TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024117014
公報種別
公開特許公報(A)
公開日
2024-08-28
出願番号
2023022927
出願日
2023-02-16
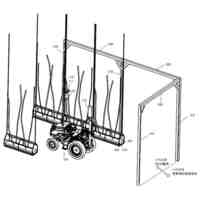
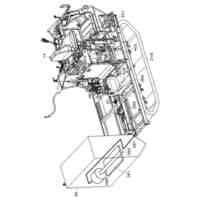
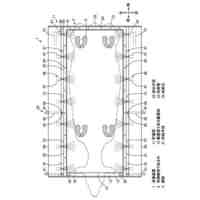
発明の名称
草刈機
出願人
トヨタ自動車株式会社
代理人
弁理士法人太陽国際特許事務所
主分類
A01D
34/64 20060101AFI20240821BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
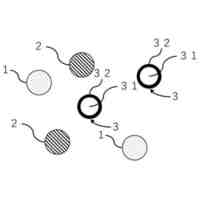
【課題】刈刃用モータへの過負荷を抑制することができる草刈機を得る。
【解決手段】草刈機は、草刈機本体と情報取得部50と負荷予測部52と経路設定部53と駆動用モータ制御部54とを含む。草刈機本体は移動機構を駆動する駆動用モータと草を刈り取る刈刃を駆動する刈刃用モータとを有する。情報取得部50は、草刈り対象領域における草の生育状況に関する情報を取得する。負荷予測部52は、生育状況に関する情報に基づいて草を刈った際の刈刃用モータへかかる負荷を予測する。経路設定部53は、予測された負荷に基づいて走行経路を設定する。駆動用モータ制御部54は、設定された走行経路に沿って草刈機本体が走行するように駆動用モータを駆動制御する。
【選択図】図4
特許請求の範囲
【請求項1】
移動機構を駆動する駆動用モータと草を刈り取る刈刃を駆動する刈刃用モータとを有する草刈機本体と、
草刈り対象領域における草の生育状況に関する情報を取得する情報取得部と、
該情報取得部により取得された前記生育状況に関する情報に基づいて前記草を刈った際の前記刈刃用モータへかかる負荷を予測する負荷予測部と、
該負荷予測部により予測された前記負荷に基づいて走行経路を設定する経路設定部と、
該経路設定部により設定された前記走行経路に沿って前記草刈機本体が走行するように前記駆動用モータを駆動制御する駆動用モータ制御部と、
を含む草刈機。
続きを表示(約 250 文字)
【請求項2】
前記経路設定部は、前記負荷の累積値が所定の閾値を超えないように前記走行経路を設定する請求項1に記載の草刈機。
【請求項3】
前記経路設定部は、前記負荷の最大値が所定の閾値を超えないように前記走行経路を設定する請求項1に記載の草刈機。
【請求項4】
前記経路設定部は、前記草刈り対象領域に対して初期走行経路を設定し、前記負荷予測部により予測された前記負荷に基づいて前記初期走行経路を補正することにより前記走行経路を設定する請求項1に記載の草刈機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、草刈機に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
特許文献1には、蛇行しながら草刈りを行うことで、刈刃用モータへの負荷を減少させる自走式草刈機が開示されており、刈刃用モータの負荷が上昇した際に、蛇行しながら草刈りを行う方法に切替えることが記載されている。
【先行技術文献】
【特許文献】
【0003】
国際公開2017/154524号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
自走式草刈機においては、常時蛇行運転させると草刈りの効率が低下してしまう。一方、特許文献1に記載された草刈機のように、刈刃用モータの負荷に応じて運転モードを切り替える場合、刈刃用モータへの負荷が大きくなってから蛇行モードに切り替えるため、刈刃用モータが過負荷となってしまう場合がある。
【0005】
本発明は上記事実を考慮し、刈刃用モータへの過負荷を抑制することができる草刈機を得ることを目的とする。
【課題を解決するための手段】
【0006】
請求項1に記載の本発明に係る草刈機は、移動機構を駆動する駆動用モータと草を刈り取る刈刃を駆動する刈刃用モータとを有する草刈機本体と、草刈り対象領域における草の生育状況に関する情報を取得する情報取得部と、該情報取得部により取得された前記生育状況に関する情報に基づいて前記草を刈った際の前記刈刃用モータへかかる負荷を予測する負荷予測部と、該負荷予測部により予測された前記負荷に基づいて走行経路を設定する経路設定部と、該経路設定部により設定された前記走行経路に沿って前記草刈機本体が走行するように前記駆動用モータを駆動制御する駆動用モータ制御部と、を含む。
【0007】
請求項1に記載の本発明に係る草刈機では、草刈り対象領域における草の生育状況に関する情報を取得し、取得された情報に基づいて草を刈った際の刈刃用モータへかかる負荷を予測して、予測された負荷に基づいて走行経路が設定されている。そのため、予め刈刃用モータにかかる負荷を考慮し、刈刃用モータへかかる負荷が過負荷にならない走行経路を設定することにより、刈刃用モータへの過負荷を抑制することができる。
【0008】
請求項2に記載の本発明に係る草刈機は、請求項1に記載の構成において、前記経路設定部は、前記負荷の累積値が所定の閾値を超えないように前記走行経路を設定する。
【0009】
請求項2に記載の本発明に係る草刈機では、経路設定部が、負荷の累積値が所定の閾値を超えないように走行経路を設定しているので、刈刃用モータの疲労破壊を抑制することができる。
【0010】
請求項3に記載の本発明に係る草刈機は、請求項1に記載の構成において、前記経路設定部は、前記負荷の最大値が所定の閾値を超えないように前記走行経路を設定する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
捕獲器
1か月前
個人
育成シート
26日前
個人
釣り用錘り
10日前
個人
釣り用指サック
13日前
井関農機株式会社
作業機
9日前
個人
ペット用オムツカバー
3日前
株式会社シマノ
蓋栓
2日前
井関農機株式会社
作業車両
6日前
井関農機株式会社
運搬作業車両
1か月前
井関農機株式会社
作業車両
1か月前
井関農機株式会社
作業車両
12日前
株式会社大貴
動物用トイレ
10日前
株式会社 林物産発明研究所
草取機
1か月前
株式会社 林物産発明研究所
草取機
1か月前
セイカン株式会社
耕作作業刃
23日前
株式会社アクト
消毒装置
1か月前
株式会社リレイション
猫用絵本
3日前
個人
穂先先端部釣糸導入孔中通し釣竿
12日前
個人
容器入り過酢酸生成組成物
1か月前
マルキユー株式会社
釣り用ルアー
13日前
RUDIE’S株式会社
釣り用錘
6日前
トヨタ自動車株式会社
自走草刈機
1か月前
井関農機株式会社
コンバイン
1か月前
房総プラント株式会社
動物捕獲用檻
13日前
株式会社小川農具製作所
穴明け装置
12日前
株式会社マキシム
植物栽培システム
25日前
株式会社大阪製薬
ダニ防除剤
3日前
有限会社ルミエール
有害動物忌避装置
10日前
株式会社 林物産発明研究所
災害対応植木鉢
1か月前
アクシオヘリックス株式会社
収穫装置
19日前
AGRIST株式会社
圃場管理システム
10日前
個人
ヤエンとヤエンを使用してイカを釣る方法
1か月前
株式会社ナノジャパン
緑化材
1か月前
伊東電機株式会社
植物保持具出し入れ装置
1か月前
株式会社クボタ
歩行型作業機
1か月前
株式会社クボタ
歩行型管理機
20日前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ