TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024112209
公報種別
公開特許公報(A)
公開日
2024-08-20
出願番号
2023017128
出願日
2023-02-07
発明の名称
区分システム及び区分方法
出願人
株式会社東芝
,
東芝インフラシステムズ株式会社
代理人
弁理士法人鈴榮特許綜合事務所
主分類
B65G
47/46 20060101AFI20240813BHJP(運搬;包装;貯蔵;薄板状または線条材料の取扱い)
要約
【課題】1又は複数の物品を収容する容器の自動払い出し時に、処理効率を向上させる、区分システムを提供すること。
【解決手段】実施形態によれば、区分システムは、ソータと容器載置部と、自動移動装置とを備える。ソータは、物品を選択された容器に区分するソート部と、区分された容器を所定の搬送方向に搬送する容器払い出し用の搬送部とを有する。容器載置部は、搬送部に対して搬送部の搬送方向に交差する方向に隣接して配置され、複数の容器が載置される。自動移動装置は、搬送部及び容器載置部に対して近接及び離間可能に移動する自動移動部と、搬送部及び容器載置部に対して近接する位置において、複数の容器のうちから選択された容器を搬送部に対して押し出し又は引き込んで選択された容器を搬送部に載せる可動部とを有する。
【選択図】 図15
特許請求の範囲
【請求項1】
物品に付されたコードに基づいて前記物品を複数の容器のうちから選択された容器に区分するソート部と、前記ソート部で前記物品が区分された前記容器を所定の搬送方向に搬送する容器払い出し用の搬送部とを有する、ソータと、
前記搬送部に対して前記搬送部の前記搬送方向に交差する方向に隣接して配置され、前記複数の容器が載置される容器載置部と、
前記搬送部に対して前記容器載置部とは反対側に隣接する位置、又は、前記搬送部との間に前記容器載置部を挟むように前記容器載置部に近接する位置と、前記搬送部及び前記容器載置部から離間する位置との間を移動する自動移動装置と
を備え、
前記自動移動装置は、
前記搬送部及び前記容器載置部に対して近接及び離間可能に移動する自動移動部と、
前記搬送部及び前記容器載置部に対して近接する位置において、前記複数の容器のうちから選択された容器を前記搬送部に対して押し出し又は引き込んで前記選択された容器を前記搬送部に載せる可動部と
を有する、
区分システム。
続きを表示(約 1,100 文字)
【請求項2】
前記容器載置部は、前記複数の容器を載置する水平位置と、前記搬送部に前記複数の容器を同時期に載せるように傾斜させて前記複数の容器を滑らせる傾斜位置との間を移動可能なテーブルを備え、
前記自動移動装置の前記可動部は、前記テーブルを前記水平位置と前記傾斜位置との間を移動させる、
請求項1に記載の区分システム。
【請求項3】
前記ソート部は、
前記搬送部よりも上方に設けられ、前記物品が搬送される上側搬送部と、
前記選択された容器に、前記上側搬送部で搬送される前記物品を区分する案内部と
を有し、
前記案内部は、前記選択された容器の開口よりも上側に設けられる、
請求項1又は請求項2に記載の区分システム。
【請求項4】
前記ソータは、前記ソート部に設けられ、前記複数の容器に対し前記物品の堆積状態がある設定高さを超えたか否かを出力するセンサを備え、
前記区分システムは、前記センサの出力に基づいて前記設定高さを超えて前記物品が堆積された容器を出力するプロセッサを備え、
前記プロセッサは、前記自動移動装置の前記自動移動部及び前記可動部を制御し、前記プロセッサの出力に基づいて、
前記容器載置部に載置された前記容器に近接する位置に移動させ、前記可動部で前記容器を前記搬送部に押し出す、又は、
前記搬送部に近接し、前記容器載置部に載置された前記容器に前記搬送部を挟んで対向する位置に移動させ、前記可動部で前記容器を前記搬送部に引き込む
ように動作させる、
請求項1又は請求項2に記載の区分システム。
【請求項5】
容器載置部に並べられた複数の容器のうち、ある容器に所定量又は所定高さに物品を堆積させること、
前記ある容器に隣接する位置、又は、前記ある容器との間に前記ある容器を所定の搬送方向に搬送する搬送部を挟む位置に自動移動装置を移動させ、前記自動移動装置で押し出し又は引き込みによって前記ある容器を前記搬送部に載せること、
前記ある容器を載せた前記搬送部を動かし前記ある容器を所定の方向に払い出すこと、
を有する、区分方法。
【請求項6】
複数の容器が並べられて載置されたテーブルに自動移動装置を向かわせること、
前記自動移動装置を動作させて前記テーブルを傾斜させて、前記複数の容器を所定の方向に払い出す搬送部に対して前記テーブルに載置された前記複数の容器を同時期に載置させること、
前記複数の容器を載置した前記搬送部を動かし前記複数の容器を所定の方向に払い出すこと
を有する、区分方法。
発明の詳細な説明
【技術分野】
【0001】
本発明の実施形態は、区分システム及び区分方法に関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
ソータを用いて各シュートに物品を投入する区分システムが提供されている。そのような区分システムは、物品の宛先などに応じて、シュートを通じて物品をトートなどの容器に区分する。
【先行技術文献】
【特許文献】
【0003】
特開2020-132330号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
本発明が解決しようとする課題は、1又は複数の物品を収容する容器の自動払い出し時に、処理効率を向上させる、区分システム及び区分方法を提供することである。
【課題を解決するための手段】
【0005】
実施形態によれば、区分システムは、ソート部及び容器払い出し用の搬送部を有するソータと、容器載置部と、自動移動装置とを備える。ソート部は、物品に付されたコードに基づいて物品を複数の容器のうちから選択された容器に区分する。搬送部は、ソート部で物品が区分された容器を所定の搬送方向に搬送する。容器載置部は、搬送部に対して搬送部の搬送方向に交差する方向に隣接して配置され、複数の容器が載置される。自動移動装置は、搬送部に対して容器載置部とは反対側に隣接する位置、又は、搬送部との間に容器載置部を挟むように容器載置部に近接する位置と、搬送部及び容器載置部から離間する位置との間を移動する。自動移動装置は、自動移動部と、可動部とを有する。自動移動部は、搬送部及び容器載置部に対して近接及び離間可能に移動する。
可動部は、搬送部及び容器載置部に対して近接する位置において、複数の容器のうちから選択された容器を搬送部に対して押し出し又は引き込んで選択された容器を搬送部に載せる。
【図面の簡単な説明】
【0006】
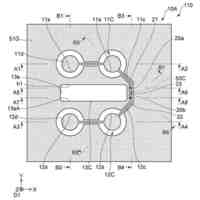
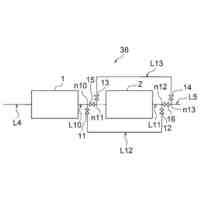
図1は、第1実施形態に係る区分システムを示す概略図である。
図2は、図1に示す区分システムを矢印IIで示す方向から見た概略図である。
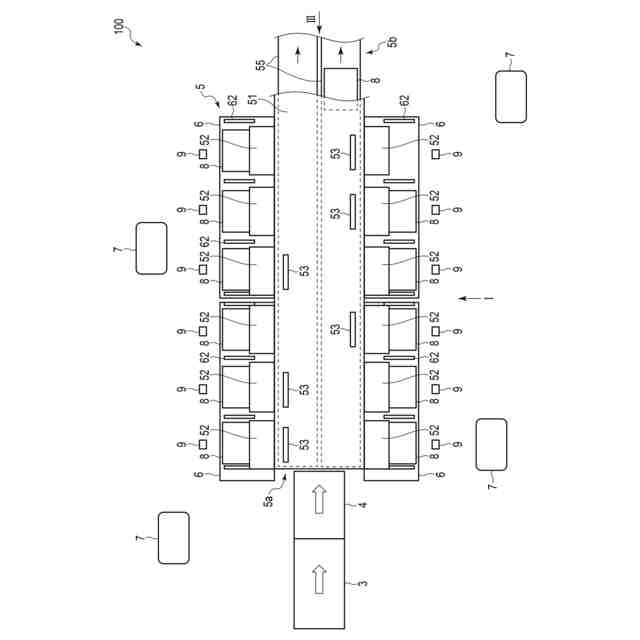
図3は、図1及び図2に示す区分システムを矢印IIIで示す方向から見た概略図である。
図4は、図1に示す区分システムの自動移動装置の可動部の一部を示す概略的な斜視図である。
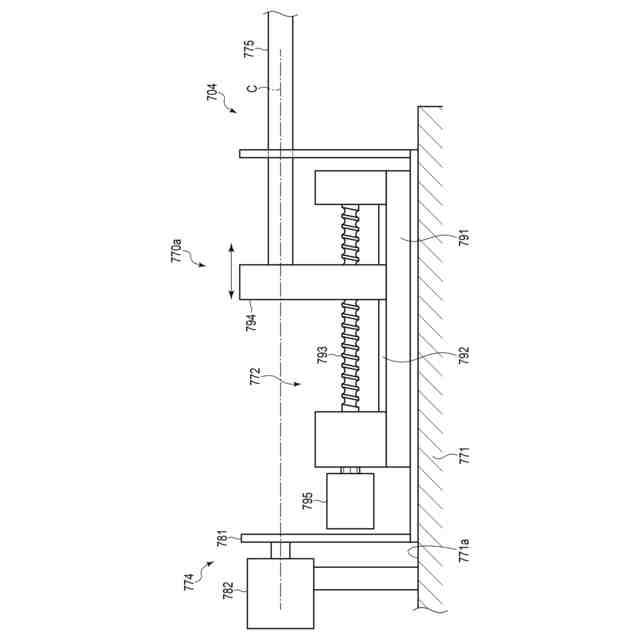
図5は、図4に示す可動部のパドルの軸方向への移動機構及びパドルの回動機構を示す概略図である。
図6は、図4に示す可動部のパドルの回動動作を示す概略図である。
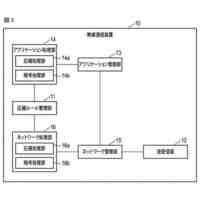
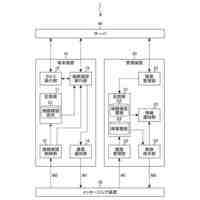
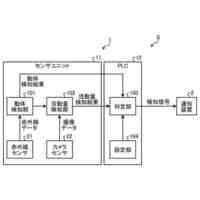
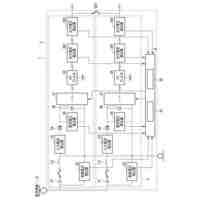
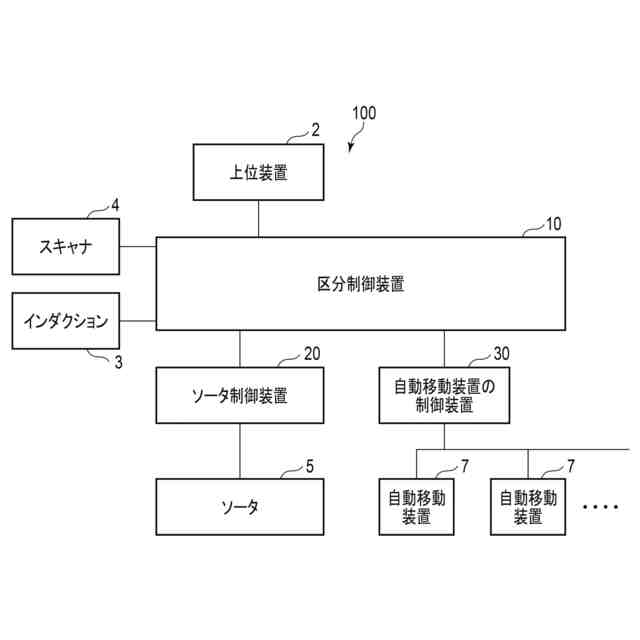
図7は、第1実施形態に係る区分システムの制御系の構成例を示すブロック図である。
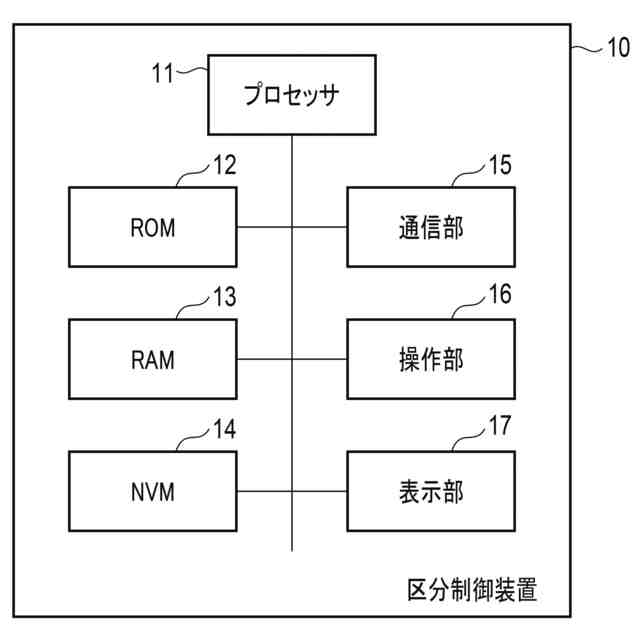
図8は、第1実施形態に係る区分制御装置の構成例を示すブロック図である。
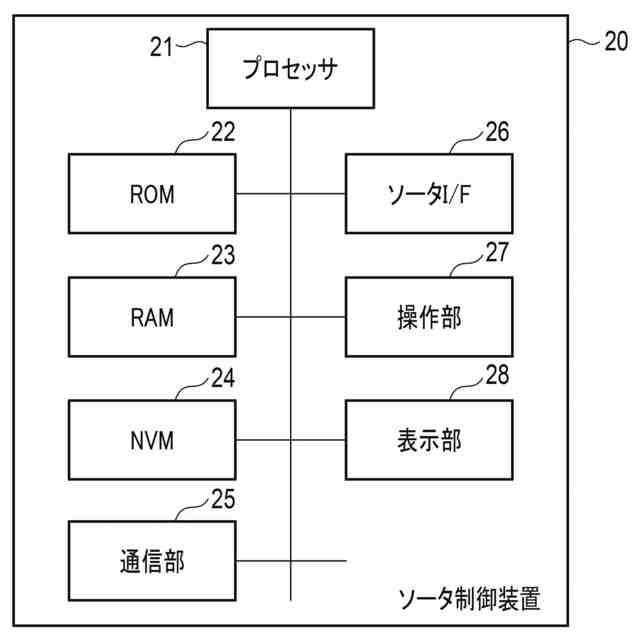
図9は、第1実施形態に係るソータ制御装置の構成例を示すブロック図である。
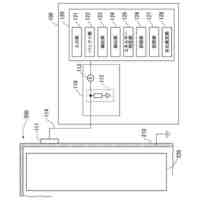
図10は、第1実施形態に係る自動移動装置の制御装置の構成例を示すブロック図である。
図11は、第1実施形態に係る自動移動装置の構成例を示すブロック図である。
図12は、第1実施形態に係る区分先情報の構成例を示す図である。
図13は、第1実施形態に係る区分システムの物品投入処理を行う場合の動作例を示すフローチャートである。
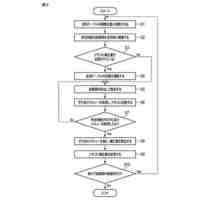
図14は、第1実施形態に係る区分システムの容器自動払出処理を行う場合の動作例を示すフローチャートである。
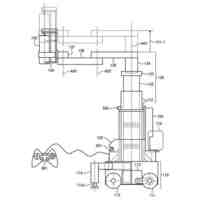
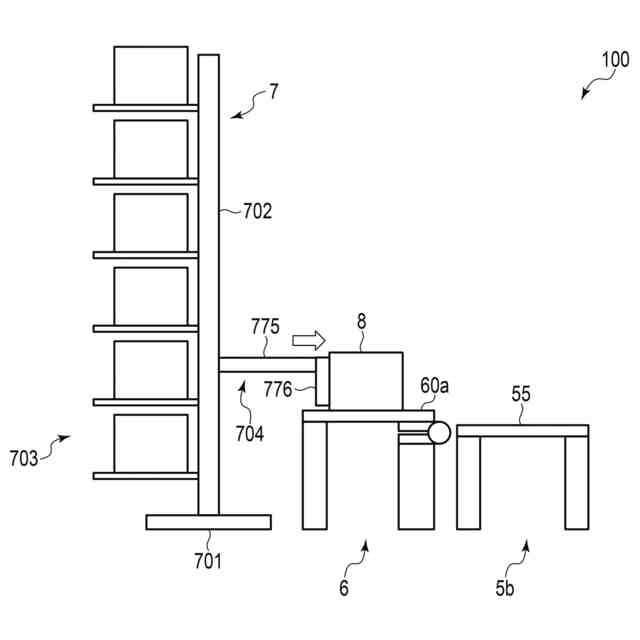
図15は、第1実施形態に係る自動移動装置の動作例を示す概略図である。
図16は、図15に続く自動移動装置の動作例を示す概略図である。
図17は、第1実施形態に係る区分システムの複数の容器の払い出し時の動作例を説明するための図である。
図18は、図17に示す複数の容器の払い出し時の動作例を説明するための図である。
図19は、第1実施形態に係る区分システムの容器自動一斉払出処理を行う場合の動作例を示すフローチャートである。
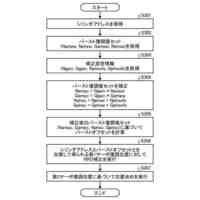
図20は、図19中の自動移動装置側の一斉払出処理を行う場合の動作例を示すフローチャートである。
図21は、第1実施形態に係る自動移動装置で容器自動一斉払出処理を行う場合の動作例を示す概略図である。
図22は、図21に自動移動装置の動作例を示す概略図である。
図23は、図22に自動移動装置の動作例を示す概略図である。
図24は、第1実施形態の変形例に係る自動移動装置の動作例を示す概略図である。
図25は、図24に続く自動移動装置の動作例を示す概略図である。
図26は、第2実施形態に係る自動移動装置の動作例を示す概略図である。
図27は、図26に続く自動移動装置の動作例を示す概略図である。
図28は、第3実施形態に係る区分システムを示す概略的な上面図である。
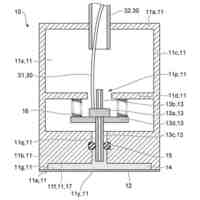
図29は、図28に示す区分システムのボンベイソータ上の物品を容器に投入する際の、ボンベイソータと容器との位置関係を示す概略的な斜視図である。
図30は、図29に示すボンベイソータの開閉体を開いた状態を示す概略的な斜視図である。
図31は、図28に示す区分システムにおいて、所定量又は所定高さとなった容器を払い出す一連の処理を説明するための概略図である。
図32は、図31に示す処理に続く処理を説明するための概略図である。
図33は、ボンベイソータに於ける異なる実施例を説明するための概略図である。
図34は、図33に示す処理に続く処理を説明するための概略図である。
図35は、ボンベイソータに於ける異なる実施例を説明するための概略図である。
図36は、図35に示す処理に続く処理を説明するための概略図である。
【発明を実施するための形態】
【0007】
以下、図面を参照していくつかの実施形態について説明する。
実施形態に係る区分システム100は、各物品を区分先であるトートやトレイなどの少なくとも上方が開口する箱状の容器8に区分する。そして、区分システム100は、満杯の容器8、例えば所定高さや所定量の物品が区分された容器8を所定の方向に搬送し、払い出す。
【0008】
(第1実施形態)
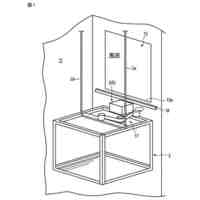
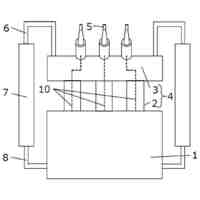
図1は、実施形態に係る区分システム100の構成例を示す。図1に示すように、区分システム100は、インダクション3、スキャナ4、ソータ5、容器載置部6、複数の自動移動装置7、複数の容器8などを備える。
【0009】
ここで、区分システム100は、インダクション3、スキャナ4、及び、ソータ5の順に物品を運搬する。
【0010】
インダクション3は、オペレータ又はロボットなどによって投入される物品を受領する。インダクション3は、コンベアなどを用いて、投入された物品を搬送してスキャナ4に投入した後、ソータ5に物品を投入する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社東芝
弁
8日前
株式会社東芝
台車
1か月前
株式会社東芝
固定子
1か月前
株式会社東芝
センサ
1か月前
株式会社東芝
センサ
27日前
株式会社東芝
開閉装置
1か月前
株式会社東芝
光スイッチ
27日前
株式会社東芝
遠心送風機
22日前
株式会社東芝
電力変換装置
7日前
株式会社東芝
電力変換装置
1か月前
株式会社東芝
蓋の開閉装置
29日前
株式会社東芝
対策提示装置
20日前
株式会社東芝
潤滑油供給装置
1か月前
株式会社東芝
電気車制御装置
1か月前
株式会社東芝
電子計算機装置
20日前
株式会社東芝
紙葉類処理装置
21日前
株式会社東芝
有価物回収方法
1か月前
株式会社東芝
画像取得システム
1か月前
株式会社東芝
投込式水位伝送器
8日前
株式会社東芝
磁気ディスク装置
27日前
株式会社東芝
系統安定化システム
1か月前
株式会社東芝
無線通信装置及び方法
27日前
株式会社東芝
電子回路及び計算装置
1か月前
株式会社東芝
接続確認制御システム
6日前
株式会社東芝
締結装置および制御方法
22日前
株式会社東芝
監視装置および監視方法
1か月前
株式会社東芝
エンジニアリングツール
1か月前
株式会社東芝
ウエーハ及び半導体装置
1か月前
株式会社東芝
ケーブル脱落防止バンド
20日前
株式会社東芝
建築用構造材の据付装置
1か月前
株式会社東芝
静止誘導電器の接続構造
27日前
株式会社東芝
蓄熱システム及び蓄熱方法
1か月前
株式会社東芝
人感装置及び人感システム
1か月前
株式会社東芝
熱交換器およびその製造方法
20日前
株式会社東芝
半導体装置及びその製造方法
1か月前
株式会社東芝
制御装置および電源システム
1か月前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ