平行移動パラメータに基づく前記復号対象頂点の予測方法を用いて前記復号対象頂点の動きベクトル予測値を算出する工程と、前記動きベクトル予測値と前記動きベクトル残差とを加算する工程とを有することを要旨とする。
【0007】
本発明の第3の特徴は、コンピュータを、メッシュ復号装置として機能させるプログラムであって、前記メッシュ復号装置は、インターフレームのビットストリームから、動きベクトル残差を生成する動きベクトル残差復号部と、復号対象頂点及び前記復号対象頂点の周囲の頂点を含む領域の回転パラメータ及び平行移動パラメータを推定し、前記回転パラメータ及び前記平行移動パラメータに基づく前記復号対象頂点の予測方法を用いて前記復号対象頂点の動きベクトル予測値を算出する動きベクトル予測部と、
前記動きベクトル予測値と前記動きベクトル残差とを加算する動きベクトル算出部と、を備えることを要旨とする。
【発明の効果】
【0008】
本発明によれば、メッシュの符号化効率を向上させることができるメッシュ復号装置、メッシュ復号方法及びプログラムを提供することができる。
【図面の簡単な説明】
【0009】
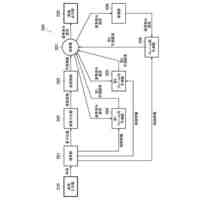
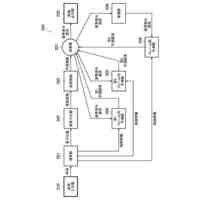
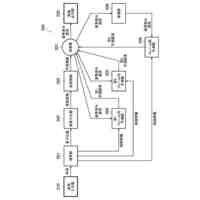
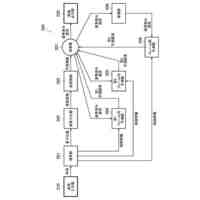
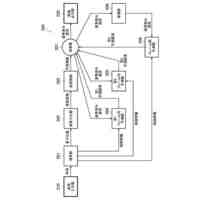
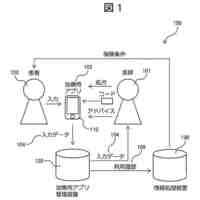
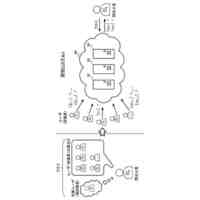
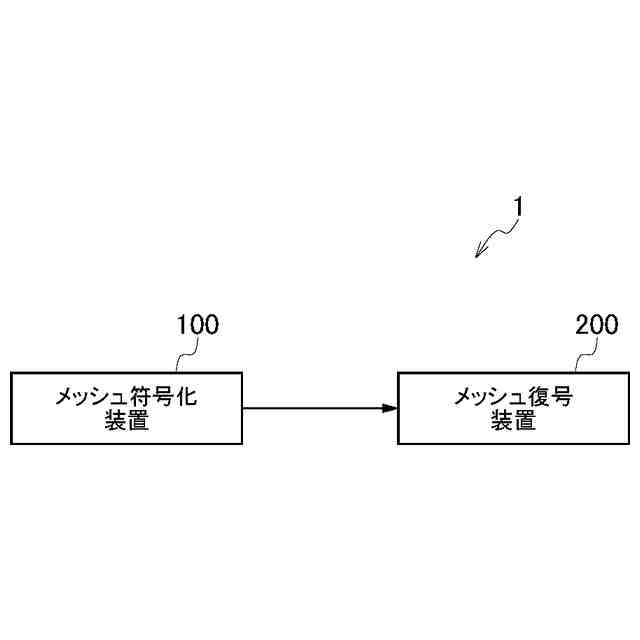
図1は、一実施形態に係るメッシュ処理システム1の構成の一例を示す図である。
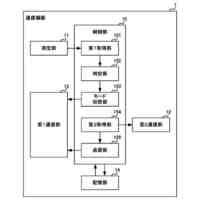
図2は、一実施形態に係るメッシュ復号装置200の機能ブロックの一例を示す図である。
図3Aは、基本メッシュ及び細分割メッシュの一例を示す図である。
図3Bは、基本メッシュ及び細分割メッシュの一例を示す図である。
図4は、基本メッシュビットストリームのシンタックス構成の一例を示す図である。
図5は、図5は、BPHのシンタックス構成の一例を示す図である。
図6は、一実施形態に係るメッシュ復号装置200の基本メッシュ復号部202の機能ブロックの一例を示す図である。
図7は、一実施形態に係るメッシュ復号装置200の基本メッシュ復号部202のイントラ復号部202Bの機能ブロックの一例を示す図である。
図8は、Pフレームの基本メッシュの頂点とIフレームの基本メッシュの頂点との間の対応関係の一例を示す図である。
図9は、一実施形態に係るメッシュ復号装置200の基本メッシュ復号部202のインター復号部202Eの機能ブロックの一例を示す図である。
図10は、一実施形態に係るメッシュ復号装置200の基本メッシュ復号部202のインター復号部202Eの動きベクトル予測部202E3による復号対象の頂点のMVPの算出方法の一例を説明するための図である。
図11は、一実施形態に係るメッシュ復号装置200の基本メッシュ復号部202のインター復号部202Eの動きベクトル予測部202E3の動作の一例を示すフローチャートを示す。
図12は、Rigid motion predictionのコンセプトを説明するための図である。
図13は、変更例1に係るメッシュ復号装置200の基本メッシュ復号部202の機能ブロックの変更例を示す図である。
図14は、変更例1に係るメッシュ復号装置200の基本メッシュ復号部202の変更例について説明するための図である。
図15は、一実施形態に係るメッシュ復号装置200の基本メッシュ復号部202のメッシュバッファ部202Cについて説明するための図である。
図16は、一実施形態に係るメッシュ復号装置200の基本メッシュ復号部202のメッシュバッファ部202Cについて説明するための図である。
図17は、変更例2に係るメッシュ復号装置200の基本メッシュ復号部202の変更例について説明するための図である。
図18は、変更例2に係るメッシュ復号装置200の基本メッシュ復号部202の変更例について説明するための図である。
図19は、一実施形態に係るメッシュ復号装置200の細分割部203の機能ブロックの一例について示す図である。
図20は、一実施形態に係るメッシュ復号装置200の細分割部203の基本メッシュ細分割部203Aの機能ブロックの一例を示す図である。
図21は、一実施形態に係るメッシュ復号装置200の細分割部203の基本メッシュ細分割部203Aの基本面分割部203A5による基本面の分割方法の一例について説明するための図である。
図22は、一実施形態に係るメッシュ復号装置200の細分割部203の基本メッシュ細分割部203Aの動作の一例を示すフローチャートである。
図23は、一実施形態に係るメッシュ復号装置200の細分割部203の細分割メッシュ調整部203Bの機能ブロックの一例を示す図である。
図24は、一実施形態に係るメッシュ復号装置200の細分割部203の細分割メッシュ調整部203Bの辺分割点移動部701によって基本面ABC上の辺分割点が移動されたケースの一例を示す図である。
図25は、一実施形態に係るメッシュ復号装置200の細分割部203の細分割メッシュ調整部203Bの細分割面分割部702によって基本面内の細分割面Xに対して再度細分割が行われたケースの一例を示す図である。
図26は、一実施形態に係るメッシュ復号装置200の細分割部203の細分割メッシュ調整部203Bの細分割面分割部702によって全ての細分割面に対して再度細分割が行われたケースの一例を示す図である。
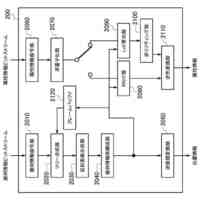
図27は、一実施形態に係るメッシュ復号装置200の変位量復号部206の機能ブロックの一例について示す図である(空間領域でインター予測が行われる場合)。
図28は、変位量ビットストリームの構成の一例について示す図である。
図29は、DPSのシンタックス構成の一例について示す図である。
図30は、DPHのシンタックス構成の一例について示す図である。
図31は、空間領域でインター予測が行われる場合の参照フレームと復号対象フレームとの間の周波数の対応関係の一例について説明するための図である。
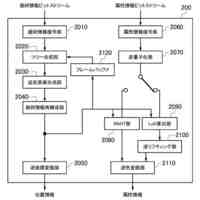
図32は、一実施形態に係るメッシュ復号装置200の変位量復号部206の機能ブロックの一例について示す図である(周波数領域でインター予測が行われる場合)。
図33は、周波数領域でインター予測が行われる場合の参照フレームと復号対象フレームとの間の周波数の対応関係の一例について説明するための図である。
図34は、一実施形態に係るメッシュ復号装置200の変位量復号部206の動作の一例を示すフローチャートである。
図35は、変形例1に係る変位量復号部206の機能ブロックの一例を示す図である。
図36は、変形例2に係る変位量復号部206の機能ブロックの一例を示す図である。
【発明を実施するための形態】
【0010】
以下、本発明の実施の形態について、図面を参照しながら説明する。なお、以下の実施形態における構成要素は、適宜、既存の構成要素等との置き換えが可能であり、また、他の既存の構成要素との組み合わせを含む様々なバリエーションが可能である。したがって、以下の実施形態の記載をもって、特許請求の範囲に記載された発明の内容を限定するものではない。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
1か月前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
27日前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
1か月前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
1か月前
KDDI株式会社
画像復号装置、画像復号方法及びプログラム
1か月前
KDDI株式会社
点群復号装置、点群復号方法及びプログラム
1か月前
KDDI株式会社
治療用アプリケーション、および情報処理装置
13日前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
メッシュ復号装置、メッシュ復号方法及びプログラム
1か月前
KDDI株式会社
情報処理システム、プログラムおよび保険条件判定方法
13日前
KDDI株式会社
危険サイトのリスト生成装置、リスト生成方法及びリスト生成プログラム
14日前
KDDI株式会社
サンプルデータにラベルを付与する能動学習のプログラム、装置及び方法
7日前
KDDI株式会社
効率的な接続処理のための基地局装置、端末装置、制御方法、及びプログラム
13日前
KDDI株式会社
情報処理装置及び情報処理方法
29日前
KDDI株式会社
効率的な接続設定情報の管理のための基地局装置、端末装置、制御方法、及びプログラム
13日前
KDDI株式会社
情報処理装置、情報処理方法及びプログラム
1か月前
KDDI株式会社
プライバシー保護型評判システム、評判スコア計算装置、評判スコア計算方法及びプログラム
7日前
KDDI株式会社
物体光逆量子化装置、物体光量子化装置、物体光逆量子化方法、物体光量子化方法及びプログラム
1か月前
KDDI株式会社
情報処理システム、プログラムおよび保険条件判定方法
13日前
KDDI株式会社
配車管理システム、配車予約管理方法及びコンピュータプログラム
7日前
KDDI株式会社
効率的な接続先変更処理のための端末装置、制御方法、及びプログラム
16日前
個人
挿耳装置
1か月前
個人
仮想アース
1か月前
個人
環境音制御方法
7日前
個人
車両の制御装置
2か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ