TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024120216
公報種別
公開特許公報(A)
公開日
2024-09-05
出願番号
2023026861
出願日
2023-02-24
発明の名称
ハンドリング装置、ハンドリング方法及びプログラム
出願人
株式会社東芝
代理人
弁理士法人酒井国際特許事務所
主分類
B25J
13/08 20060101AFI20240829BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】対象物をピッキングする姿勢をより容易に推定する。
【解決手段】実施形態のハンドリング装置は、面情報算出部と投影変換部と姿勢算出部と逆投影変換部と最終姿勢算出部とを備える。面情報算出部は、第1学習モデルを用いて、対象物の面情報を算出する。投影変換部は、面情報から、入力画像又は特徴マップに含まれる1以上の面を特定し、入力画像又は特徴マップを、1以上の面それぞれにある点の法線方向の上方の視点から見た1以上の投影画像へ変換する。姿勢算出部は、1以上の投影画像のそれぞれで、対象物を把持する把持姿勢を推定する第2学習モデルを用いて、把持姿勢を算出する。逆投影変換部は、1以上の投影画像上で算出された把持姿勢を、第1座標系における把持姿勢に変換する。最終姿勢算出部は、第1座標系における把持姿勢を、入力画像又は特徴マップへ投影することによって、対象物を把持するピッキングツール部の最終姿勢を算出する。
【選択図】図5
特許請求の範囲
【請求項1】
対象物を含む入力画像から算出された前記入力画像の特徴を示す特徴マップから前記対象物の面情報を推定する第1学習モデルを用いて、前記対象物の面情報を算出する面情報算出部と、
前記面情報から、前記入力画像又は前記特徴マップに含まれる1以上の面を特定し、前記入力画像又は前記特徴マップを、前記1以上の面それぞれにある点の法線方向の上方の視点から見た1以上の投影画像又は投影特徴マップへ変換する投影変換部と、
前記1以上の投影画像又は投影特徴マップのそれぞれで、前記対象物を把持する把持姿勢を推定する第2学習モデルを用いて、前記把持姿勢を算出する姿勢算出部と、
前記1以上の投影画像又は投影特徴マップ上で算出された把持姿勢を、第1座標系における把持姿勢に変換する逆投影変換部と、
前記第1座標系における把持姿勢を、前記入力画像又は前記特徴マップへ投影することによって、前記対象物を把持するピッキングツール部の最終姿勢を算出する最終姿勢算出部と、
を備えるハンドリング装置。
続きを表示(約 1,700 文字)
【請求項2】
前記第1座標系は、原点から見た空間を表すワールド座標系であり、
前記第1座標系における把持姿勢は、前記第1座標系における位置を示す3次元座標、前記第1座標系のx軸と前記ピッキングツール部を基準にしたローカル座標を示す第2座標系のX軸とのなす角、前記第1座標系のy軸と前記第2座標系のY軸とのなす角、及び、前記第1座標系のz軸と前記第2座標系のZ軸とのなす角を含む、
請求項1に記載のハンドリング装置。
【請求項3】
前記投影変換部は、前記面情報に基づき、前記入力画像を撮像したカメラのカメラ座標を示す第3座標系から、前記1以上の面それぞれの座標系を示す第4座標系への投影変換行列を作り、前記投影変換行列によって、前記入力画像又は前記特徴マップの投影変換を行い、前記投影画像又は投影特徴マップの座標系を示す第5座標系における座標値を算出することによって、前記投影画像を生成する、
請求項1又は2に記載のハンドリング装置。
【請求項4】
前記逆投影変換部は、前記投影変換行列と、前記1以上の投影画像上で算出された把持姿勢とに基づいて逆投影変換行列を算出し、前記第5座標系で表された把持姿勢を、前記第1座標系で表された把持姿勢に変換する、
請求項3に記載のハンドリング装置。
【請求項5】
前記ピッキングツール部は、複数の吸着パッドを持ち、
前記最終姿勢算出部は、前記入力画像又は前記特徴マップ上で表された前記ピッキングツール部の最終姿勢を示す領域と、前記面情報から特定される面領域とのAND計算によって、前記面領域に当てる吸着パッドをONに決定し、前記面領域に当てていない吸着パッドをOFFに決定する、
請求項1又は2に記載のハンドリング装置。
【請求項6】
ハンドリング装置が、対象物を含む入力画像から算出された前記入力画像の特徴を示す特徴マップから前記対象物の面情報を推定する第1学習モデルを用いて、前記対象物の面情報を算出するステップと、
前記ハンドリング装置が、前記面情報から、前記入力画像又は前記特徴マップに含まれる1以上の面を特定し、前記入力画像又は前記特徴マップを、前記1以上の面それぞれにある点の法線方向の上方の視点から見た1以上の投影画像へ変換するステップと、
前記ハンドリング装置が、前記1以上の投影画像のそれぞれで、前記対象物を把持する把持姿勢を推定する第2学習モデルを用いて、前記把持姿勢を算出するステップと、
前記ハンドリング装置が、前記1以上の投影画像上で算出された把持姿勢を、第1座標系における把持姿勢に変換するステップと、
前記ハンドリング装置が、前記第1座標系における把持姿勢を、前記入力画像又は前記特徴マップへ投影することによって、前記対象物を把持するピッキングツール部の最終姿勢を算出するステップと、
を含むハンドリング方法。
【請求項7】
コンピュータを、
対象物を含む入力画像から算出された前記入力画像の特徴を示す特徴マップから前記対象物の面情報を推定する第1学習モデルを用いて、前記対象物の面情報を算出する面情報算出部と、
前記面情報から、前記入力画像又は前記特徴マップに含まれる1以上の面を特定し、前記入力画像又は前記特徴マップを、前記1以上の面それぞれにある点の法線方向の上方の視点から見た1以上の投影画像へ変換する投影変換部と、
前記1以上の投影画像のそれぞれで、前記対象物を把持する把持姿勢を推定する第2学習モデルを用いて、前記把持姿勢を算出する姿勢算出部と、
前記1以上の投影画像上で算出された把持姿勢を、第1座標系における把持姿勢に変換する逆投影変換部と、
前記第1座標系における把持姿勢を、前記入力画像又は前記特徴マップへ投影することによって、前記対象物を把持するピッキングツール部の最終姿勢を算出する最終姿勢算出部、
として機能させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態はハンドリング装置、ハンドリング方法及びプログラムに関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
物流倉庫でバラ積みされた荷物などを扱うピッキング自動化システムなど、物体ハンドリング作業を自動化するロボットシステムが従来から知られている。このようなロボットシステムは、画像情報等のセンサデータを基に、物体の把持位置や姿勢、投入先の箱詰め位置や姿勢を自動的に算出し、把持機構を持つロボットが実際に把持や箱詰めを実行する。近年では、機械学習技術の発展により、学習によって、ロボットの適切な動作を実現する技術が利用されている。
【先行技術文献】
【特許文献】
【0003】
特開2021-88019号公報
特許第7000213号公報
特許第6036662号公報
特開2017-30135号公報
特開2018-202550号公報
特開2021-61014号公報
特開2020-77231号公報
【非特許文献】
【0004】
Mousavian et al.(2019).6-dof graspnet:Variational grasp generation for object manipulation. In Proceedings of the IEEE/CVF International Conference on Computer Vision(pp.2901-2910)
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかしながら、従来の技術では、対象物をピッキングする姿勢をより容易に推定することが難しかった。
【課題を解決するための手段】
【0006】
実施形態のハンドリング装置は、面情報算出部と投影変換部と姿勢算出部と逆投影変換部と最終姿勢算出部とを備える。面情報算出部は、対象物を含む入力画像から算出された前記入力画像の特徴を示す特徴マップから前記対象物の面情報を推定する第1学習モデルを用いて、前記対象物の面情報を算出する。投影変換部は、前記面情報から、前記入力画像又は前記特徴マップに含まれる1以上の面を特定し、前記入力画像又は前記特徴マップを、前記1以上の面それぞれにある点の法線方向の上方の視点から見た1以上の投影画像又は投影特徴マップへ変換する。姿勢算出部は、前記1以上の投影画像又は投影特徴マップのそれぞれで、前記対象物を把持する把持姿勢を推定する第2学習モデルを用いて、前記把持姿勢を算出する。逆投影変換部は、前記1以上の投影画像又は投影特徴マップ上で算出された把持姿勢を、第1座標系における把持姿勢に変換する。最終姿勢算出部は、前記第1座標系における把持姿勢を、前記入力画像又は前記特徴マップへ投影することによって、前記対象物を把持するピッキングツール部の最終姿勢を算出する。
【図面の簡単な説明】
【0007】
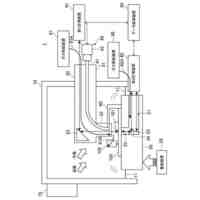
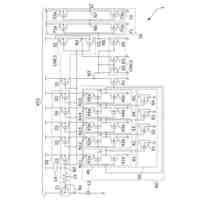
実施形態のハンドリングシステム100の構成の例を示す図。
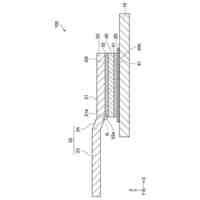
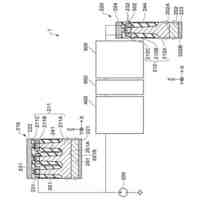
実施形態のピッキングツール部の例1を示す図。
実施形態のピッキングツール部の例2を示す図。
実施形態のピッキングツール部の例3を示す図。
実施形態のピッキングツール部の例4を示す図。
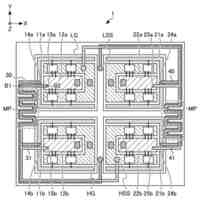
実施形態のピッキングツール情報の例を示す図。
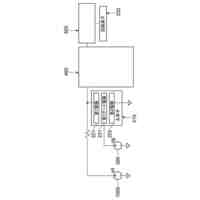
実施形態のコントローラの機能構成の例を示す図。
実施形態の計画部の機能構成の例を示す図。
実施形態の最終姿勢算出の方式1の処理例を示す図。
実施形態の最終姿勢算出の方式2の処理例を示す図。
実施形態の把持姿勢の投影画像上の表現の例1(吸着型の場合)を示す図。
実施形態の把持姿勢の投影画像上の表現の例2(把持型の場合)を示す図。
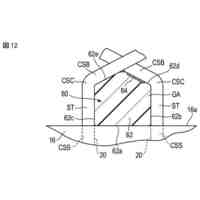
実施形態の吸着把持姿勢の例を示す図。
実施形態のハンドリング方法の例を示すフローチャート。
実施形態のコントローラのハードウェア構成の例を示す図。
【発明を実施するための形態】
【0008】
以下に添付図面を参照して、ハンドリング装置、ハンドリング方法及びプログラムの実施形態を詳細に説明する。
【0009】
従来は、例えば対象物の真上から、対象物を把持することが想定されており、画像情報に基づいて、ニューラルネットワークで把持可能な姿勢の画像上の表現(例えば、把持位置の画像座標、及び、把持姿勢の画像水平軸とのなす角)を推定する事例は多い。しかしながら、真上以外から取る場合は、原点から見た空間を表すワールド座標系における6D姿勢を計算する必要がある。ニューラルネットワークで全ての把持対象物の6D姿勢を一気に推定することは難しく、把持候補姿勢のsamplerを設計または学習することが必要とされていた(非特許文献1)。
【0010】
はじめに、物体ハンドリングロボットの一例であるハンドリング装置(ピッキングロボット)とロボット統合管理システムとを備えるハンドリングシステムの概要について説明する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
センサ
1か月前
株式会社東芝
発券機
1か月前
株式会社東芝
試験装置
1か月前
株式会社東芝
回転電機
2日前
株式会社東芝
受光装置
24日前
株式会社東芝
回転電機
1か月前
株式会社東芝
電解装置
25日前
株式会社東芝
回転電機
2日前
株式会社東芝
発振回路
22日前
株式会社東芝
測距装置
29日前
株式会社東芝
回転電機
24日前
株式会社東芝
回転電機
2日前
株式会社東芝
回転電機
24日前
株式会社東芝
回転電機
24日前
株式会社東芝
半導体装置
23日前
株式会社東芝
半導体装置
23日前
株式会社東芝
半導体装置
23日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
23日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
22日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
真空バルブ
18日前
株式会社東芝
半導体装置
1か月前
株式会社東芝
半導体装置
23日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
23日前
株式会社東芝
半導体装置
25日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
29日前
株式会社東芝
半導体装置
29日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ