TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024115267
公報種別
公開特許公報(A)
公開日
2024-08-26
出願番号
2023020877
出願日
2023-02-14
発明の名称
歩行型管理機
出願人
株式会社クボタ
代理人
弁理士法人R&C
主分類
A01B
33/08 20060101AFI20240819BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】耕耘ロータリと、耕耘ロータリに動力伝達するクラッチを操作するクラッチレバーが操縦ハンドルの横向き杆部と共握りされるデッドマンレバーである歩行型管理機において、機体のダッシュを防止し易くする。
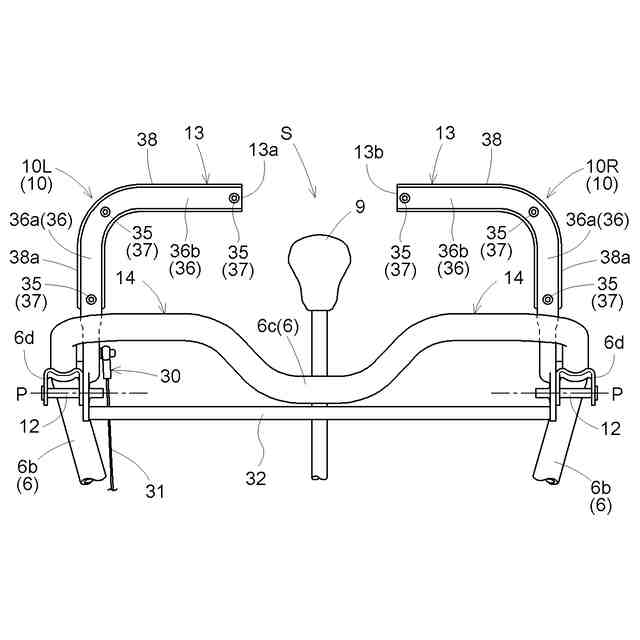
【解決手段】操縦ハンドル6の横向き杆部6cにおけるハンドル握り部14が親指41によって握られ、主クラッチレバー10のレバー握り部13が四指42によって握られる。レバー握り部13のうちの四指42で握られる四指握り部38の曲率半径R2がハンドル握り部14のうちの親指41によって握られる親指握り部40の曲率半径R1よりも大である。
【選択図】図5
特許請求の範囲
【請求項1】
機体と、
前記機体から後方に延ばされ、左右の前後向き杆部、および、前記左右の前後向き杆部の後部を連結する横向き杆部を備える操縦ハンドルと、
耕耘ロータリと、
前記耕耘ロータリに動力伝達するクラッチ入り状態と前記耕耘ロータリに対する動力伝達を絶つクラッチ切り状態とに切換え可能なクラッチと、
前記機体の左右方向に延びる枢支軸芯を揺動支点にして揺動可能な状態で前記操縦ハンドルに支持され、前記クラッチを切換え操作する主クラッチレバーと、が備えられ、
前記主クラッチレバーは、前記主クラッチレバーのレバー握り部が前記横向き杆部に位置するハンドル握り部と共に握り操作されることでクラッチ入り状態に操作され、前記レバー握り部と前記ハンドル握り部との共握りが解除されると切り付勢力によって前記レバー握り部が前記ハンドル握り部から前方に離間操作されてクラッチ切り状態に操作されるデッドマンレバーであり、
前記ハンドル握り部は、手のうちの親指によって握られるように構成され、
前記レバー握り部は、手のうちの親指以外の四指によって握られるように構成され、
前記レバー握り部のうち、前記四指によって握られる四指握り部の前記枢支軸芯に沿う方向視での曲率半径が、前記ハンドル握り部のうち、前記親指によって握られる親指握り部における前記枢支軸芯に沿う方向視での曲率半径よりも大きく設定されている歩行型管理機。
続きを表示(約 230 文字)
【請求項2】
前記レバー握り部のうち、前記レバー握り部と前記ハンドル握り部とが共に握り操作されたときに前記四指握り部よりも前側に位置する前端部分が、前記レバー握り部と前記ハンドル握り部とが共に握り操作されると前下向きに傾斜する請求項1に記載の歩行型管理機。
【請求項3】
前記親指握り部は、下向きであり、
前記四指握り部は、前記レバー握り部と前記ハンドル握り部とが共に握り操作されるときに上向きになる請求項1に記載の歩行型管理機。
発明の詳細な説明
【技術分野】
【0001】
本発明は、歩行型管理機に関する。
続きを表示(約 2,200 文字)
【背景技術】
【0002】
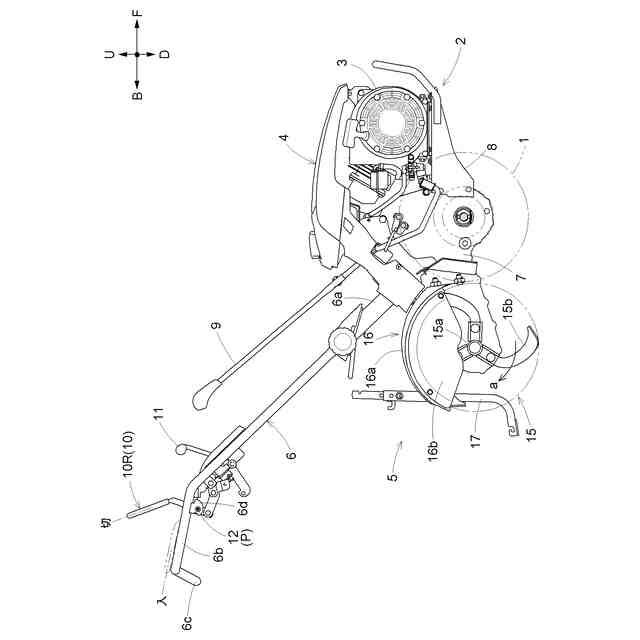
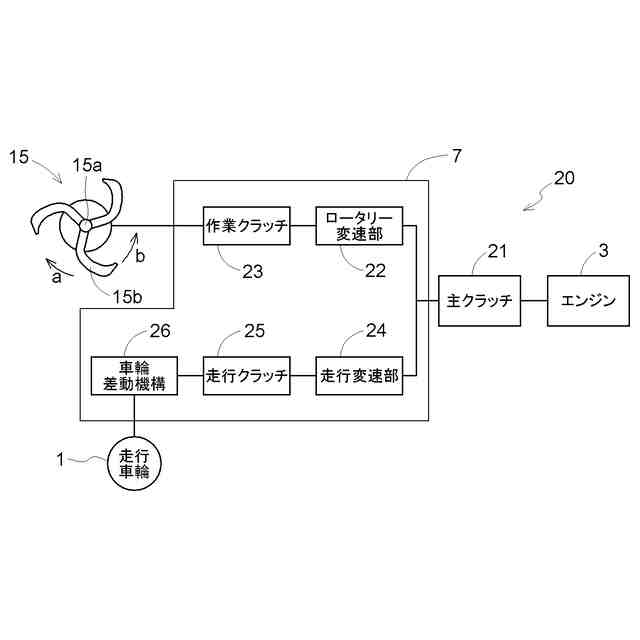
特許文献1に示されるように、機体(車体フレーム)と、機体から後方に延ばされた操縦ハンドル(操向ハンドル)と、耕耘ロータリ(耕耘軸、耕耘爪)と、耕耘ロータリに動力伝達するクラッチ入り状態と耕耘ロータリに対する動力伝達を絶つクラッチ切り状態とに切換え可能なクラッチ(メインクラッチ機構)と、機体の左右方向に延びる枢支軸芯を揺動支点にして揺動可能な状態で操縦ハンドルに支持され、クラッチを切換え操作する主クラッチレバー(デッドマンクラッチレバー)と、が備えられた歩行型管理機がある。
【0003】
この歩行型管理機では、操縦ハンドルは、左右の前後向き杆部(左右一対の連結バー)、および、左右の前後向き杆部の後部を連結する横向き杆部(幅方向把持バー)を備えている。主クラッチレバーは、主クラッチレバーのレバー握り部(幅方向バー)を操縦ハンドルの横向き杆部に位置するハンドル握り部(幅方向把持バー)と共に握り操作されることでクラッチ入り状態(クラッチ係合位置)に操作され、レバー握り部のハンドル握り部との共握りが解除されると切り付勢力によってクラッチ切り状態(クラッチ解除位置)に操作されるデッドマンレバーにされている。
【先行技術文献】
【特許文献】
【0004】
特開2015-97491号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
この種の歩行型管理機では、圃場に土が硬い部分があると、耕耘ロータリが土中に入り込み難くて耕耘反力によって地面側に位置し、耕耘ロータリが走行すること、いわゆる機体がダッシュすることがある。主クラッチレバーを操縦ハンドルの横向き杆部と共に握ることによってクラッチをクラッチ入り状態に維持するものでありながら、機体のダッシュを防止し易いことが要望されている。
【0006】
本発明は、主クラッチレバーを操縦ハンドルの横向き杆部と共に握ることによってクラッチをクラッチ入り状態に維持するものでありながら、機体のダッシュを防止し易い歩行型管理機を提供する。
【課題を解決するための手段】
【0007】
本発明による歩行型管理機は
機体と、前記機体から後方に延ばされ、左右の前後向き杆部、および、前記左右の前後向き杆部の後部を連結する横向き杆部を備える操縦ハンドルと、耕耘ロータリと、前記耕耘ロータリに動力伝達するクラッチ入り状態と前記耕耘ロータリに対する動力伝達を絶つクラッチ切り状態とに切換え可能なクラッチと、前記機体の左右方向に延びる枢支軸芯を揺動支点にして揺動可能な状態で前記操縦ハンドルに支持され、前記クラッチを切換え操作する主クラッチレバーと、が備えられ、前記主クラッチレバーは、前記主クラッチレバーのレバー握り部が前記横向き杆部に位置するハンドル握り部と共に握り操作されることでクラッチ入り状態に操作され、前記レバー握り部と前記ハンドル握り部との共握りが解除されると切り付勢力によって前記レバー握り部が前記ハンドル握り部から前方に離間操作されてクラッチ切り状態に操作されるデッドマンレバーであり、前記ハンドル握り部は、手のうちの親指によって握られるように構成され、前記レバー握り部は、手のうちの親指以外の四指によって握られるように構成され、前記レバー握り部のうち、前記四指によって握られる四指握り部の前記枢支軸芯に沿う方向視での曲率半径が、前記ハンドル握り部のうち、前記親指によって握られる親指握り部における前記枢支軸芯に沿う方向視での曲率半径よりも大きく設定されている。
【0008】
本構成によると、主クラッチレバーは、主クラッチレバーのレバー握り部が横向き杆部に位置するハンドル握り部と共に握り操作されることでクラッチ入り状態に操作されるので、主クラッチレバーを操縦ハンドルの横向き杆部と共に握ることによってクラッチをクラッチ入り状態に維持することができる。主クラッチレバーは、レバー握り部とハンドル握り部との共握りが解除されると切り付勢力によってレバー握り部がハンドル握り部から前方に離間操作されてクラッチ切り状態に操作されるデッドマンレバーであるので、レバー握り部をハンドル握り部と共に握っている手からレバー握り部が外れると、クラッチがクラッチ切り状態になって耕耘ロータリが停止されるので機体のダッシュを防止できる。
【0009】
レバー握り部のうちの四指握り部の枢支軸芯に沿う方向視での曲率半径が、ハンドル握り部のうちの親指握り部における枢支軸芯に沿う方向視での曲率半径よりも大きく設定されているので、機体がダッシュしそうになってレバー握り部を手から外す方向の操作力がレバー握り部に掛かるとレバー握り部が手から外れ易いので、主クラッチレバーを操縦ハンドルの横向き杆部と共に握ってクラッチをクラッチ入り状態に維持するものでありながら、機体のダッシュを防止し易い。
【0010】
本発明においては、
前記レバー握り部のうち、前記レバー握り部と前記ハンドル握り部とが共に握り操作されたときに前記四指握り部よりも前側に位置する前端部分が、前記レバー握り部と前記ハンドル握り部とが共に握り操作されると前下向きに傾斜すると好適である。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
他の特許を見る



 特許ウォッチ
特許ウォッチ