TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024138620
公報種別
公開特許公報(A)
公開日
2024-10-09
出願番号
2023049186
出願日
2023-03-27
発明の名称
締固めシステム
出願人
日立建機株式会社
代理人
弁理士法人平木国際特許事務所
主分類
E01C
19/23 20060101AFI20241002BHJP(道路,鉄道または橋りょうの建設)
要約
【課題】例えば作業機械が通過すべき列の長さや列毎の走行回数を施工現場の状況を考慮して決定し、走行目標ラインを簡易に生成することができる締固めシステムを提供する。
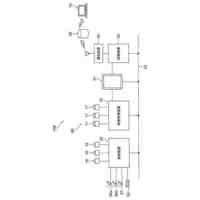
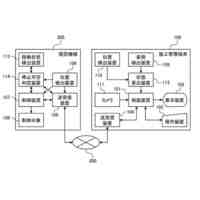
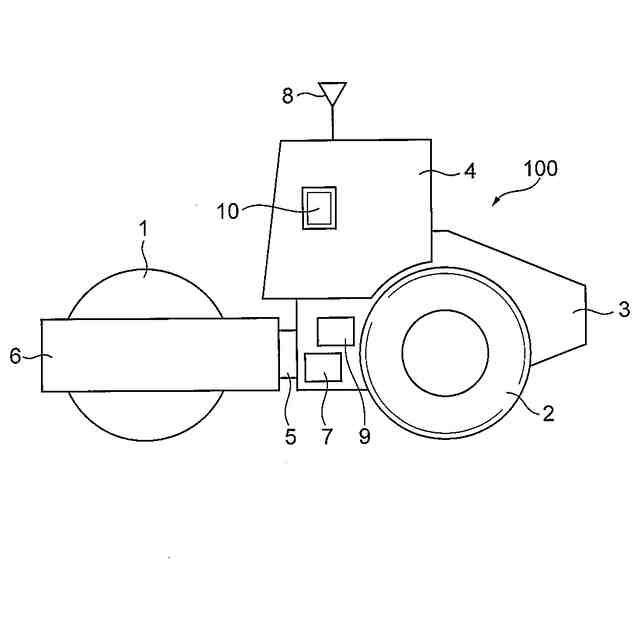
【解決手段】作業機械の車体位置を計測する位置計測装置(位置センサ8)と、作業機械の車体傾斜を計測する傾斜計測装置(傾斜センサ7)と、施工エリアの開始位置と終了位置と往復回数を入力するインタフェース10と、位置計測装置(位置センサ8)で計測された車体位置と傾斜計測装置(傾斜センサ7)で計測された車体傾斜に基づいて、前記作業機械の沈み込み量を算出し、前記沈み込み量と(前記インタフェース10から入力された)前記開始位置と前記終了位置と前記往復回数に基づいて、作業機械を施工エリアの開始位置と終了位置の間で往復回数分走行させる走行目標ラインを作成するコントローラ9と、を備える。
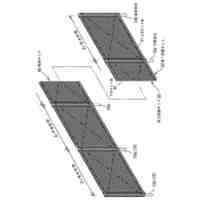
【選択図】図3
特許請求の範囲
【請求項1】
走行目標ラインに沿って施工エリアを往復走行しながら前記施工エリアの地面を締め固める作業機械の走行計画を立案する締固めシステムにおいて、
前記作業機械の車体位置を計測する位置計測装置と、
前記作業機械の車体傾斜を計測する傾斜計測装置と、
前記施工エリアの開始位置と終了位置と往復回数を入力するインタフェースと、
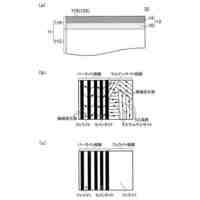
前記位置計測装置で計測された前記車体位置と前記傾斜計測装置で計測された前記車体傾斜に基づいて、前記作業機械の沈み込み量を算出し、前記沈み込み量と前記開始位置と前記終了位置と前記往復回数に基づいて、幅が車体幅以下である隣り合う複数本の締固め用レーンと、隣り合う締固め用レーンへレーンチェンジするためのレーンチェンジ用レーンとを含み、前記作業機械を前記施工エリアの前記開始位置と前記終了位置の間で前記往復回数分走行させる走行目標ラインを作成するコントローラと、を備え、
前記コントローラは、
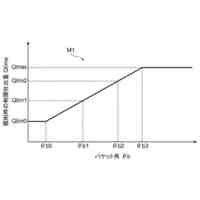
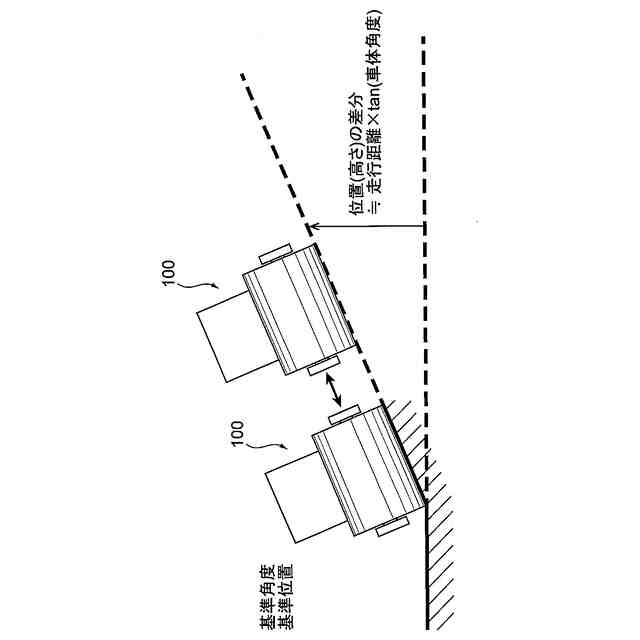
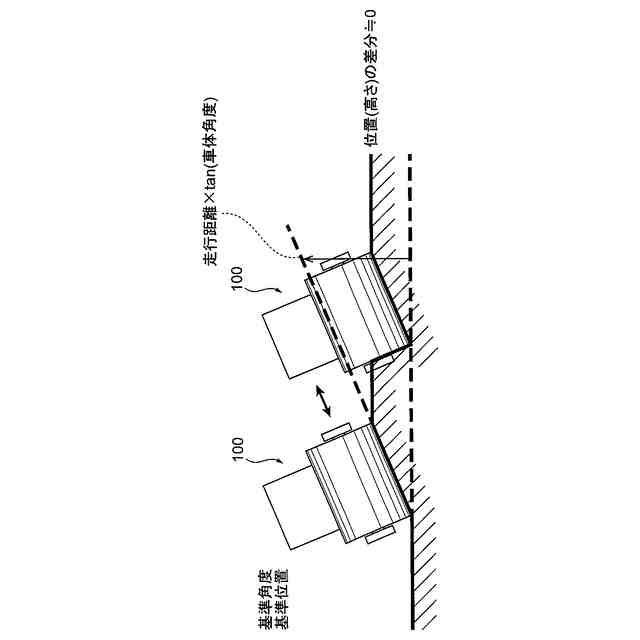
前記車体位置から走行距離を算出し、前記走行距離と前記車体傾斜から推測車両高さを算出し、前記推測車両高さと前記車体位置に含まれる車両高さの差を前記沈み込み量として算出し、
前記沈み込み量に基づき、前記走行目標ラインを作成することを特徴とする締固めシステム。
続きを表示(約 1,700 文字)
【請求項2】
請求項1に記載の締固めシステムにおいて、
前記コントローラは、
前記沈み込み量が所定の沈み込み判定閾値より大きい場合は、沈み込みがあると判断し、前記施工エリアの前記開始位置から前記終了位置に向かって隣り合うように複数本の締固め用レーンを配置し、その後に前記施工エリアの前記終了位置から前記開始位置に向かって隣り合うように複数本の締固め用レーンを配置し、隣り合う締固め用レーンの間にレーンチェンジ用レーンを配置する往復レーン配置処理を行い、当該往復レーン配置処理を前記往復回数分繰り返すことで前記走行目標ラインを作成し、
前記沈み込み量が前記所定の沈み込み判定閾値以内の場合は、沈み込みがないと判断し、前記施工エリアの前記開始位置から締固め用レーンを前記往復回数分配置し、その後に前記締固め用レーンに隣り合うように締固め用レーンを前記往復回数分配置し、隣り合う締固め用レーンの間にレーンチェンジ用レーンを配置する往復レーン配置処理を前記施工エリアの前記終了位置まで繰り返すことで前記走行目標ラインを作成することを特徴とする締固めシステム。
【請求項3】
請求項2に記載の締固めシステムにおいて、
前記コントローラは、沈み込みがないと判断した場合の前記レーンチェンジ用レーンの長さを、沈み込みがあると判断した場合の前記レーンチェンジ用レーンの長さよりも短くすることを特徴とする締固めシステム。
【請求項4】
請求項2に記載の締固めシステムにおいて、
前記コントローラは、沈み込みがないと判断した場合の前記レーンチェンジ用レーンを走行するための前記作業機械のステアリング角度が、沈み込みがあると判断した場合の前記レーンチェンジ用レーンを走行するための前記作業機械のステアリング角度よりも大きくなるような前記走行目標ラインを作成することを特徴とする締固めシステム。
【請求項5】
請求項2に記載の締固めシステムにおいて、
前記コントローラは、沈み込みがないと判断した場合の前記レーンチェンジ用レーンの長さ、もしくは、沈み込みがないと判断した場合の前記レーンチェンジ用レーンを走行するための前記作業機械のステアリング角度を、予め決められた長さもしくはステアリング角度に設定することを特徴とする締固めシステム。
【請求項6】
請求項2に記載の締固めシステムにおいて、
前記コントローラは、沈み込みがないと判断した場合の前記レーンチェンジ用レーンの長さ、もしくは、沈み込みがないと判断した場合の前記レーンチェンジ用レーンを走行するための前記作業機械のステアリング角度を、前記沈み込み量に基づいて設定することを特徴とする締固めシステム。
【請求項7】
請求項2に記載の締固めシステムにおいて、
前記コントローラは、前記沈み込み量が前記沈み込み判定閾値より大きい所定の分割判定閾値より大きい場合、前記施工エリアを予め決められた複数の分割エリアに分割し、前記分割エリアそれぞれで前記走行目標ラインを作成することを特徴とする締固めシステム。
【請求項8】
請求項2に記載の締固めシステムにおいて、
前記コントローラは、前記沈み込み量が前記沈み込み判定閾値より大きい所定の分割判定閾値より大きい場合、前記施工エリアを前記沈み込み量に応じて決められた複数の分割エリアに分割し、前記分割エリアそれぞれで前記走行目標ラインを作成することを特徴とする締固めシステム。
【請求項9】
請求項1に記載の締固めシステムにおいて、
前記コントローラは、作成した前記走行目標ラインを前記インタフェースに表示させることを特徴とする締固めシステム。
【請求項10】
請求項1に記載の締固めシステムにおいて、
前記コントローラは、前記作業機械の操舵角と速度を制御する車体制御アクチュエータによって、作成した前記走行目標ラインに沿って前記作業機械を往復走行させる制御を行うことを特徴とする締固めシステム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、転圧ローラに代表される地面の締固めに用いる作業機械の走行計画を立案する締固めシステムに関するものである。
続きを表示(約 1,600 文字)
【背景技術】
【0002】
地面を締め固める施工において、振動を地面に加えることができる作業機械が一般的に使用されている。作業機械を操作するオペレータは、締固め状況に応じて振動条件や車速、走行回数を決定している。
【0003】
特許文献1によれば、作業機械に地面の締固め度を検出するために加速度センサで構成される締固め度検出手段を備え、走行目標ラインを往復走行する場合に、前回走行で記憶した目標点毎の締固め度に応じて、次回走行時に前記振動条件および車速を変えることで、地面の締固め度を人手によらず自動で管理できる技術が開示されている。
【0004】
ここで、走行目標ラインは、作業機械が通過すべき座標とその順番が記録されている。一般的に走行目標ラインは、作業機械が前進および後進する方向に列の座標を配置し、その列を隣り合わせに配置し、隣り合った列の間はレーンチェンジ用の座標を配置することで作成される。また、同じ場所を複数回走行(往復走行)するために、作業機械が前進および後進する方向の列は複数回配置される。
【先行技術文献】
【特許文献】
【0005】
特開2020-030625号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ところで、特許文献1には走行目標ラインを生成する方法の言及が無い。そのため、走行目標ラインの生成には人手が必要になっているという課題がある。また、走行目標ラインの決定においては、施工関係者が施工現場の地面の固さを考慮して、地面が均一に締め固められるように列の長さと列毎の走行回数を設定する必要がある。
【0007】
本発明は、上記課題を鑑みてなされたものであり、その目的は、例えば作業機械が通過すべき列の長さや列毎の走行回数を施工現場の状況を考慮して決定し、走行目標ラインを簡易に生成することができる締固めシステムを提供することである。
【課題を解決するための手段】
【0008】
上記課題を解決するため、本発明に係る締固めシステムは、走行目標ラインに沿って施工エリアを往復走行しながら前記施工エリアの地面を締め固める作業機械の走行計画を立案する締固めシステムにおいて、前記作業機械の車体位置を計測する位置計測装置と、前記作業機械の車体傾斜を計測する傾斜計測装置と、前記施工エリアの開始位置と終了位置と往復回数を入力するインタフェースと、前記位置計測装置で計測された前記車体位置と前記傾斜計測装置で計測された前記車体傾斜に基づいて、前記作業機械の沈み込み量を算出し、前記沈み込み量と前記開始位置と前記終了位置と前記往復回数に基づいて、幅が車体幅以下である隣り合う複数本の締固め用レーンと、隣り合う締固め用レーンへレーンチェンジするためのレーンチェンジ用レーンとを含み、前記作業機械を前記施工エリアの前記開始位置と前記終了位置の間で前記往復回数分走行させる走行目標ラインを作成するコントローラと、を備え、前記コントローラは、前記車体位置から走行距離を算出し、前記走行距離と前記車体傾斜から推測車両高さを算出し、前記推測車両高さと前記車体位置に含まれる車両高さの差を前記沈み込み量として算出し、前記沈み込み量に基づき、前記走行目標ラインを作成することを特徴とする。
【発明の効果】
【0009】
本発明によれば、走行目標ラインを簡易に生成することができる締固めシステムを提供することができる。
【0010】
上記した以外の課題、構成および効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
日立建機株式会社
作業車両
25日前
日立建機株式会社
作業機械の稼働現場管理システム
1か月前
日立建機株式会社
窒化鋼部品及び窒化鋼部品の製造方法
3か月前
日立建機株式会社
建設機械の動作制御システム
1か月前
積水樹脂株式会社
防音装置
1か月前
個人
偶数個のモードトラップ付きTE011モード空洞の閉じた連結によるD-D、D-T、D-He3、p-Li,p-B共鳴核融合炉(Resonantron)
23日前
丸紅建材リース株式会社
覆工板
1日前
フジイコーポレーション株式会社
除雪機
23日前
株式会社吾妻製作所
自発光式シート
10日前
株式会社吾妻製作所
自発光式シート
10日前
株式会社カーボーイ
安全標識コーン
1日前
株式会社ワイズテック
目地材除去装置
1か月前
株式会社イノアック住環境
橋梁構造物
1日前
個人
メンテナンス方法およびメンテナンス装置
1か月前
ベルテクス株式会社
防護柵
23日前
センクシア株式会社
箱桁防錆用部材、箱桁防錆構造
3日前
日鉄神鋼建材株式会社
反射材付きボラード及び反射板
1か月前
NOK株式会社
標識柱
1か月前
株式会社鉄軌
レール受台
1日前
個人
スコップ補助具及び固定ユニット
9日前
新中央工業株式会社
パネルの固定金具及びパネルの固定構造
3日前
清水建設株式会社
プレキャスト床版の接合構造
1か月前
吉原鉄道工業株式会社
まくらぎ下用ボルト固定治具
1か月前
アシストインターナショナル株式会社
人工芝用の充填材処理装置
23日前
久保田セメント工業株式会社
舗装用ブロック
1か月前
株式会社マイスターズインク
ガードレールの保護方法及び保護装置
23日前
三菱重工機械システム株式会社
発進制御機
3日前
ランデス株式会社
プレキャストコンクリート床版
1日前
株式会社トップ
ロードコーンおよびロードコーン・コーンバー連結構造
29日前
株式会社DroneWorkSystem
無人航空機直下作業防護装置
1か月前
丸藤シートパイル株式会社
覆工板用昇降タラップ及びその取付具
1か月前
東海旅客鉄道株式会社
道路構造及び道路の施工方法
1日前
NOK株式会社
標識柱及び標識システム
1か月前
有限会社吉田構造デザイン
防護柵およびその補強方法
1日前
NOK株式会社
標識柱
1か月前
株式会社IHI
継手構造、床版および床版取替方法
23日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ