TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024116861
公報種別
公開特許公報(A)
公開日
2024-08-28
出願番号
2023022688
出願日
2023-02-16
発明の名称
情報処理装置、ロボット、及びプログラム
出願人
日本信号株式会社
代理人
弁理士法人朝日特許事務所
主分類
G05D
1/43 20240101AFI20240821BHJP(制御;調整)
要約
【課題】ユーザにより行われる、地図データの領域を決めるための作業の負担を軽減するロボットを提供する。
【解決手段】移動するロボットがレーザスキャナで取得した第1地図データと、カメラで取得した画像に対するセマンティックセグメンテーションの実行結果と、カメラで取得した第2地図データとに基づいて、前記ロボットを移動させるエリアを決定する。
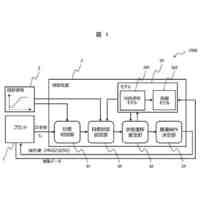
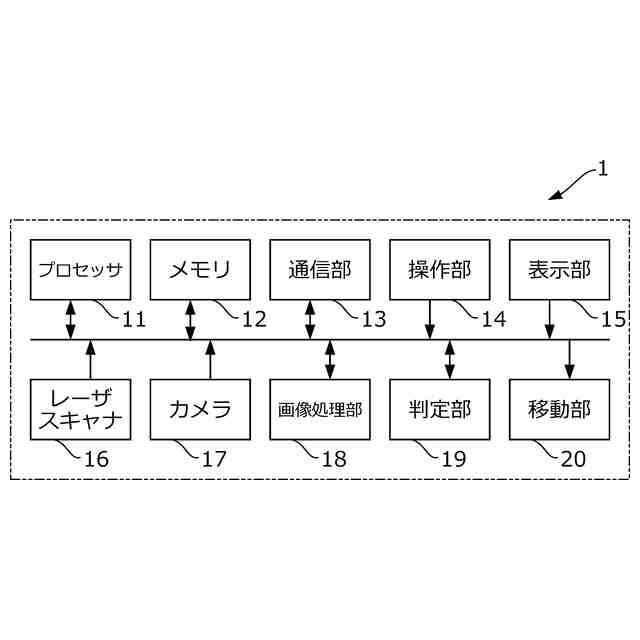
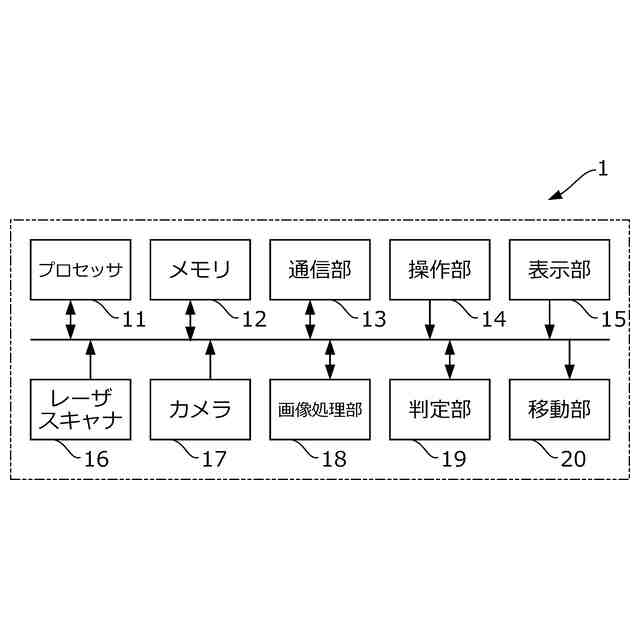
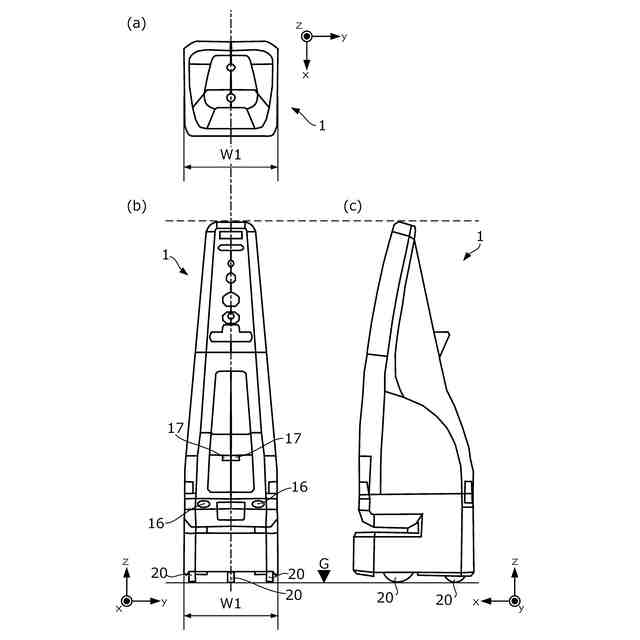
【選択図】図1
特許請求の範囲
【請求項1】
移動するロボットがレーザスキャナで取得した第1地図データと、カメラで取得した画像に対するセマンティックセグメンテーションの実行結果と、カメラで取得した第2地図データとに基づいて、前記ロボットを移動させるエリアを決定する情報処理装置。
続きを表示(約 720 文字)
【請求項2】
前記実行結果は、前記第1地図データ及び前記第2地図データを取得する必要のないエリアを示す情報を含む
請求項1に記載の情報処理装置。
【請求項3】
前記第1地図データ及び前記第2地図データは、前記ロボットが移動可能なエリアを示す情報を含む
請求項1に記載の情報処理装置。
【請求項4】
レーザスキャナと、カメラと、を有し、請求項1から3のいずれか1項に記載の情報処理装置により決定されたエリアを移動するロボット。
【請求項5】
前記レーザスキャナは、2次元レーザスキャナ又は3次元レーザスキャナであり、
前記カメラは、単眼カメラ又はステレオカメラである
請求項4に記載のロボット。
【請求項6】
前記レーザスキャナ及び前記カメラを同時に起動させ、起動時における前記ロボットの位置を前記第1地図データ及び前記第2地図データの原点とする
請求項4に記載のロボット。
【請求項7】
コンピュータに、
移動するロボットがレーザスキャナで取得した第1地図データを取得するステップと、
前記ロボットがカメラで取得した画像を取得するステップと、
前記画像に対してセマンティックセグメンテーションを実行するステップと、
カメラで取得した第2地図データを取得するステップと、
前記第1地図データ及び前記第2地図データと、前記セマンティックセグメンテーションの実行結果と、に基づいて、前記ロボットを移動させるエリアを決定するステップと、
を実行させるためのプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、自律走行を行うロボットの技術に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
ロボット自身に地図データを作成させる技術が知られている。例えば、特許文献1には、被作業面を撮像した撮像画像から被作業面上に存在するマーカを認識し、時系列に連続した撮像画像からマーカの移動軌跡を作成し、マーカの移動軌跡の内側を作業エリアに設定する自律走行作業装置が記載されている。
【先行技術文献】
【特許文献】
【0003】
特開2022-26429号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかし、上記技術は、ロボットが作成する地図データの領域を決めるために、ロボットに認識させるためのマーカを人手で配置する必要があった。
【0005】
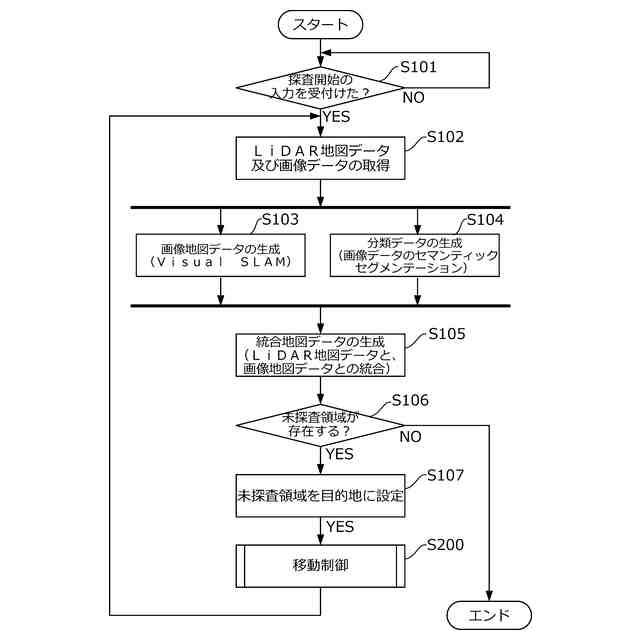
これに対し、本発明は、ロボットの内部に地図データがない状態で、ユーザにより行われる地図データの領域をロボット自身が判断しながら自律走行を行い、地図データを作成(以下、「探査」という。)するシステムを提供する。
【課題を解決するための手段】
【0006】
本発明は、移動するロボットがレーザスキャナで取得した第1地図データと、カメラで取得した画像に対するセマンティックセグメンテーションの実行結果と、カメラで取得した第2地図データとに基づいて、前記ロボットを移動させるエリアを決定する情報処理装置、を第1の態様として提供する。第1の態様の情報処理装置によれば、ユーザは地図データの領域をロボットに認識させるためのマーカ等を配置する必要がない。
【0007】
第1の態様の情報処理装置において、前記実行結果は、第1地図データ及び前記第2地図データを取得する必要のないエリアを示す情報を含む、という構成が第2の態様として採用されてもよい。第2の態様の情報処理装置によれば、ロボットは地図データを取得する必要のないエリアを認識することができる。
【0008】
第1の態様の情報処理装置において、前記第1地図データ及び前記第2地図データは、前記ロボットが移動可能なエリアを示す情報を含む、という構成が第3の態様として採用されてもよい。第3の態様の情報処理装置によれば、ロボットは移動可能なエリアを認識することができる。
【0009】
本発明は、レーザスキャナと、カメラと、を有し、請求項1から3のいずれか1項に記載の情報処理装置により決定されたエリアを移動するロボット、を第4の態様として提供する。第4の態様のロボットによれば、ユーザにより行われる、地図データの領域を決めるための作業の負担が軽減される。
【0010】
第4の態様のロボットにおいて、前記レーザスキャナは、2次元レーザスキャナ又は3次元レーザスキャナであり、前記カメラは、単眼カメラ又はステレオカメラである、という構成が第5の態様として採用されてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
積水樹脂株式会社
磁性シート
25日前
個人
車両レバー操作装置
25日前
株式会社豊田自動織機
自動走行体
1か月前
株式会社豊田自動織機
無人走行体
1か月前
エイブリック株式会社
基準電圧回路
1か月前
アズビル株式会社
設定システム
1か月前
エイブリック株式会社
基準電圧回路装置
28日前
株式会社熊谷組
巡回ルート作成装置
1か月前
オムロン株式会社
自律作業システム
1か月前
トヨタ自動車株式会社
搬送ロボット
4日前
トヨタ自動車株式会社
搬送システム
14日前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
シャントレギュレータ
1か月前
株式会社ダイヘン
電力変換装置
1か月前
エイブリック株式会社
ボルテージレギュレータ
1か月前
トヨタ自動車株式会社
ロボットシステム
14日前
オムロン株式会社
設計装置および設計方法
1か月前
株式会社栗本鐵工所
操作装置
5日前
東芝ライテック株式会社
管理システム
1か月前
株式会社ダイフク
物品搬送設備
14日前
株式会社FUJI
作業機の操作表示システム
1か月前
株式会社ダイフク
物品搬送設備
1か月前
株式会社デンソー
電子制御装置
1か月前
株式会社フカデン
外周部加工システム
2か月前
株式会社豊田自動織機
無人走行体の走行制御システム
1か月前
日立建機株式会社
自律走行システム
2か月前
株式会社栗本鐵工所
触覚提示装置
1か月前
株式会社デンソー
移動体制御装置
2か月前
CKD日機電装株式会社
モデルフリーポジカスト制御
4日前
アズビル株式会社
診断システムおよび診断方法
1か月前
本田技研工業株式会社
運転補助装置
28日前
株式会社豊田自動織機
移動体制御システム
25日前
横河電機株式会社
モジュール
27日前
トヨタ自動車株式会社
操作装置及び移動ロボット
12日前
株式会社日立製作所
制御装置、制御方法
1か月前
株式会社藤千商会
移動体制御システムおよび移動体
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ