TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024134580
公報種別
公開特許公報(A)
公開日
2024-10-04
出願番号
2023044844
出願日
2023-03-22
発明の名称
位置推定装置、自動運転システム、位置推定方法およびプログラム
出願人
三菱電機株式会社
代理人
弁理士法人山王内外特許事務所
主分類
G01C
21/28 20060101AFI20240927BHJP(測定;試験)
要約
【課題】 車両の挙動を検出するセンサの特性に応じた誤差が抑制された車両の位置推定を行うことができる位置推定装置、自動運転システム、位置推定方法およびプログラムを提供する。
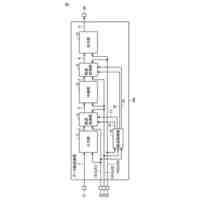
【解決手段】 位置推定装置(2)は、車両Aの角速度に基づく車両Aの第1のヨー角情報と、車両Aの左右車輪の移動距離に基づく車両Aの第2のヨー角情報と、車両Aの操舵角および車速に基づく車両Aの第3のヨー角情報に設定する重みを判定する重み判定部(21)と、第1のヨー角情報、第2のヨー角情報および第3のヨー角情報を取得するヨー情報取得部(22)と、判定された重みを設定した第1のヨー角情報、第2のヨー角情報および第3のヨー角情報を合成した合成ヨー角情報を生成する合成部(23)と、車両Aの測位情報、車両Aの車速および合成ヨー角情報を用いて、車両Aの位置を推定する位置推定部(24)とを備える。
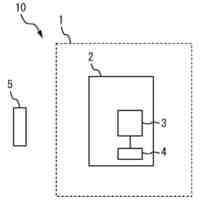
【選択図】 図1
特許請求の範囲
【請求項1】
車両が走行状態または前記車両の周辺状態に基づいて、前記車両の角速度に基づく前記車両の第1のヨー情報と、前記車両の左右車輪の移動距離差に基づく前記車両の第2のヨー情報と、前記車両の操舵角および車速に基づく前記車両の第3のヨー情報とに設定する重みを判定する重み判定部と、
前記第1のヨー情報、前記第2のヨー情報および前記第3のヨー情報を取得するヨー情報取得部と、
判定された前記重みを設定した前記第1のヨー情報、前記第2のヨー情報および前記第3のヨー情報を合成した合成ヨー情報を生成する合成部と、
前記車両の測位情報、前記車両の車速および前記合成ヨー情報を用いて前記車両の位置を推定する位置推定部と、を備えた
ことを特徴とする位置推定装置。
続きを表示(約 1,700 文字)
【請求項2】
前記ヨー情報取得部は、
前記車両の角速度に基づいて、前記車両の第1のヨー角情報を算出する第1のヨー角算出部と、
前記車両の左右車輪の移動距離差に基づいて、前記車両の第2のヨー角情報を算出する第2のヨー角算出部と、
前記車両の操舵角および車速に基づいて、前記車両の第3のヨー角情報を算出する第3のヨー角算出部と、を備えた
ことを特徴とする請求項1に記載の位置推定装置。
【請求項3】
前記重み判定部は、
前記車両の車速が第1の閾値以上であり、前記車両の角速度が第2の閾値未満であり、前記車両の角速度の誤差が除去されない時間が一定時間未満である場合、前記第1のヨー角情報の重みを大きくして、前記第2のヨー角情報の重みを小さくし、前記第3のヨー角情報の重みを小さくし、
前記車両の角速度の誤差が除去されない時間が一定時間以上である場合には、前記第1のヨー角情報の重みを小さくして、前記第2のヨー角情報の重みを大きくする
ことを特徴とする請求項2に記載の位置推定装置。
【請求項4】
前記重み判定部は、
前記車両の車速が前記第1の閾値未満であり、前記車両の角速度が前記第2の閾値未満である場合、前記第2のヨー角情報の重みを大きくして、前記第1のヨー角情報の重みを小さくし、前記第3のヨー角情報の重みを小さくする
ことを特徴とする請求項3に記載の位置推定装置。
【請求項5】
前記重み判定部は、
前記車両の車速が前記第1の閾値未満であり、前記車両の角速度が前記第2の閾値以上である場合に、前記第3のヨー角情報の重みを大きくして、前記第1のヨー角情報の重みを小さくし、前記第2のヨー角情報の重みを小さくし、
前記車両の車速が前記第1の閾値以上であり、前記車両の角速度が前記第2の閾値以上である場合は、前記第1のヨー角情報の重みを大きくして、前記第2のヨー角情報の重みを小さくし、前記第3のヨー角情報に対する重みを小さくする
ことを特徴とする請求項3に記載の位置推定装置。
【請求項6】
前記重み判定部は、前記車両が走行している路面の起伏が第3の閾値以上である場合、前記第1のヨー角情報の重みを大きくして、前記第2のヨー角情報の重みを小さくし、前記第3のヨー角情報に対する重みを小さくする
ことを特徴とする請求項2に記載の位置推定装置。
【請求項7】
前記重み判定部は、前記車両が走行している路面の滑り度合いが第4の閾値以上である場合、前記第1のヨー角情報の重みを大きくして、前記第2のヨー角情報の重みを小さくし、前記第3のヨー角情報に対する重みを小さくする
ことを特徴とする請求項2に記載の位置推定装置。
【請求項8】
前記重み判定部は、
前記車両が走行する走行経路における区間ごとに、前記第1のヨー角情報、前記第2のヨー角情報および前記第3のヨー角情報に設定する重みを判定する第1の重み設定部と、
前記車両が走行しているときの前記走行経路の状態の変化に応じて、前記第1のヨー角情報、前記第2のヨー角情報および前記第3のヨー角情報に設定する重みを変更する第2の重み設定部と、を備えた
ことを特徴とする請求項2に記載の位置推定装置。
【請求項9】
前記第1のヨー情報は、前記車両の角速度に基づいた第1のヨーレート情報であり、
前記第2のヨー情報は、前記車両の左右の車輪の移動距離に基づいた第2のヨーレート情報であり、
前記第3のヨー情報は、前記車両の操舵角および車速に基づいた第3のヨーレート情報である
ことを特徴とする請求項1に記載の位置推定装置。
【請求項10】
請求項1から請求項9のいずれか1項に記載の位置推定装置と、
位置推定装置によって推定された前記車両の位置に基づいて当該車両の移動を制御する車両自動制御装置と、を備えた
ことを特徴とする自動運転システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、位置推定装置、自動運転システム、位置推定方法およびプログラムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
絶対位置測位は、測位の間隔で取得されなかったデータの補間、トンネルまたは建物等の遮蔽による未測位区間のデータの補償または測位精度の監視が必要である。このため、絶対位置測位と相対位置測位との組み合わせによる車両の位置推定が行われている。絶対位置測位は、例えば、GPS(Global Positioning System)衛星測位である。車両の自律航法である相対位置測位は、走行時の車両の挙動を検出するセンサからのセンサ情報を用いて車両の位置を推定するものである。
【0003】
走行時の車両の挙動を検出するセンサには、例えば、車速センサ、ジャイロセンサ、車輪速センサ、および、操舵角センサがある。例えば、相対位置測位には、ジャイロセンサが検出した車両の角速度を用いる第1の測位方式、車輪速センサが検出した左右車輪の移動距離差を用いる第2の測位方式、および、操舵角センサが検出した車両の操舵角を用いる第3の測位方式がある。
【0004】
例えば、特許文献1には、外界センサからの情報が途絶した場合、内界センサで検出した車両の移動量の蓄積に基づいて車両の位置を推定する慣性航法装置が記載されている。
特許文献1において、外界センサは、車両以外の状況を検知するものである。内界センサは、走行時の車両の挙動を示す3軸の角速度(ピッチレート、ロールレートおよびヨーレート)と3軸の加速度(前後加速度、横加速度および上下加速度)が検出可能なIMU(Inertial Measurement Unit)、車速センサ、および操舵角センサ等の、車両自身の状態を検知するものである。
【先行技術文献】
【特許文献】
【0005】
特許第7036080号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
相対位置測位である第1の測位方式、第2の測位方式および第3の測位方式には、それぞれの特性に応じた誤差が発生するという課題があった。
特許文献1に記載される従来の技術は、第1の測位方式および第3の測位方式のうち、車両の加速度、角速度および操舵角のセンサ値を一定条件下で選択し、選択したセンサ値を用いる測位方式で車両の位置を推定している。このため、誤差の小さい測位方式が適切に選択されなかった場合、精度よく車両の位置を推定することができない。
【0007】
本開示は上記課題を解決するものであり、測位方式の特性に応じた誤差を抑制することができる、位置推定装置、自動運転システム、位置推定方法およびプログラムを得ることを目的とする。
【課題を解決するための手段】
【0008】
本開示に係る位置推定装置は、車両が走行状態または車両の周辺状態に基づいて、車両の角速度に基づく車両の第1のヨー情報と、車両の左右車輪の移動距離差に基づく車両の第2のヨー情報と、車両の操舵角および車速に基づく車両の第3のヨー情報とに設定する重みを判定する重み判定部と、第1のヨー情報、第2のヨー情報および第3のヨー情報を取得するヨー情報取得部と、判定された重みを設定した第1のヨー情報、第2のヨー情報および第3のヨー情報を合成した合成ヨー情報を生成する合成部と、車両の測位情報、車両の車速および合成ヨー情報を用いて車両の位置を推定する位置推定部と、を備える。
【発明の効果】
【0009】
本開示によれば、車両が走行状態または車両の周辺状態に基づいて、車両の角速度に基づく第1のヨー情報と、車両の左右車輪の移動距離差に基づく第2のヨー情報と、車両の操舵角および車速に基づく第3のヨー情報とに設定する重みを判定し、判定した重みを設定した第1のヨー情報、第2のヨー情報および第3のヨー情報を合成した合成ヨー情報、車両の測位情報、車両の車速および合成ヨー情報を用いて車両の位置を推定する。これにより、本開示に係る位置推定装置は、測位方式の特性に応じた誤差を抑制することができる。
【図面の簡単な説明】
【0010】
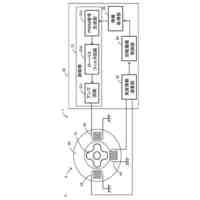
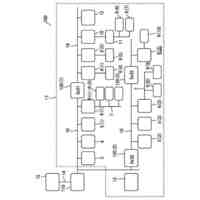
実施の形態1に係る自動運転システムの構成を示すブロック図である。
実施の形態1に係る位置推定装置の構成を示すブロック図である。
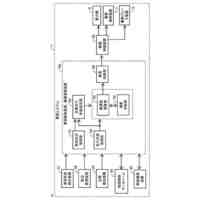
実施の形態1における重み判定部の構成を示すブロック図である。
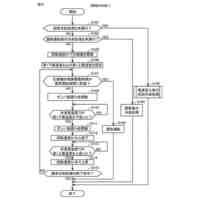
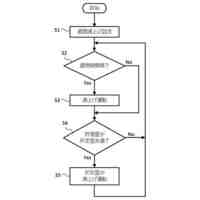
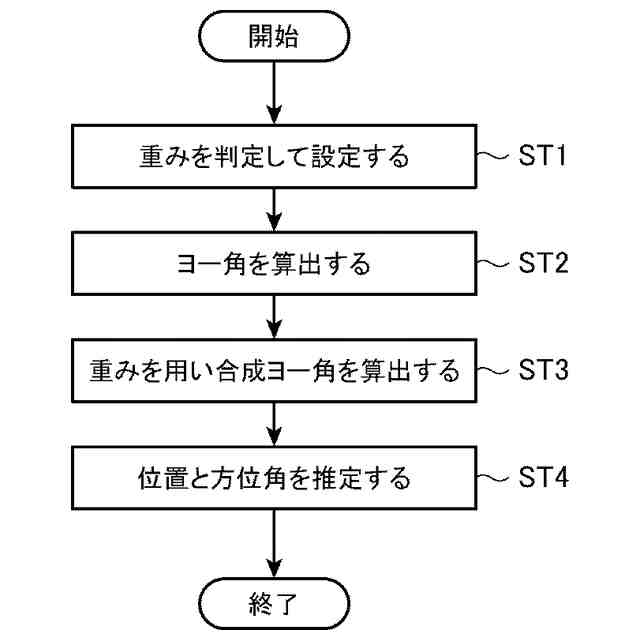
実施の形態1に係る位置推定方法を示すフローチャートである。
図5Aおよび図5Bは実施の形態1に係る位置推定装置の機能を実現するハードウェア構成を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
モータ
3日前
三菱電機株式会社
吸音体
6日前
三菱電機株式会社
冷蔵庫
12日前
三菱電機株式会社
冷蔵庫
3日前
三菱電機株式会社
開閉器
6日前
三菱電機株式会社
給湯装置
27日前
三菱電機株式会社
照明器具
16日前
三菱電機株式会社
照明器具
16日前
三菱電機株式会社
照明器具
12日前
三菱電機株式会社
送風装置
1か月前
三菱電機株式会社
照明器具
2日前
三菱電機株式会社
送風装置
1か月前
三菱電機株式会社
回転電機
17日前
三菱電機株式会社
照明器具
16日前
三菱電機株式会社
空気調和機
6日前
三菱電機株式会社
食器洗浄機
17日前
三菱電機株式会社
加熱調理器
23日前
三菱電機株式会社
電気掃除機
24日前
三菱電機株式会社
加熱調理器
6日前
三菱電機株式会社
電池パック
16日前
三菱電機株式会社
加熱調理器
6日前
三菱電機株式会社
加熱調理器
2日前
三菱電機株式会社
電動駆動装置
6日前
三菱電機株式会社
換気端末部材
16日前
三菱電機株式会社
角度検出装置
16日前
三菱電機株式会社
発熱対応構造
6日前
三菱電機株式会社
給湯システム
16日前
三菱電機株式会社
給湯システム
16日前
三菱電機株式会社
最適演算装置
16日前
三菱電機株式会社
貯湯式給湯機
16日前
三菱電機株式会社
制御システム
1か月前
三菱電機株式会社
電力変換装置
3日前
三菱電機株式会社
貯湯式給湯機
17日前
三菱電機株式会社
誘導加熱装置
24日前
三菱電機株式会社
RC-IGBT
5日前
三菱電機株式会社
データ転送装置
27日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ