TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024103509
公報種別
公開特許公報(A)
公開日
2024-08-01
出願番号
2024076967,2023091532
出願日
2024-05-10,2018-07-11
発明の名称
トラクタ
出願人
株式会社クボタ
代理人
安田岡本弁理士法人
主分類
A01B
69/00 20060101AFI20240725BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】自動操舵において簡単に位置の補正を行うことができるようにする。
【解決手段】トラクタは、車体と、前記車体の手動操舵を行うために手動で操作されるステアリングハンドルと、前記車体に設けられ且つ測位衛星からの信号に基づいて前記車体の位置を検出する測位装置と、走行予定ラインを設定するために操作可能な操作部材と、前記操作部材の操作により設定された前記走行予定ライン及び前記測位装置で検出された前記車体の位置である演算車体位置に基づいて、前記ステアリングハンドルによる手動操舵とは別に前記車体の自動操舵を実行する自動操舵機構と、前記自動操舵での前記車体の移動中に、前記ステアリングハンドルとは別に、前記車体の操舵を行うために操作可能な補正スイッチと、前記補正スイッチの操作単位当たりの補正量を変更する画面を表示する表示装置と、を備えている。
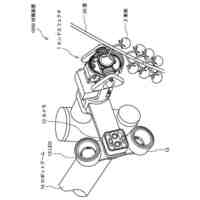
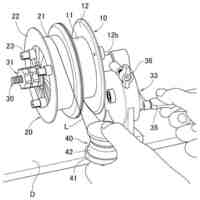
【選択図】図1
特許請求の範囲
【請求項1】
車体と、
前記車体の手動操舵を行うために手動で操作されるステアリングハンドルと、
前記車体に設けられ且つ測位衛星からの信号に基づいて前記車体の位置を検出する測位装置と、
走行予定ラインを設定するために操作可能な操作部材と、
前記操作部材の操作により設定された前記走行予定ライン及び前記測位装置で検出された前記車体の位置である演算車体位置に基づいて、前記ステアリングハンドルによる手動操舵とは別に前記車体の自動操舵を実行する自動操舵機構と、
前記自動操舵での前記車体の移動中に、前記ステアリングハンドルとは別に、前記車体の操舵を行うために操作可能な補正スイッチと、
前記補正スイッチの操作単位当たりの補正量を変更する画面を表示する表示装置と、
を備えているトラクタ。
続きを表示(約 490 文字)
【請求項2】
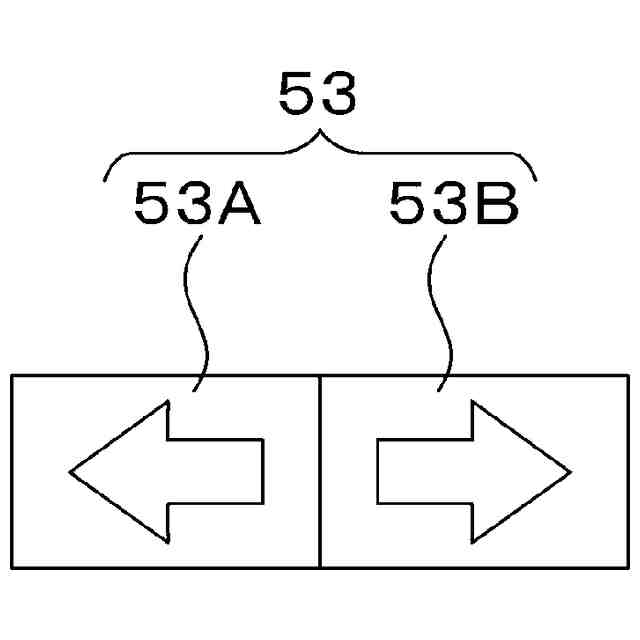
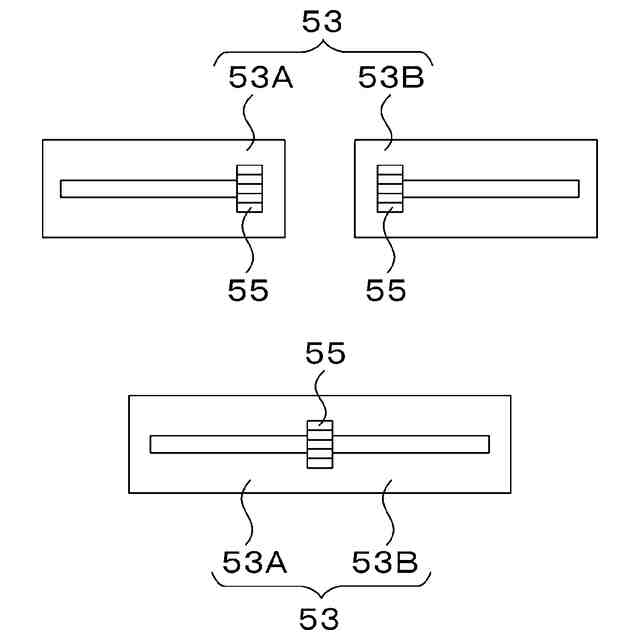
前記補正スイッチは、前記車体を一方向へ操舵する第1補正部と、前記車体を他方向へ操舵する第2補正部とを含み、
前記表示装置は、前記第1補正部と前記第2補正部とで同じ値であり共通に変更される前記操作単位当たりの前記補正量を表示する請求項1に記載のトラクタ。
【請求項3】
前記表示装置は、前記走行予定ラインを設定するための走行基準ラインの始点を示すシンボルマークと、前記走行基準ラインの終点を示すシンボルマークとを前記画面に表示する請求項1又は2に記載のトラクタ。
【請求項4】
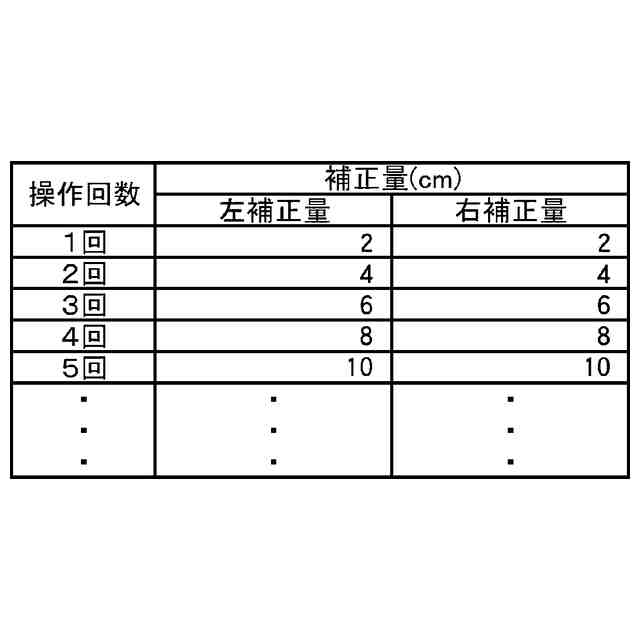
前記補正量は、前記補正スイッチの操作の回数に応じた量に設定されるものであり、
前記補正スイッチの前記操作単位は、操作回数である請求項1に記載のトラクタ。
【請求項5】
前記補正スイッチは、前記車体を一方向へ操舵するために押圧操作可能な第1補正部と、前記車体を他方向へ操舵するために押圧操作可能な第2補正部とを含み、
前記操作回数は、前記第1補正部又は前記第2補正部を押圧操作した回数である請求項4に記載のトラクタ。
発明の詳細な説明
【技術分野】
【0001】
本発明は、例えば、トラクタに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
従来、農作業機として特許文献1が知られている。特許文献1の農作業機は、手動操舵による手動走行と、基準走行ラインに平行に設定される設定走行ラインに沿って自動操舵により走行する自動走行とを切替自在な走行機体と、手動走行と自動走行とを切替自在な切替スイッチとを備えている。また、農作業機は、畝に沿って走行中に右指示ボタンを押した後、基準走行ラインの始点が設定され、走行中に左指示ボタンを押すことによって基準走行ラインの終点が設定される。即ち、自動操舵前に基準走行ラインの設定を行っている。
【先行技術文献】
【特許文献】
【0003】
特開2017-123803号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の農作業機では、切替スイッチによって手動走行から自動走行に切り換えることにより、簡単に自動走行を行うことができる。しかしながら、特許文献1の自動走行においては、測位装置の測位の精度が低下した場合等に農作業機の位置の補正を行うことができないのが実情である。
そこで、本発明は上記問題点に鑑み、自動操舵において簡単に位置の補正を行うことができるトラクタを提供することを目的とする。
【課題を解決するための手段】
【0005】
この技術的課題を解決するための本発明の技術的手段は、以下に示す点を特徴とする。
トラクタは、車体と、前記車体の手動操舵を行うために手動で操作されるステアリングハンドルと、前記車体に設けられ且つ測位衛星からの信号に基づいて前記車体の位置を検出する測位装置と、走行予定ラインを設定するために操作可能な操作部材と、前記操作部材の操作により設定された前記走行予定ライン及び前記測位装置で検出された前記車体の位置である演算車体位置に基づいて、前記ステアリングハンドルによる手動操舵とは別に前記車体の自動操舵を実行する自動操舵機構と、前記自動操舵での前記車体の移動中に、前記ステアリングハンドルとは別に、前記車体の操舵を行うために操作可能な補正スイッチと、前記補正スイッチの操作単位当たりの補正量を変更する画面を表示する表示装置と、を備えている。
【0006】
前記補正スイッチは、前記車体を一方向へ操舵する第1補正部と、前記車体を他方向へ操舵する第2補正部とを含み、前記表示装置は、前記第1補正部と前記第2補正部とで同じ値であり共通に変更される前記操作単位当たりの前記補正量を表示する。
【0007】
前記表示装置は、前記走行予定ラインを設定するための走行基準ラインの始点を示すシンボルマークと、前記走行基準ラインの終点を示すシンボルマークとを前記画面に表示する。
【0008】
前記補正量は、前記補正スイッチの操作の回数に応じた量に設定されるものであり、前記補正スイッチの前記操作単位は、操作回数である。
【0009】
前記補正スイッチは、前記車体を一方向へ操舵するために押圧操作可能な第1補正部と、前記車体を他方向へ操舵するために押圧操作可能な第2補正部とを含み、前記操作回数は、前記第1補正部又は前記第2補正部を押圧操作した回数である。
【発明の効果】
【0010】
本発明によれば、自動操舵において簡単に位置の補正を行うことができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釣り用ルアー
11日前
個人
ハーブの育種法
12日前
東レ株式会社
海苔網
13日前
個人
水耕栽培装置
4日前
井関農機株式会社
作業機
15日前
個人
ルアーホルダ
18日前
株式会社シマノ
釣竿
4日前
個人
手押し式草刈り機
18日前
井関農機株式会社
コンバイン
7日前
井関農機株式会社
コンバイン
7日前
個人
回転式草刈刃
7日前
株式会社ジェンク
除草システム
19日前
株式会社たねまき
収穫装置
12日前
株式会社シマノ
釣竿
4日前
松山株式会社
農作業機
15日前
松山株式会社
農作業機
4日前
東邦化学工業株式会社
除菌剤組成物
18日前
松山株式会社
農作業機
22日前
個人
直蒔き水稲栽培法とその補助機器
4日前
個人
水活用による果樹の結実安定化法
4日前
株式会社山田鉄工
海苔網処理船
4日前
ユシロ化学工業株式会社
組成物
11日前
株式会社ナカショウ
園芸用防虫ネット
21日前
株式会社山田鉄工
海苔網処理方法
4日前
井関農機株式会社
収穫作業機
11日前
セッツ株式会社
殺菌剤組成物
12日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
グローブライド株式会社
釣用仕掛け
15日前
個人
太陽光パネル付植物栽培システム
7日前
第一精工株式会社
逆巻替え装置
12日前
株式会社ランテクノ
植物育成システム
11日前
株式会社大阪製薬
物品用消毒剤
11日前
住友化学株式会社
液状農薬組成物
22日前
株式会社リッチェル
ペット用玩具
18日前
西山商事有限会社
蓮根の栽培方法
7日前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ