TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024126086
公報種別
公開特許公報(A)
公開日
2024-09-20
出願番号
2023034242
出願日
2023-03-07
発明の名称
移動ロボットに搭載されるペイロード
出願人
株式会社フジタ
代理人
インフォート弁理士法人
,
個人
,
個人
,
個人
主分類
G05D
3/00 20060101AFI20240912BHJP(制御;調整)
要約
【課題】移動ロボットを工事現場等での巡回業務に利用可能に拡張するペイロードを提供する。
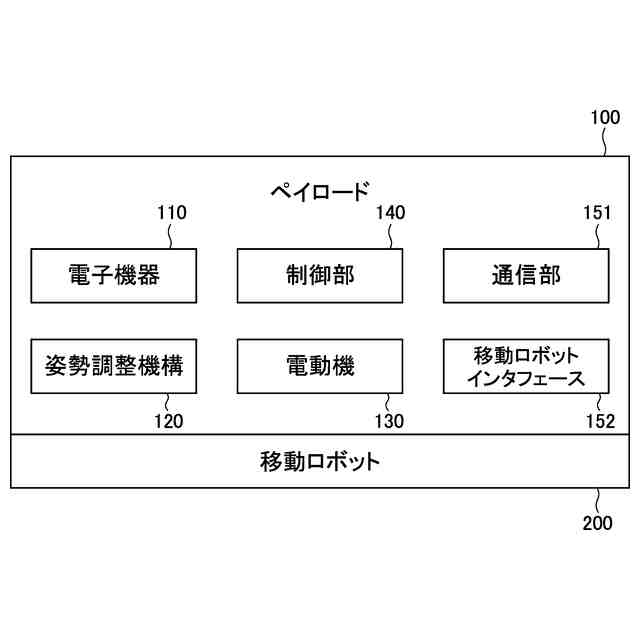
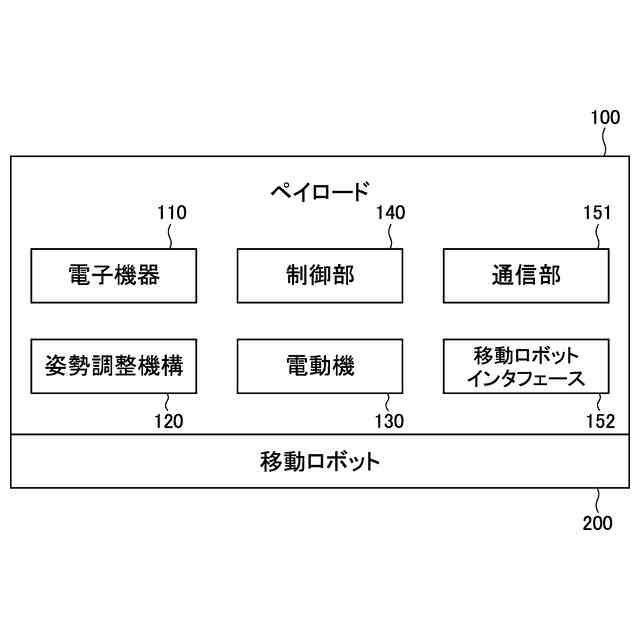
【解決手段】ペイロード100は、移動ロボット200に搭載されるペイロードであって、周辺環境を計測または撮影する電子機器110と、移動ロボット200に対する電子機器110の位置と向きを変更する姿勢調整機構120と、姿勢調整機構120を制御する制御部140と、を備える。
【選択図】図2
特許請求の範囲
【請求項1】
移動ロボットに搭載されるペイロードであって、
周辺環境を計測または撮影する電子機器と、
前記移動ロボットに対する前記電子機器の位置と向きを変更する姿勢調整機構と、
前記姿勢調整機構を制御する制御部と、を備える
ことを特徴とするペイロード。
続きを表示(約 1,200 文字)
【請求項2】
請求項1に記載のペイロードにおいて、
前記姿勢調整機構は、前記電子機器を衝撃から保護する保護部材を備え、
前記制御部は、
前記移動ロボットの移動中に前記電子機器が前記保護部材に収容される第1の位置に維持されるように、前記姿勢調整機構を制御し、
前記電子機器の計測または撮影中に前記電子機器が前記第1の位置とは異なる位置に位置付けられるように、前記姿勢調整機構を制御する
ことを特徴とするペイロード。
【請求項3】
請求項2に記載のペイロードにおいて、
前記姿勢調整機構は、水平な回転軸を有する、前記電子機器が固定された保持部材であって、回動範囲の一端において前記電子機器を前記第1の位置に位置付ける保持部材を備え、
前記制御部は、前記保持部材が前記回転軸周りに回動するように、前記姿勢調整機構を制御する
ことを特徴とするペイロード。
【請求項4】
請求項3に記載のペイロードにおいて、
前記保護部材は、前記回転軸周りに回動する前記保持部材の軌跡上が開放された、前記回転軸方向からの衝撃と前記移動ロボットからの衝撃を吸収する、バスケット形状を有する
ことを特徴とするペイロード。
【請求項5】
請求項4に記載のペイロードにおいて、
前記保護部材は、少なくとも3層構造を有し、
前記3層構造は、前記第1の位置の前記電子機器に近い層から順に、
第1層と
前記第1層よりも硬い第2層と、
前記第1層よりも硬い、前記第2層とは硬さの異なる第3層と、を備える
ことを特徴とするペイロード。
【請求項6】
請求項4に記載のペイロードにおいて、
前記保護部材は、前記第1の位置に位置付けられた前記電子機器の高さ以上の深さを有する
ことを特徴とするペイロード。
【請求項7】
請求項3に記載のペイロードにおいて、
前記姿勢調整機構は、さらに、
前記回転軸を回転自在に支持する支持部材と、
前記支持部材が固定された回転ステージと、を備え、
前記制御部は、前記回転軸の向きを変更するように、前記姿勢調整機構を制御する
ことを特徴とするペイロード。
【請求項8】
請求項3に記載のペイロードにおいて、
前記保持部材は、前記回転軸から前記電子機器までの距離を可変する伸縮構造を有し、
前記制御部は、前記距離を変更するように、前記姿勢調整機構を制御する
ことを特徴とするペイロード。
【請求項9】
請求項1乃至請求項8の何れか1項に記載のペイロードにおいて、
前記電子機器は、3Dスキャナである
ことを特徴とするペイロード。
発明の詳細な説明
【技術分野】
【0001】
本明細書の開示は、移動ロボットに搭載されるペイロードに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
建設現場における省力化、省人化、生産性向上を実現する手段として、安全管理、進捗管理、品質管理等のために行われる巡回業務への移動ロボットの活用が期待されている。これに関連する技術は、例えば、特許文献1に記載されている。特許文献1には、移動体に搭載した測量装置で三次元点群データを取得する技術が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-145442号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
人間が建築現場で行う巡回作業では、姿勢を変えて隙間や障害物の裏側などを覗き込む動作がしばしば必要となる。このような動作を移動ロボットの通常の移動機能だけで再現することは一般に困難である。このため、移動ロボットに積載されるペイロードには、覗き込む動作などを再現するために、計測や撮影に用いる電子機器の姿勢を変更する機能が求められる。
【0005】
以上のような実情を踏まえ、本発明の一側面に係る目的は、移動ロボットを工事現場等での巡回業務に利用可能に拡張するペイロードを提供することである。
【課題を解決するための手段】
【0006】
本発明の一態様に係るペイロードは、移動ロボットに搭載されるペイロードであって、周辺環境を計測または撮影する電子機器と、前記移動ロボットに対する前記電子機器の位置と向きを変更する姿勢調整機構と、前記姿勢調整機構を制御する制御部と、を備える。
【発明の効果】
【0007】
上記の態様によれば、移動ロボットを工事現場等での巡回業務に利用可能に拡張するペイロードを提供することができる。
【図面の簡単な説明】
【0008】
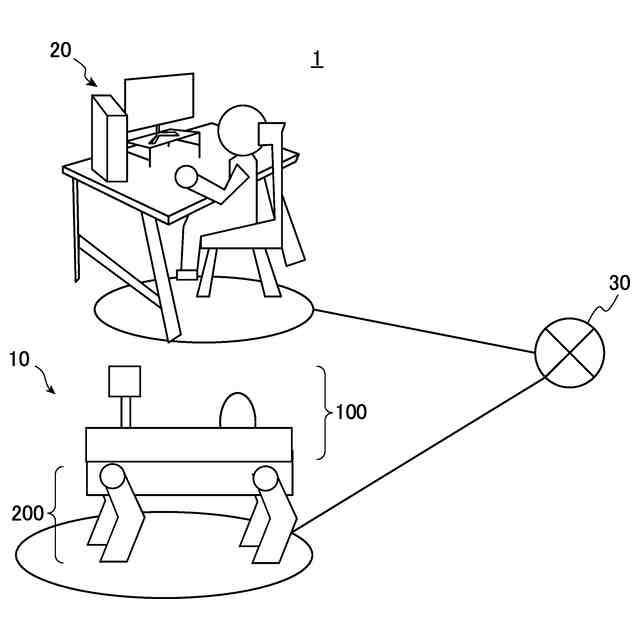
第1の実施形態に係るシステムの構成を例示した図である。
第1の実施形態に係る巡回装置の構成を例示した図である。
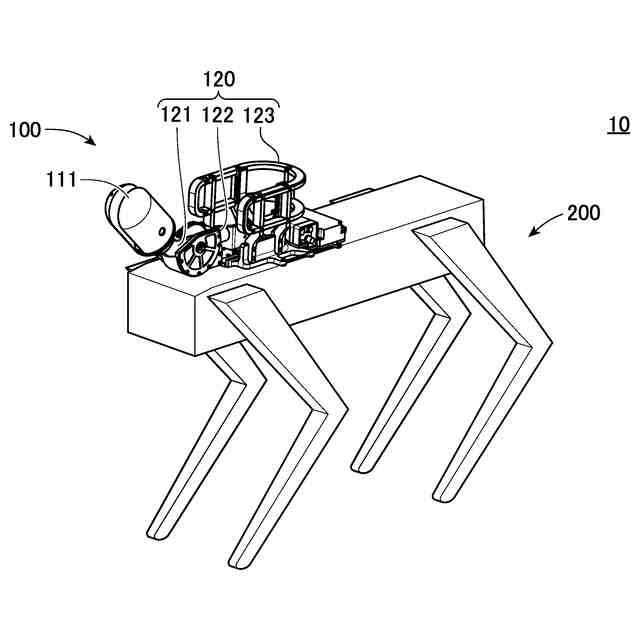
第1の実施形態に係る巡回装置の斜視図である。
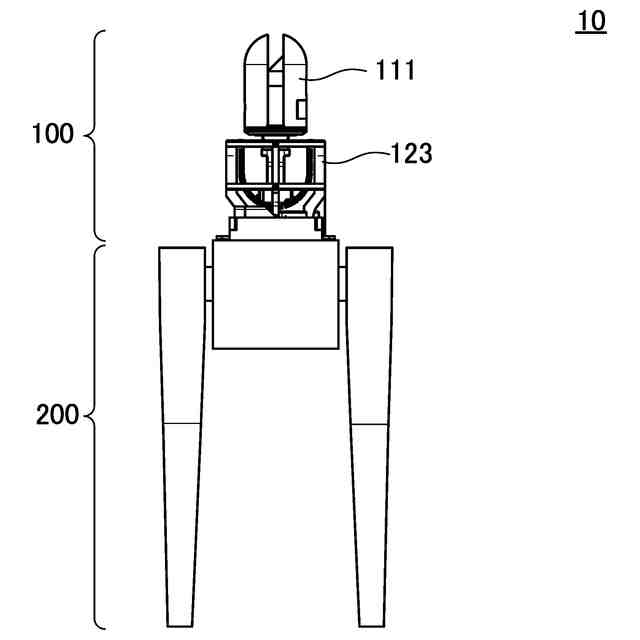
第1の実施形態に係る巡回装置の背面図である。
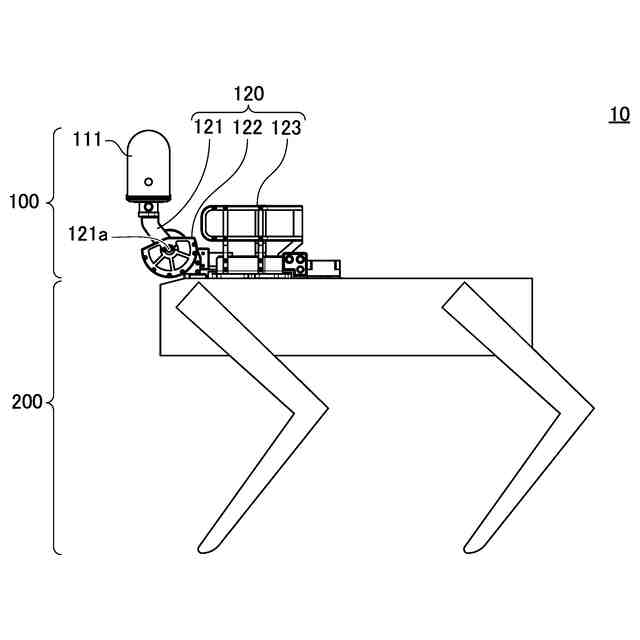
第1の実施形態に係る巡回装置の側面図である。
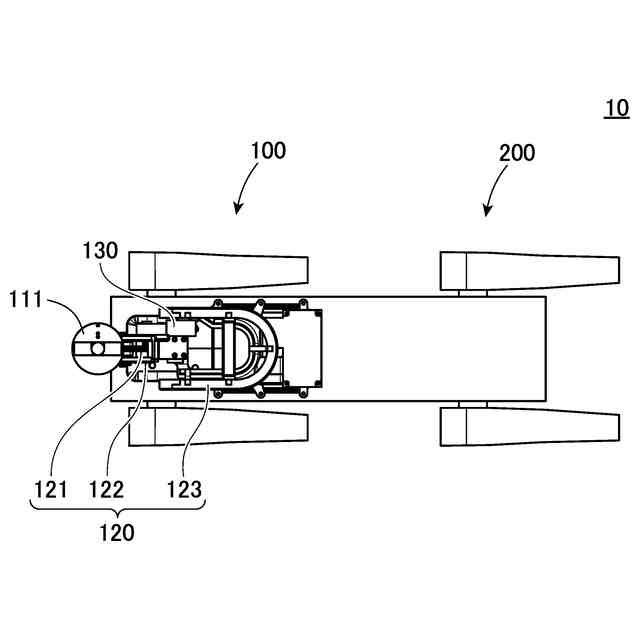
第1の実施形態に係る巡回装置の平面図である。
計測中の第1の実施形態に係る巡回装置の斜視図である。
計測中の第1の実施形態に係る巡回装置の平面図である。
移動中の第1の実施形態に係る巡回装置の斜視図である。
移動中の第1の実施形態に係る巡回装置の背面図である。
移動中の第1の実施形態に係る巡回装置の側面図である。
第1の実施形態に係る巡回装置の保護部材の構造を示す図である。
第1の実施形態に係る巡回装置の姿勢調整機構の変形例を示す図である。
第1の実施形態に係る巡回装置の姿勢調整機構の変形例を示す別の図である。
第2の実施形態に係る巡回装置の斜視図である。
第2の実施形態に係る巡回装置の背面図である。
第2の実施形態に係る巡回装置の側面図である。
第2の実施形態に係る巡回装置の平面図である。
計測中の第2の実施形態に係る巡回装置の斜視図である。
計測中の第2の実施形態に係る巡回装置の斜視図である。
計測中の第2の実施形態に係る巡回装置の斜視図である。
【発明を実施するための形態】
【0009】
(第1の実施形態)
図1は、本実施形態に係るシステムの構成を例示した図である。図2は、本実施形態に係るシステムに含まれる巡回装置の構成を例示した図である。図1に示すシステム1は、図2に示す巡回装置10を活用して巡回業務を行うシステムである。図1及び図2を参照しながら、システム1の構成について説明する。
【0010】
以下では、巡回業務が安全管理や進捗管理などを目的として工事現場で行われる場合を例に説明するが、巡回業務が行われる場所は、工事現場に限らない。例えば、屋外施設や屋内施設の警備等の目的で行われる巡回業務に適用してもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社フジタ
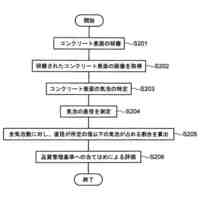
コンクリート構造物の評価方法
11日前
積水樹脂株式会社
磁性シート
1か月前
個人
車両レバー操作装置
1か月前
株式会社豊田自動織機
自動走行体
2か月前
株式会社豊田自動織機
無人走行体
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
1か月前
株式会社熊谷組
巡回ルート作成装置
1か月前
トヨタ自動車株式会社
搬送ロボット
11日前
トヨタ自動車株式会社
搬送システム
21日前
オムロン株式会社
自律作業システム
1か月前
株式会社ダイヘン
電力変換装置
1か月前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
ロボットシステム
21日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社栗本鐵工所
操作装置
12日前
株式会社FUJI
工作機械の操作システム
4日前
株式会社デンソー
電子制御装置
2か月前
東芝ライテック株式会社
管理システム
1か月前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
21日前
株式会社フカデン
外周部加工システム
2か月前
株式会社ダイフク
物品搬送設備
1か月前
日立建機株式会社
自律走行システム
2か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
大阪瓦斯株式会社
二次圧制御機構
2か月前
株式会社デンソー
移動体制御装置
2か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
アズビル株式会社
診断システムおよび診断方法
1か月前
大阪瓦斯株式会社
二次圧制御機構
2か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
11日前
トヨタ自動車株式会社
操作装置及び移動ロボット
19日前
本田技研工業株式会社
運転補助装置
1か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ