TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024103555
公報種別
公開特許公報(A)
公開日
2024-08-01
出願番号
2024084888,2022003330
出願日
2024-05-24,2022-01-12
発明の名称
設備状態監視システム
出願人
株式会社デンソー
代理人
弁理士法人ゆうあい特許事務所
主分類
G05B
23/02 20060101AFI20240725BHJP(制御;調整)
要約
【課題】それぞれの設備に振動センサなどを備えなくても監視対象となる複数の設備の異常を検出可能にする。
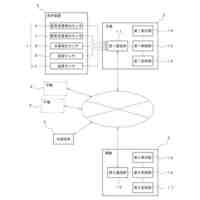
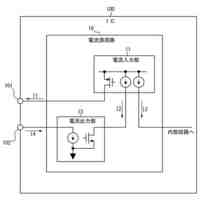
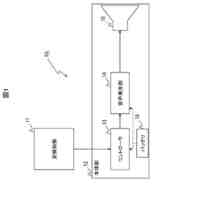
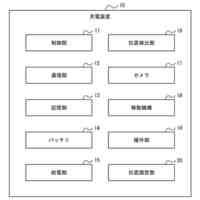
【解決手段】状態監視に用いる設備2の状態を示すデータをセンサデータとして出力するセンサ11と、センサデータの送信を行う通信部13、および、センサと通信部への電源供給を行う電源部12を有し、複数の設備に共通のセンサノード10を備える。また、通信部から送信されたセンサデータを受信する受信機20と、受信機で受信されたセンサデータを入力し、複数の設備が正常に動作している正常時のセンサデータに基づいて、複数の設備の正常時の状態を学習データとして学習すると共に、学習後にセンサノードから送信されたセンサデータが受信機で受信されると、センサデータが示す複数の設備の状態と学習データとを比較して、複数の設備の異常の発生もしくは異常の予兆を検出する状態検出部30と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
設備状態監視システムであって、
監視対象となる設備(2)の状態を示すデータをセンサデータとして出力するセンサ(11)と、前記センサデータの送信を行う通信部(13)、および、前記センサと前記通信部への電源供給を行う電源部(12)を有し、複数の前記監視対象に共通に適用されるセンサノード(10)と、
前記通信部から送信された前記センサデータを受信する受信機(20)と、
前記受信機で受信された前記センサデータを入力し、前記複数の監視対象が正常に動作している正常時の前記センサデータに基づいて、前記複数の監視対象の正常時の状態を学習データとして学習すると共に、学習後に前記センサノードから送信された前記センサデータが前記受信機で受信されると、該センサデータが示す前記複数の監視対象の状態と前記学習データとを比較して、前記複数の監視対象の異常の発生もしくは異常の予兆を検出する状態検出部(30)と、を含み、
前記電源部から前記センサおよび前記通信部への給電方式は、磁界を用いる方式、エナジーハーベストおよびモバイルバッテリー給電のいずれかであって、
前記センサノードは、移動体に配置され、該移動体と共に移動させられることで、前記複数の監視対象の状態を示す前記センサデータを取得する、設備状態監視システム。
続きを表示(約 1,400 文字)
【請求項2】
前記センサは、前記センサノードの周辺環境の変化を検出する、請求項1に記載の設備状態監視システム。
【請求項3】
前記移動体は、搬送路(5)であり、
前記センサは、前記搬送路の姿勢の変化を検出する、請求項1に記載の設備状態監視システム。
【請求項4】
前記移動体はワークおよび前記センサノードの少なくとも一方を挟持するチャック設備であり、
前記センサは、前記チャック設備の動作を検出する、請求項1に記載の設備状態監視システム。
【請求項5】
前記移動体は、搬送路(5)であり、
前記センサは、振動センサおよび音センサを含み、
前記状態検出部は、前記振動センサで取得したデータおよび前記音センサで取得したデータのうち、前記振動センサで取得したデータを含むデータによって異常検出した場合は前記搬送路由来の異常と判定し、前記音センサで取得したデータのみによって異常検出した場合は前記搬送路由来とは異なる要因の異常と判定する、請求項1に記載の設備状態監視システム。
【請求項6】
前記移動体は、搬送路(5)であり、
前記通信部は、前記搬送路の搬送速度に対応させて前記センサデータを加工して前記受信機に送信する、請求項1に記載の設備状態監視システム。
【請求項7】
前記通信部は、前記センサデータに対してダウンサンプリング加工を可能であって、前記搬送速度が遅いほど前記ダウンサンプリング加工のサンプリング周波数を小さくする、請求項6に記載の設備状態監視システム。
【請求項8】
前記移動体は、搬送路(5)であり、
前記状態検出部は、前記センサで取得したデータに基づいて前記複数の監視対象の異常の発生個所を特定する、請求項1に記載の設備状態監視システム。
【請求項9】
前記移動体は、複数の区間に分割された搬送路(5)であり、
前記状態検出部は、前記搬送路の正常時の前記センサデータに基づいて前記搬送路の位置を特定する、請求項1に記載の設備状態監視システム。
【請求項10】
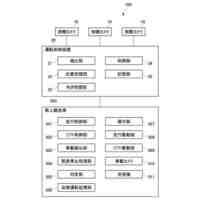
前記状態検出部は、
前記監視対象が正常に動作している際の前記センサデータに基づいて、前記複数の監視対象それぞれにおける構成要素(2b)ごとの前記センサデータに含まれる特徴的な部分および時系列データの少なくとも一方を学習データとして学習する学習部(31c)と、
前記学習データのモデルを記憶するモデル記憶部(31d)と、
前記学習後に前記センサノードから送信された前記センサデータが前記受信機で受信されると、該センサデータが示す特徴的な部分および時系列データの少なくとも一方の前記学習データからの外れ具合を定量化した異常度合を算出する推論結果出力部(31e)と、
前記異常度合を予め設定した閾値と比較することで、前記複数の監視対象の異常の発生もしくは異常の予兆を検出し、その検出結果を出力する信号出力部(32)と、を含み、
前記信号出力部が出力する前記状態検出部での前記検出結果として前記監視対象の異常の発生もしくは異常の予兆を表示する表示装置(40)を有し、
前記表示装置は、異常発生箇所および異常予兆箇所を3Dマッピング表示で表示する、請求項1に記載の設備状態監視システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、設備の異常を監視する設備状態監視システムに関するものである。
続きを表示(約 3,200 文字)
【背景技術】
【0002】
従来、稼働している装置の異常を検出する装置の検査装置が知られている。例えば、特許文献1では、振動センサ、相関図生成部、深層学習部および判定部を備え、回転装置の状態を判定する装置の検査装置が提案されている。稼働している回転装置が有するベアリングの振動状態を複数の振動センサで検出すると、相関図生成部にて、複数の振動センサが出力する複数の加速度信号の相関を示す相関図を生成する。そして、深層学習部にて、相関図生成部が生成する相関図に基づく深層学習を行ったのち、判定部にて、深層学習の結果に基づいて回転部の状態を判定する判ことで、構成が異なる種々の装置の異常を検出可能としている。
【先行技術文献】
【特許文献】
【0003】
特開2018-091640号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
しかしながら、従来の検査装置では、生産ラインのような、稼働している装置が多数存在する環境で、多数の稼働している装置の異常を検出可能にするには多数の振動センサが必要になる。また、異常箇所や異常原因などの異常の詳細を検出するためには、設備の異常が複合的な要因により発生していることを踏まえると、複数種類のセンシングが必要であるため、センサ数が莫大となり、リアルタイムの監視が困難である。
【0005】
本発明は上記点に鑑みて、複数の監視対象の異常をそれぞれの監視対象に振動センサなどを備えなくても検出可能とする設備状態監視システムを提供することを目的とする。
【課題を解決するための手段】
【0006】
上記目的を達成するため、請求項1に記載の発明は、設備状態監視システムであって、監視対象となる設備(2)の状態を示すデータをセンサデータとして出力するセンサ(11)と、センサデータの送信を行う通信部(13)、および、センサと通信部への電源供給を行う電源部(12)を有し、複数の監視対象に共通に適用されるセンサノード(10)と、通信部から送信されたセンサデータを受信する受信機(20)と、受信機で受信されたセンサデータを入力し、複数の監視対象が正常に動作している正常時のセンサデータに基づいて、複数の監視対象の正常時の状態を学習データとして学習すると共に、学習後にセンサノードから送信されたセンサデータが受信機で受信されると、該センサデータが示す複数の監視対象の状態と学習データとを比較して、複数の監視対象の異常の発生もしくは異常の予兆を検出する状態検出部(30)と、を含み、電源部からセンサおよび通信部への給電方式は、磁界を用いる方式、エナジーハーベストおよびモバイルバッテリー給電のいずれかであって、センサノードは、移動体に配置され、該移動体と共に移動させられることで、複数の監視対象の状態を示すセンサデータを取得する。
【0007】
このように、複数の監視対象について、少なくとも1つの共通のセンサノードを用いて複数の監視対象が正常に動作している正常時のセンサデータを状態検出部に伝え、正常時の学習データとして学習させている。このため、学習後にセンサノードから送信されたセンサデータが示す複数の監視対象の状態を学習データと比較することで、複数の監視対象の異常をそれぞれの監視対象に振動センサなどを備えなくても検出することが可能となる。
【0008】
なお、各構成要素等に付された括弧付きの参照符号は、その構成要素等と後述する実施形態に記載の具体的な構成要素等との対応関係の一例を示すものである。
【図面の簡単な説明】
【0009】
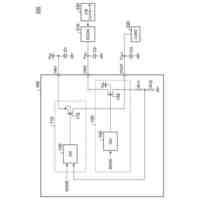
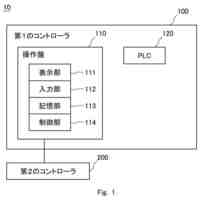
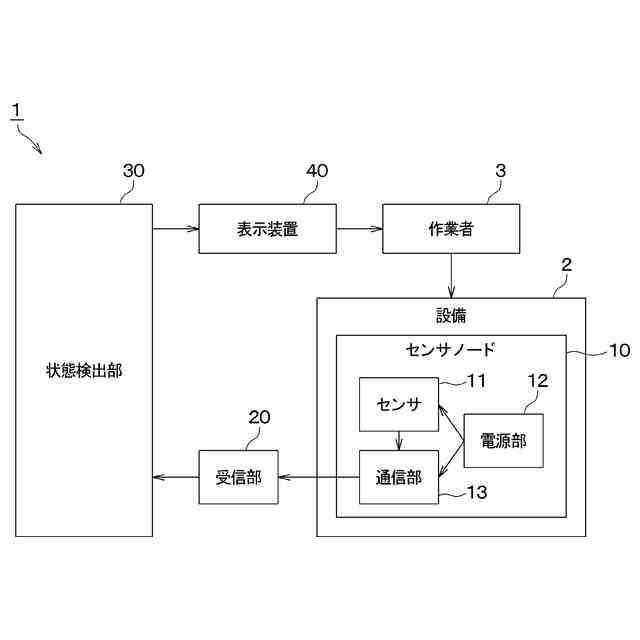
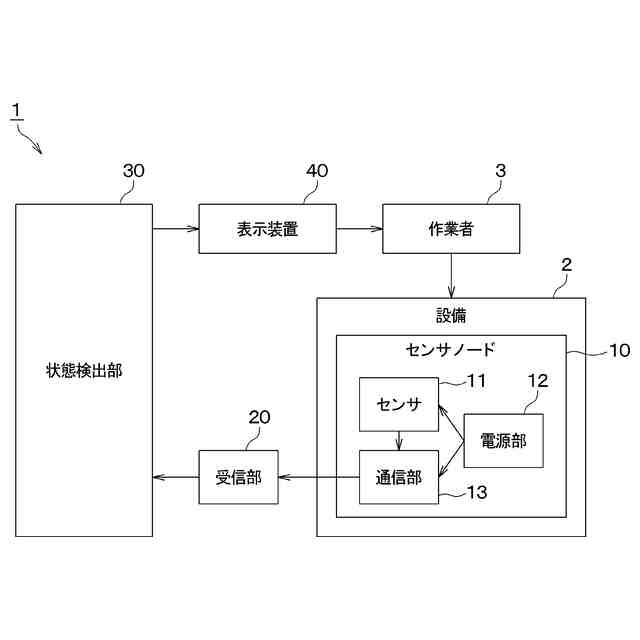
第1実施形態にかかる設備状態監視システムのブロック図である。
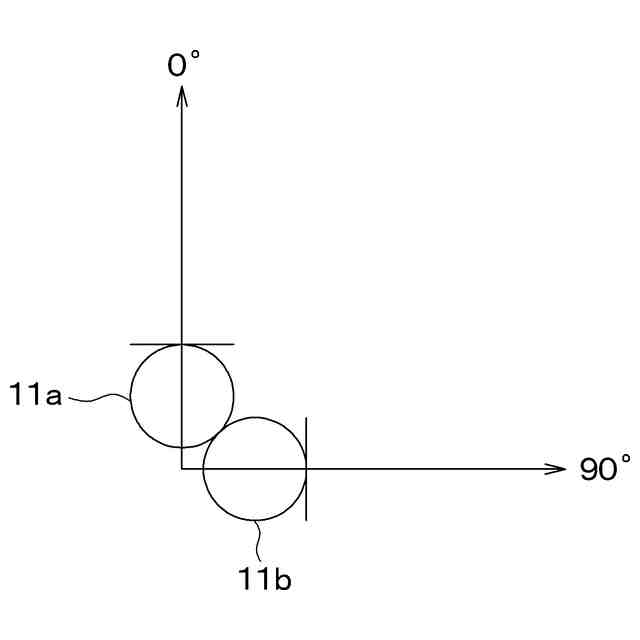
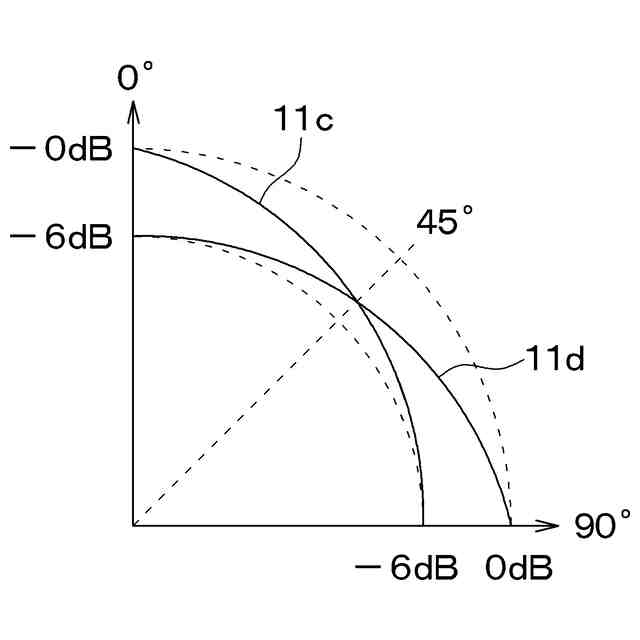
2つのマイクをそれぞれの指向性が90°ずれるように配置した様子を示した模式図である。
2つのマイクを図2Aの配置とした場合のポーラーパターンを示した図である。
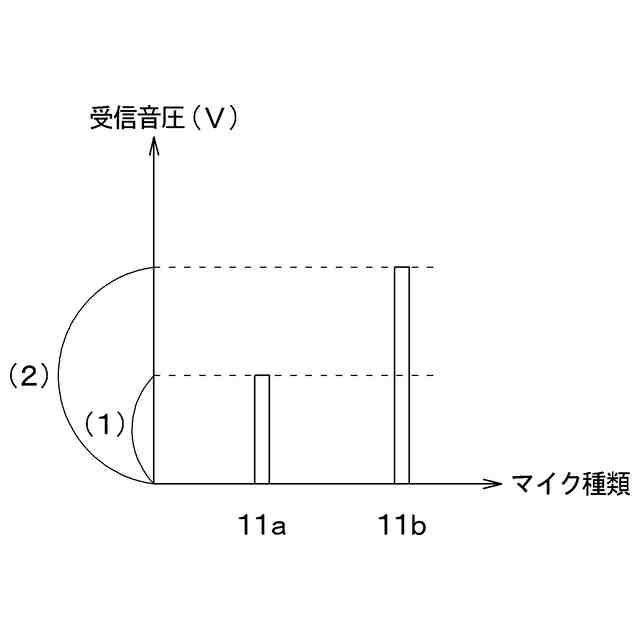
2つのマイクを図2Aの配置とした場合に音源をx軸とy軸の中間に配置した様子を示した図である。
図3Aに示した音源から音を出力したときの各マイクでの受信音圧を示した図である。
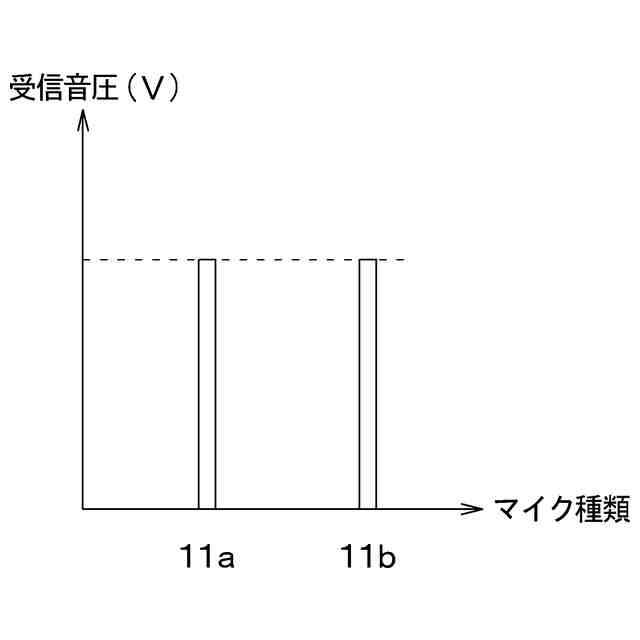
2つのマイクを図2Aの配置とした場合に音源をx軸上に配置した様子を示した図である。
図4Aに示した音源から音を出力したときの各マイクでの受信音圧を示した図である。
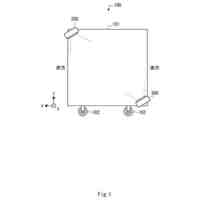
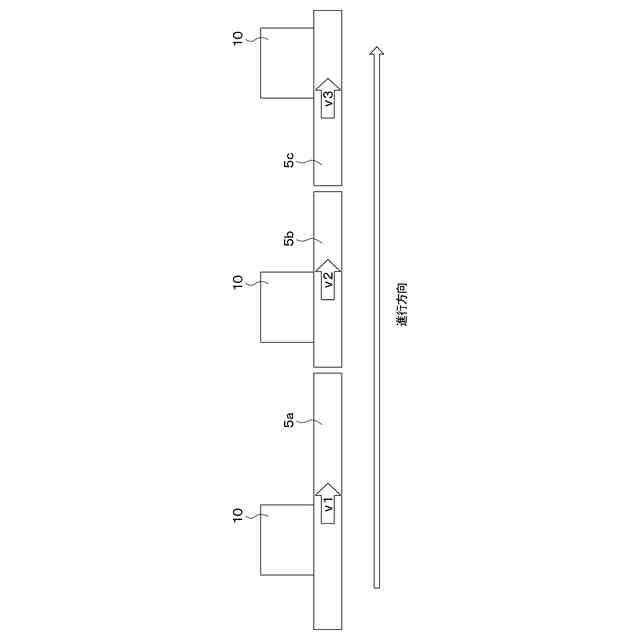
センサノードが3つの搬送路上を流れるように配置される場合を示す図である。
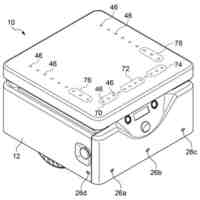
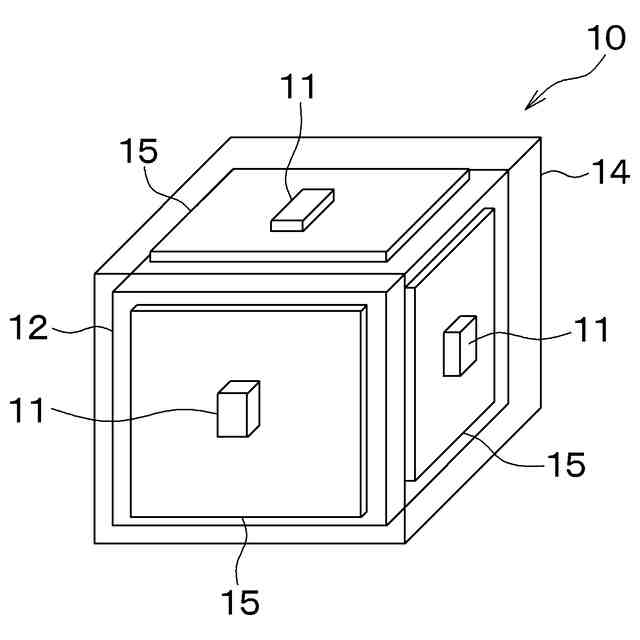
センサノードの透過斜視図である。
センサノードの分解図である。
センサノードの重心が鉛直方向の中央より上方側にある場合を示す図である。
センサノードが振動抑制構造を有する一例を示す図である。
振動抑制構造が貫通穴であることを示す図である。
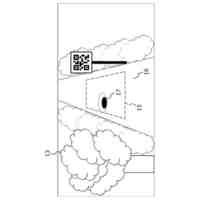
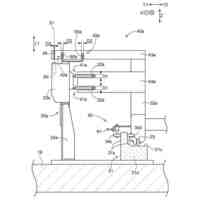
搬送路上に直接配置されるワークがセンサノードに置き換えられて配置される一例を示す図である。
パレット上に配置されるワークがセンサノードに置き換えられて配置される一例を示す図である。
治具上に配置されるワークがセンサノードに置き換えられて配置される一例を示す図である。
ワークにセンサノードが直接取り付けられる配置の一例を示す図である。
ワークにセンサノードが直接取り付けられる配置の一例を示す図である。
パレットにセンサノードが直接取り付けられる配置の一例を示す図である。
センサノードがワークにおける鉛直方向の中央より上方側に配置される一例を示す図である。
センサノードがワークにおける進行方向の後方側に配置される一例を示す図である。
設備状態監視システムがサーバを備える構成を示す図である。
設備状態監視システムがトレーサビリティシステムとして機能する際の履歴情報の一例を示す図である。
搬送路上に複数のセンサノードを配置したときの様子を示した図である。
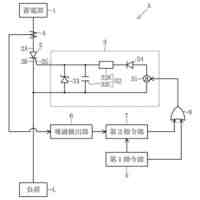
複合センサの他の構成例を示した図である。
複合センサの他の構成例を示した図である。
複合センサに備えられる1つのセンサの構成例を示した図である。
図10Aの構成のセンサにより複合センサを構成した場合の透過斜視図である。
センサノードが搬送路上に設置された場合の様子を示した図である。
センサノードで音圧を測定したときの周波数特性を示した図である。
複数の区間に分割されている搬送路の位置を特定する方法を説明するための図である。
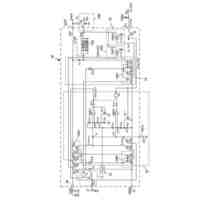
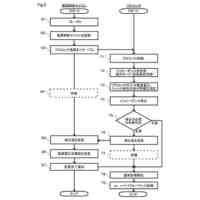
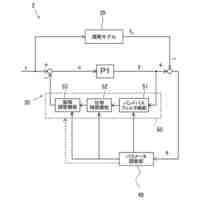
状態検出部の機能ブロックなどの詳細を示した図である。
搬送路に沿って各設備が配置されている様子を示した図である。
図29に示す搬送路上をセンサノードが移動する際に、各位置での異常度合を示した図である。
表示装置での検出結果の表示例を示した図である。
複数の搬送路の異常発生を検出する方法を説明するための図である。
表示装置が表示する搬送路の異常発生の検出結果の一例を示す図である。
状態検出部での検出結果に基づいて部品メーカに発注を掛ける様子を模式的に描いたブロック図である。
エネルギー使用量と生産量との関係の一例を示したグラフである。
【発明を実施するための形態】
【0010】
以下、本発明の実施形態について図に基づいて説明する。なお、以下の各実施形態相互において、互いに同一もしくは均等である部分には、同一符号を付して説明を行う。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
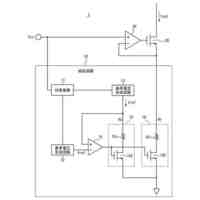
定電圧回路
2か月前
井関農機株式会社
作業車両
2か月前
株式会社FUJI
工作機械
13日前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
井関農機株式会社
自立走行農作業車
2か月前
トヨタ自動車株式会社
制御システム
27日前
トヨタ自動車株式会社
移動システム
2か月前
日昌電気制御株式会社
管理システム
1か月前
株式会社ユタカ
半自動切換装置
1か月前
トヨタ自動車株式会社
設備の制御方法
2か月前
井関農機株式会社
作業車両の作業管理システム
2か月前
トヨタ自動車株式会社
マーカースタンド
1か月前
株式会社ダイフク
搬送設備
12日前
横河電機株式会社
電流源回路
2か月前
株式会社豊田自動織機
自律走行車両
1か月前
住友重機械工業株式会社
自律走行台車
2か月前
株式会社フカデン
外周部加工システム
1日前
大阪瓦斯株式会社
二次圧制御機構
8日前
ミツミ電機株式会社
半導体集積回路装置
28日前
日立建機株式会社
自律走行システム
5日前
大阪瓦斯株式会社
二次圧制御機構
8日前
三菱電機株式会社
管理システムおよび管理方法
2か月前
個人
ペダル操作検知装置
2か月前
横河電機株式会社
電圧電流変換回路
1か月前
アズビル株式会社
パラメータ探索装置および方法
2か月前
エンゼルグループ株式会社
無人搬送システム
1か月前
トヨタ自動車株式会社
充電装置
2か月前
株式会社ダイフク
搬送設備の検査装置
8日前
株式会社デンソー
車両用電子制御装置
1か月前
ニチコン株式会社
電源装置
1か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
1か月前
シンフォニアテクノロジー株式会社
共振抑制制御装置
1か月前
株式会社FUJI
工作機械
1か月前
オークマ株式会社
制御装置
12日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ