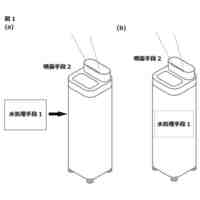
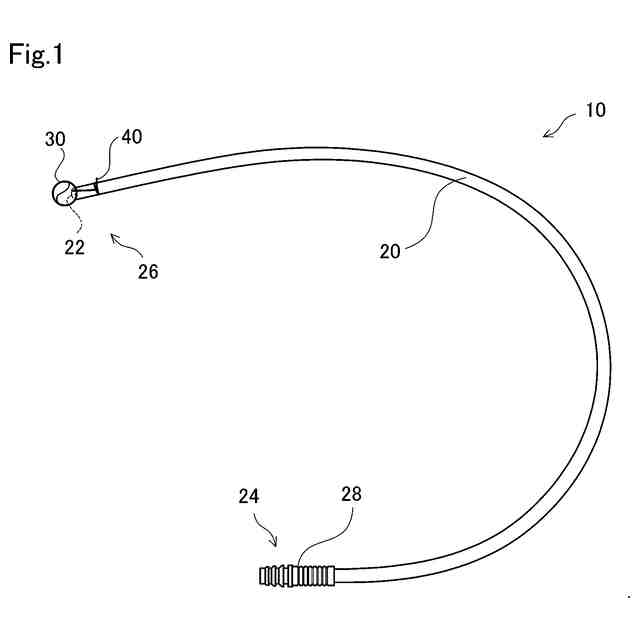
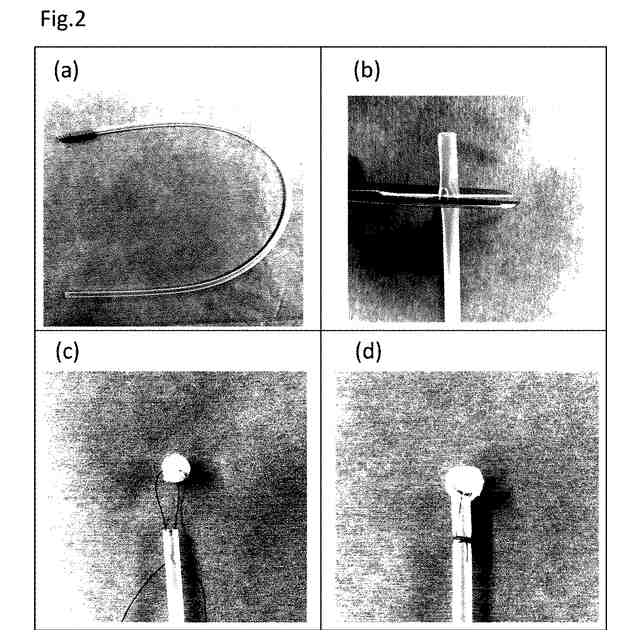
発明の詳細な説明【技術分野】 【0001】 本開示は、吸引器具に関する。 続きを表示(約 1,600 文字)【背景技術】 【0002】 近年、手術支援ロボットを用いて遠隔操作によって鏡視下手術が行われることがある。手術時には、血液や組織液等の体液や洗浄液等の液体を吸引しながら手術が行われることが望まれる。従来法としての医師の手によって直接的に行われる手術と同様に、ロボット手術の場合においても、助手が吸引管等を用いて手動で吸引操作を行うことがある(例えば、非特許文献1)。また、例えば、非特許文献2には、金属製の吸引嘴管が装着された吸引カテーテルが提案されている。 【先行技術文献】 【非特許文献】 【0003】 Raheem S et al., Variability and interpretation of communication taxonomy during robot-assisted surgery: do we all speak the same language? BJU Int. 2018 Jul;122(1):99-105 Tsuruta K et al., Easy Suction Technique During Robotic-Assisted Thoracoscopic Lobectomy. Ann Thorac Surg., 2021 Nov;112(5) 【発明の概要】 【発明が解決しようとする課題】 【0004】 助手によって手動で吸引操作を行う場合には、骨や臓器等との干渉が起こりやすく、所望の部位に吸引管を誘導して吸引することが困難であった。また、非特許文献2に記載の技術によれば、金属製の吸引嘴管を用いるため、組織を傷つけないように注意を要する。このような課題は、ロボット支援下手術に限らず、全ての鏡視下手術において共通する課題であった。このため、鏡視下手術の吸引操作に用いることのできる新たな技術が求められていた。 【課題を解決するための手段】 【0005】 本発明は、以下の形態として実現することが可能である。 【0006】 (1)本発明の一形態によれば、鏡視下手術に用いられる吸引器具が提供される。この吸引器具は、可撓性を有し、一端が吸引装置と接続されるチューブと、前記チューブの他端において前記チューブの孔を被覆する多孔質部材と、を備え、前記多孔質部材は、液体を吸収可能、且つ、液体を透過可能である。この形態の吸引器具によれば、液体を吸収および透過可能な多孔質部材によってチューブの孔が被覆されているので、鏡視下手術の吸引操作に用いることができる。 【0007】 (2)上記(1)に記載の吸引器具において、前記多孔質部材は、ガーゼと、スポンジと、からなる群より選ばれる少なくとも一種であってもよい。この形態の吸引器具によれば、多孔質部材を介して液体を吸引する構成を実現できる。 【0008】 (3)上記(1)または上記(2)に記載の吸引器具において、前記多孔質部材は、前記チューブの他端と接着されていてもよい。この形態の吸引器具によれば、多孔質部材とチューブとの結合強度が低下することを抑制できる。 【0009】 (4)上記(1)または上記(2)に記載の吸引器具において、前記多孔質部材は、糸によって、前記チューブの他端と縫い合わされていてもよい。この形態の吸引器具によれば、多孔質部材とチューブとが外れてしまうことを抑制できる。 【0010】 (5)上記(1)から上記(4)までのいずれか一項に記載の吸引器具において、前記多孔質部材は、5mm以上10mm以下の径を有する球形であってもよい。この形態の吸引器具によれば、吸引圧が低下することを抑制しつつ、吸引部分が過度に大きくなることを抑制できる。 (【0011】以降は省略されています) この特許をJ-PlatPatで参照する


 特許ウォッチ
特許ウォッチ