TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024111399
公報種別
公開特許公報(A)
公開日
2024-08-19
出願番号
2023015863
出願日
2023-02-06
発明の名称
自律移動ロボット
出願人
株式会社オカムラ
代理人
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240809BHJP(制御;調整)
要約
【課題】高い作業効率を維持してそれぞれ自律走行させることができる自律移動ロボットを提供する。
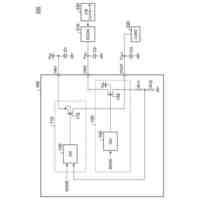
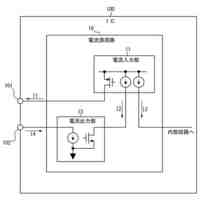
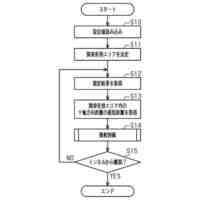
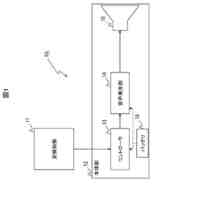
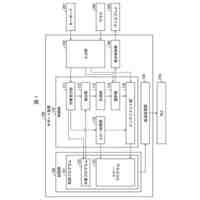
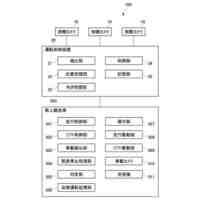
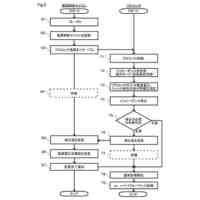
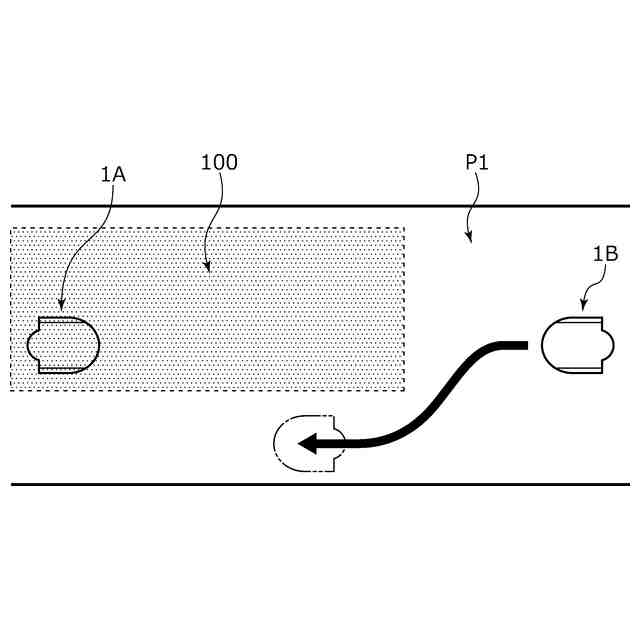
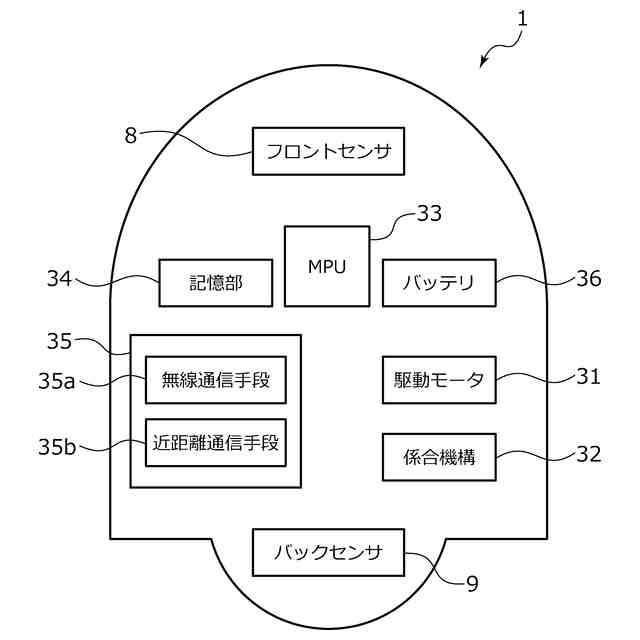
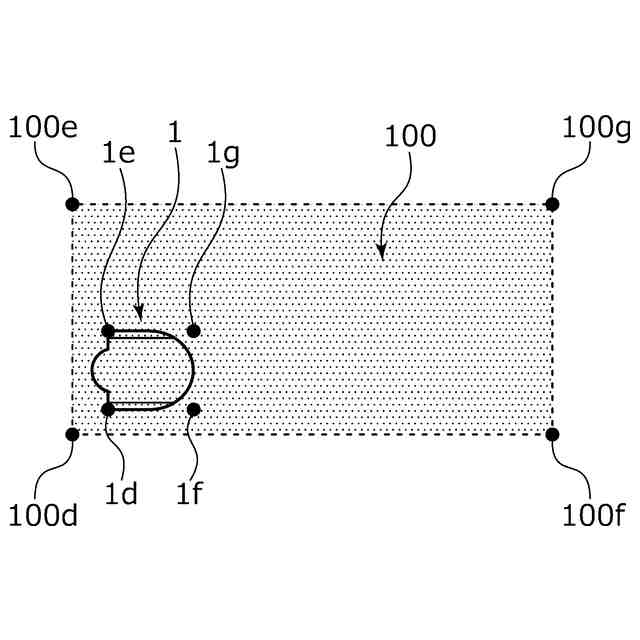
【解決手段】自身の位置情報を取得する取得手段33と、取得した自身の位置情報を他の自律移動ロボットに対して送信可能である通信手段35aと、受信した他の自律移動ロボット1の位置情報に基づき、他の自律移動ロボット1が収まる所定の領域を示す領域情報100を生成可能である生成手段と、を備え、生成した領域情報100を迂回する迂回動作を行う。
【選択図】図7
特許請求の範囲
【請求項1】
自身の位置情報を取得する取得手段と、
取得した前記自身の位置情報を他の自律移動ロボットに対して送信可能である通信手段と、
受信した他の自律移動ロボットの位置情報に基づき、当該他の自律移動ロボットが収まる所定の領域を示す領域情報を生成可能である生成手段と、
を備え、
生成した前記領域情報を迂回する迂回動作を行うことを特徴とする自律移動ロボット。
続きを表示(約 1,000 文字)
【請求項2】
前記自律移動ロボットは、前記通信手段を用いて自身の前記走行経路情報を他の自律移動ロボットに対して送信可能であり、
前記生成手段は、他の自律移動ロボットの前記位置情報と受信した前記走行経路情報とに基づき前記領域情報を生成可能であることを特徴とする請求項1に記載の自律移動ロボット。
【請求項3】
前記領域情報は、進行方向左右のいずれか一方に偏って張り出す形状であることを特徴とする請求項2に記載の自律移動ロボット。
【請求項4】
前記自律移動ロボットは、平時において、左右幅が設定された通路を走行するようになっており、迂回動作時には前記通路の左右幅内において前記領域情報を避けた左右一方側に迂回することを特徴とする請求項3に記載の自律移動ロボット。
【請求項5】
前記自律移動ロボットは、カゴ台車を牽引する搬送車であり、前記領域情報は、前記カゴ台車が収まる所定の領域を示すものであり、
前記カゴ台車を牽引する搬送車の領域情報は、前記カゴ台車を牽引していない搬送車の領域情報よりも広いことを特徴とする請求項1に記載の自律移動ロボット。
【請求項6】
前記自律移動ロボットは、前記カゴ台車の牽引の有無を判定する判定手段を備え、前記カゴ台車の牽引の有無に基づき、前記カゴ台車を牽引する搬送車の領域情報と前記カゴ台車を牽引していない搬送車の領域情報との間で切り替えを行うことを特徴とする請求項5に記載の自律移動ロボット。
【請求項7】
前記自律移動ロボットの前記通信手段は、セルラー回線を用いて他の自律移動ロボットと通信を行うことを特徴とする請求項1ないし6のいずれかに記載の自律移動ロボット。
【請求項8】
自身の位置情報を取得する取得手段と、
取得した前記自身の位置情報に基づき自身が収まる所定の領域を示す領域情報を生成する生成手段と、
前記領域情報を他の自律移動ロボットに対して送信可能である通信手段と、を備え、
少なくとも衝突の虞のある他の自律移動ロボットに対して前記領域情報を適時送信することを特徴とする自律移動ロボット。
【請求項9】
前記生成手段は、当該自身の自律移動ロボットの前記位置情報と自身の走行経路情報とに基づき前記領域情報を生成可能であることを特徴とする請求項8に記載の自律移動ロボット。
発明の詳細な説明
【技術分野】
【0001】
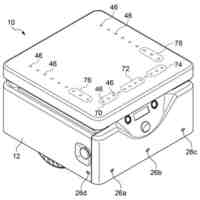
本発明は、施設内を自律走行可能な自律移動ロボットに関する。
続きを表示(約 1,900 文字)
【0002】
近年、業務効率や生産性の向上のために、工場や物流倉庫等の施設において行われる様々な作業について自動化が進んでいる。例えば、従来、工場や物流倉庫等においては、部品や製品等の物品が積載される棚と、作業者が扱うカゴ台車との間で物品の棚出しと棚入れが行われているが、インターネットショッピングの普及により特に物流倉庫においては、小口で棚出しと棚入れ作業が行われ、カゴ台車の移動量が爆発的に増加しており、作業者の負担の軽減を図るために、カゴ台車を移動させることができる自律走行可能な自律移動ロボットが開発されている。
【0003】
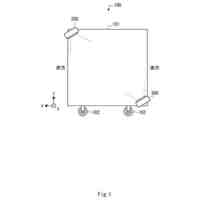
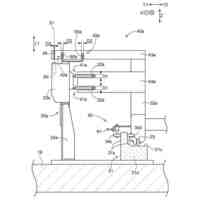
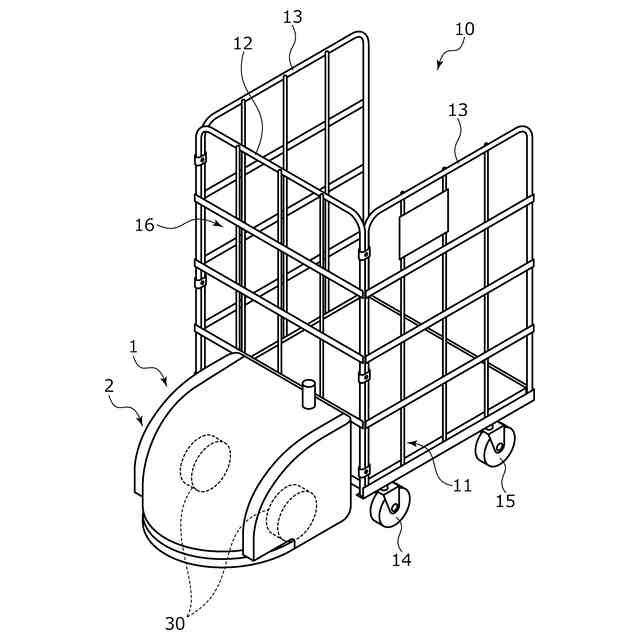
例えば、特許文献1に示される台車を移動させる自律走行可能な自律移動ロボットは、台車の前端部に係合可能な牽引アームを備え、自律移動ロボットの牽引アームを台車に係合させることで、自律移動ロボットの走行により台車を牽引して移動させることが可能となっており、物品搬送作業の人的負担を大幅に軽減することができる。
【0004】
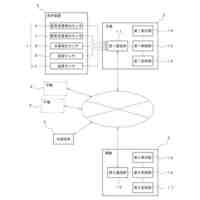
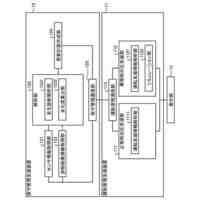
また、このような自律移動ロボットにあっては、それぞれが自律走行するため、全ての自律移動ロボットと通信可能な管理装置を設置し、この管理装置により自律移動ロボットの走行経路情報の決定や自律移動ロボット同士の衝突防止が行われる。詳しくは、物流倉庫等の施設内にアクセスポイントが設置され、それぞれの自律移動ロボットに設置された無線通信手段がアクセスポイントを介して管理装置と通信し、集約された情報に基づき管理装置によりそれぞれの自律移動ロボットの動作が制御されている(例えば特許文献2)。
【先行技術文献】
【特許文献】
【0005】
特許5977157号公報(第8頁、第1,2図)
特開2022-45454号公報(第7頁、第1図)
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献2のように、倉庫内の全ての自律移動ロボットが管理装置と通信を行うものにあっては、管理装置が全ての自律移動ロボットの位置情報を把握し統合的に衝突を防止した移動制御を行う必要があるため、衝突を回避するために複雑な演算が行われ、衝突回避の動作の開始までに時間が掛かる場合があり、演算が完了するまで自律移動ロボットを停止したり、減速したりする動作が行われ、自律移動ロボットを高い作業効率を維持して自律走行させることができない虞があった。
【0007】
本発明は、このような問題点に着目してなされたもので、高い作業効率を維持してそれぞれ自律走行させることができる自律移動ロボットを提供することを目的とする。
【課題を解決するための手段】
【0008】
前記課題を解決するために、本発明の自律移動ロボットは、
自身の位置情報を取得する取得手段と、
取得した前記自身の位置情報を他の自律移動ロボットに対して送信可能である通信手段と、
受信した他の自律移動ロボットの位置情報に基づき、当該他の自律移動ロボットが収まる所定の領域を示す領域情報を生成可能である生成手段と、
を備え、
生成した前記領域情報を迂回する迂回動作を行うことを特徴としている。
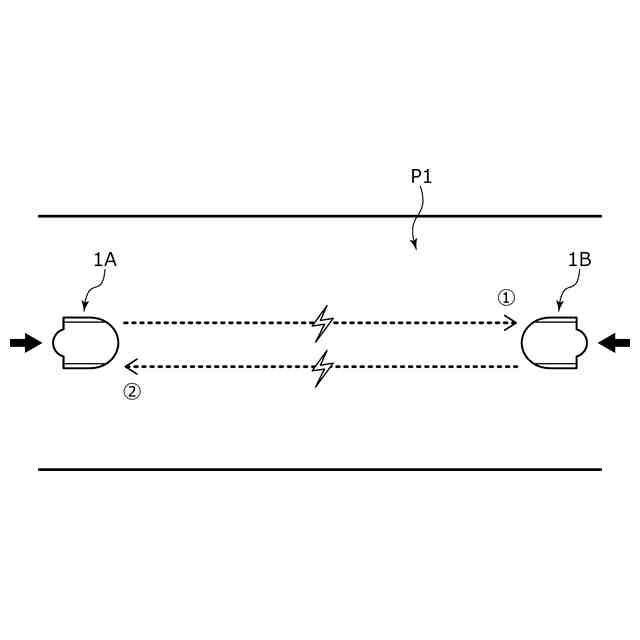
この特徴によれば、他の自律移動ロボットが収まる領域情報を迂回する迂回動作を行うというシンプルな衝突回避のプログラムで、自律移動ロボット同士の衝突を回避することができるため、高い作業効率を維持してそれぞれの自律移動ロボットを自律走行させることができる。
【0009】
前記自律移動ロボットは、前記通信手段を用いて自身の前記走行経路情報を他の自律移動ロボットに対して送信可能であり、
前記生成手段は、他の自律移動ロボットの前記位置情報と受信した前記走行経路情報とに基づき前記領域情報を生成可能であることを特徴としている。
この特徴によれば、領域情報が他の自律移動ロボットから送信された位置情報に加えて走行経路情報を考慮して生成されることで、より確実に自律移動ロボット同士の衝突を防ぐことができる。
【0010】
前記領域情報は、進行方向左右のいずれか一方に偏って張り出す形状であることを特徴としている。
この特徴によれば、自律移動ロボット同士がすれ違う際には、常に自律移動ロボット同士が互いに離間する方向に移動して迂回することにため、シンプルなプログラムで正面衝突を確実に防止できる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社FUJI
工作機械
16日前
エイブリック株式会社
定電圧回路
2か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
トヨタ自動車株式会社
移動システム
2か月前
日昌電気制御株式会社
管理システム
1か月前
井関農機株式会社
自立走行農作業車
2か月前
トヨタ自動車株式会社
制御システム
1か月前
株式会社ユタカ
半自動切換装置
1か月前
トヨタ自動車株式会社
設備の制御方法
2か月前
トヨタ自動車株式会社
マーカースタンド
1か月前
井関農機株式会社
作業車両の作業管理システム
2か月前
株式会社ダイフク
搬送設備
15日前
横河電機株式会社
電流源回路
2か月前
株式会社豊田自動織機
自律走行車両
1か月前
マキノジェイ株式会社
工作機械
3か月前
株式会社フカデン
外周部加工システム
4日前
住友重機械工業株式会社
自律走行台車
2か月前
大阪瓦斯株式会社
二次圧制御機構
11日前
個人
ペダル操作検知装置
2か月前
日立建機株式会社
自律走行システム
8日前
三菱電機株式会社
管理システムおよび管理方法
2か月前
大阪瓦斯株式会社
二次圧制御機構
11日前
株式会社デンソー
移動体制御装置
1日前
ミツミ電機株式会社
半導体集積回路装置
1か月前
アズビル株式会社
パラメータ探索装置および方法
2か月前
横河電機株式会社
電圧電流変換回路
1か月前
株式会社ダイフク
搬送設備の検査装置
11日前
オムロン株式会社
サポート装置およびサポート方法
3か月前
エンゼルグループ株式会社
無人搬送システム
1か月前
株式会社デンソー
車両用電子制御装置
1か月前
ニチコン株式会社
電源装置
1か月前
トヨタ自動車株式会社
充電装置
2か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
1か月前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ