TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024103315
公報種別
公開特許公報(A)
公開日
2024-08-01
出願番号
2023007583
出願日
2023-01-20
発明の名称
葉避け装置
出願人
国立大学法人山形大学
代理人
個人
,
個人
主分類
A01D
46/30 20060101AFI20240725BHJP(農業;林業;畜産;狩猟;捕獲;漁業)
要約
【課題】収穫ロボットによる果実の収穫の際に、事前に葉を避けることができる葉避け装置を提供する。
【解決手段】
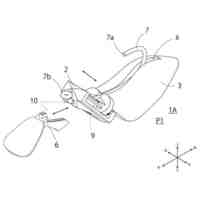
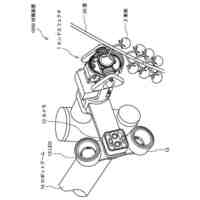
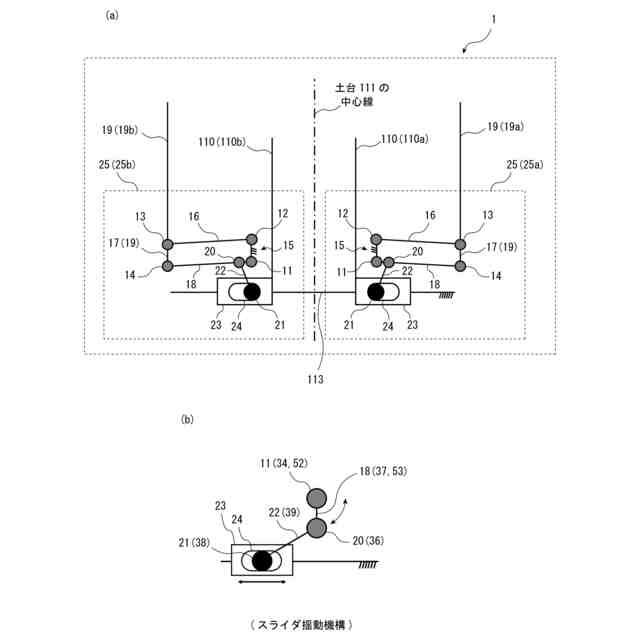
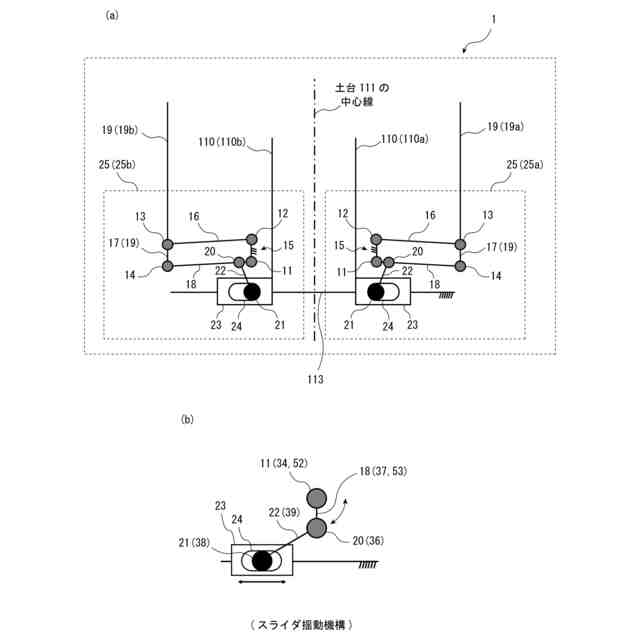
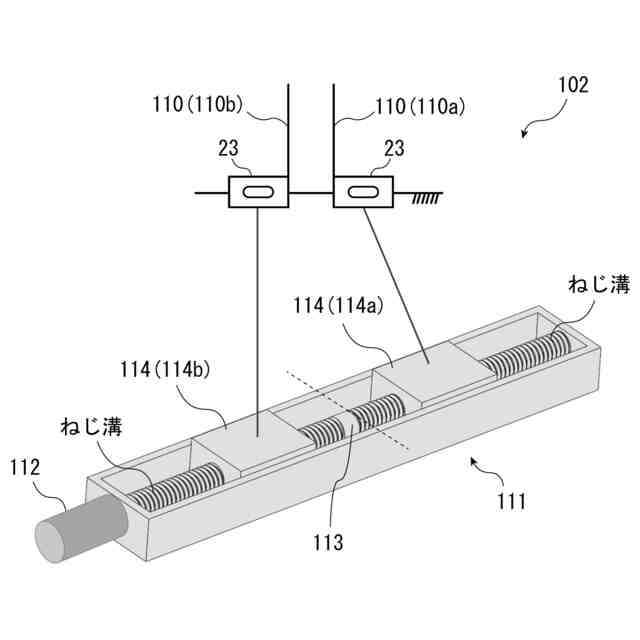
本発明にかかる葉避け装置は、ロボットアームの先端に設けられた平行2指ハンドを有する収穫ロボット用の葉避け装置であって、平行2指ハンドの前方にある葉を避ける葉避け部19と、平行2指ハンドを構成する2本の指部110の開閉動作を利用して、当該平行2指ハンドの前方にある葉を避けるための動作を能動的に行う能動葉避け機構部25と、を備える。そして、能動葉避け機構部25は、葉避けを行う場合は葉避け部19を展開し、葉避けを行わないときは葉避け部19を格納する。
【選択図】図2
特許請求の範囲
【請求項1】
ロボットアームの先端に設けられた収穫装置を有する収穫ロボット用の葉避け装置であって、
前記収穫装置の前方にある葉を避ける葉避け部と、
前記収穫装置の動作を利用して、当該収穫装置の前方にある葉を避けるための動作を能動的に行う能動葉避け機構部と、
を備え、
前記能動葉避け機構部は、葉避けを行うときは前記葉避け部を展開し、葉避けを行わないときは前記葉避け部を格納する、
ことを特徴とする葉避け装置。
続きを表示(約 1,500 文字)
【請求項2】
前記収穫装置を平行2指ハンドとし、
前記能動葉避け機構部は、前記平行2指ハンドを構成する2本の指部の開閉動作を利用して、当該平行2指ハンドの前方にある葉を避けるための動作を能動的に行う、
ことを特徴とする請求項1に記載の葉避け装置。
【請求項3】
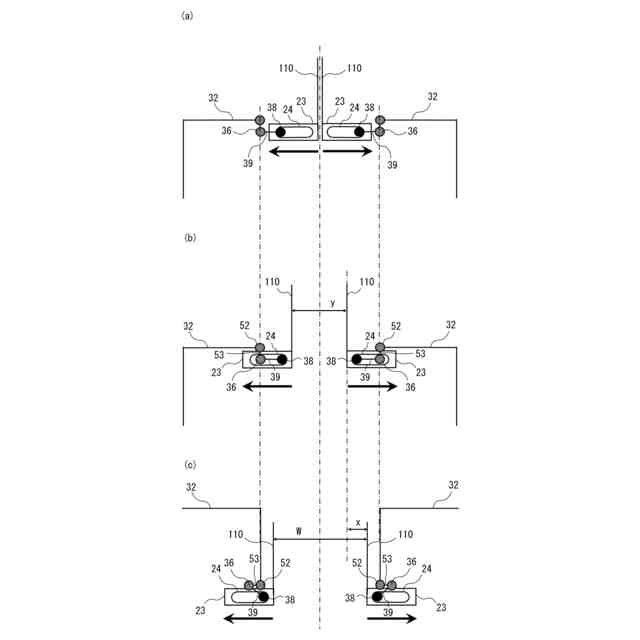
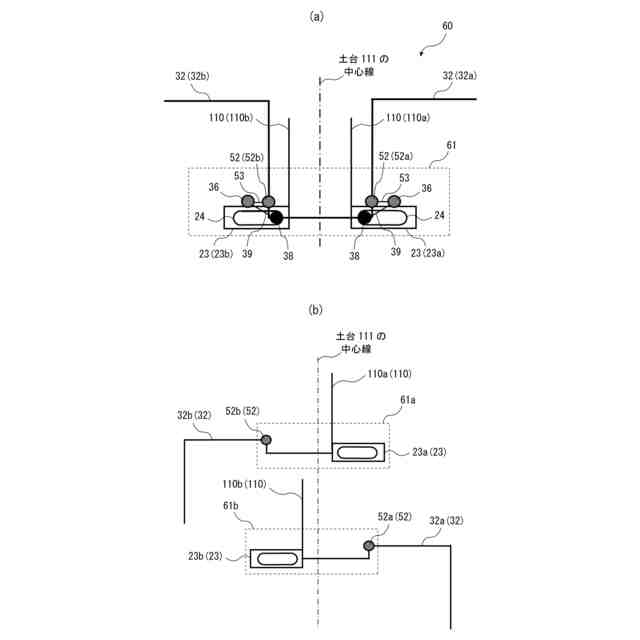
前記能動葉避け機構部は、前記指部の開閉動作に連動して直進動作と回転動作とを行う直進対偶、および当該直進対偶の動きに応じて揺動する動節、を含むスライダ揺動機構を備え、当該スライダ揺動機構の動きに基づいて前記葉避け部を動作させ、
前記直進対偶は、前記指部の開閉動作に連動する直進動作において、前記葉避け部の動作に影響を与えないスライド範囲を有する、
ことを特徴とする請求項2に記載の葉避け装置。
【請求項4】
前記能動葉避け機構部は、前記平行2指ハンドに設けられた土台に形成された固定リンクとして機能する静止節と、前記スライダ揺動機構を構成する前記動節として機能する駆動節と、を有する平行4リンク機構をさらに備え、
前記葉避け部を、前記静止節に対向する前記平行4リンク機構の中間節と一体に形成する、
ことを特徴とする請求項3に記載の葉避け装置。
【請求項5】
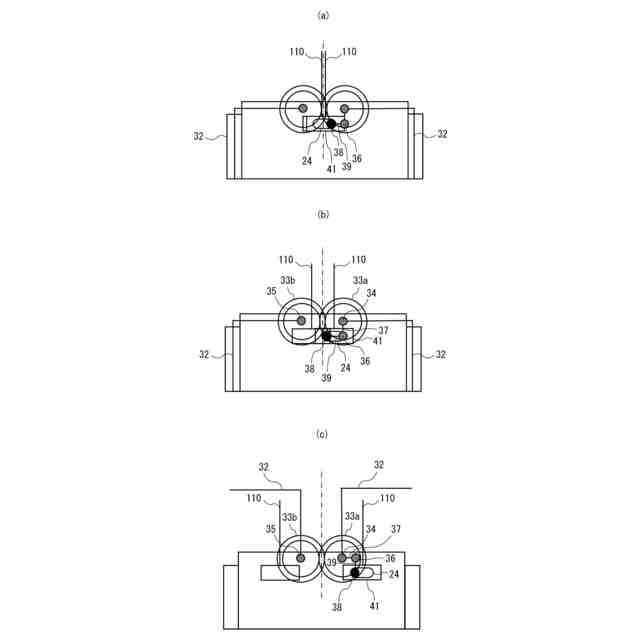
前記能動葉避け機構部は、
噛み合った状態の2つの歯車である第1の歯車および第2の歯車と、
前記スライダ揺動機構を構成する前記動節の動きに連動して軸回転するとともに前記第1の歯車の回転軸として機能する第1の回転対偶と、
前記第2の歯車の回転軸として機能する第2の回転対偶と、
を有し、
前記第1の歯車を用いて前記スライダ揺動機構を構成する前記動節の動きを前記第2の歯車に伝達する構造とし、
前記葉避け部は、前記第1の歯車に接続された第1の葉避け部と、前記第2の歯車に接続された第2の葉避け部と、を有する、
ことを特徴とする請求項3に記載の葉避け装置。
【請求項6】
前記能動葉避け機構部は、前記スライダ揺動機構を構成する前記動節の動きに連動して軸回転する回転対偶を有し、当該回転対偶の軸回転により前記葉避け部を動作させる、
ことを特徴とする請求項3に記載の葉避け装置。
【請求項7】
ロボットアームの先端に設けられたハンド部を有する収穫ロボット用の葉避け装置であって、
前記ハンド部の前方にある葉を避けるための葉避け部と、
前記ハンド部に設けられた取付用の土台部と、
一端部を前記土台部に取り付け、他端部を前記ハンド部の先端を超えるまで延伸し、当該他端部で前記葉避け部を支持する葉避け支え部と、
を備える、
ことを特徴とする葉避け装置。
【請求項8】
前記葉避け部および前記葉避け支え部を弾性体で形成する、
ことを特徴とする請求項7に記載の葉避け装置。
【請求項9】
ロボットアームの先端に設けられたハンド部を有する収穫ロボット用の葉避け装置であって、
前記ハンド部の前方にある葉を避けるための葉避け部と、
前記ハンド部に設けられた取付用の土台部と、
一端部を前記土台部に取り付け、他端部を前記ハンド部の先端を超えるまで延伸し、当該他端部で前記葉避け部を支持する葉避け支え部と、
前記土台部に取り付けられた前記葉避け支え部を進退可能に案内するガイド部と、
を備える、
ことを特徴とする葉避け装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、果実を収穫するための収穫ロボット(収穫機)用の葉避け装置に関する。
続きを表示(約 1,200 文字)
【背景技術】
【0002】
現在、高齢化によって農家の人手が不足している。そこで、果物や野菜等を自動収穫する様々な農業用ロボットが研究、開発されている。そして、これらのロボットには、労働力不足の解消だけでなく、作業者の負担の軽減も求められている。
【0003】
たとえば、下記特許文献1には、画像処理により果実の位置を検出し、ハンドを移動させて摘採する収穫ロボットにおいて、イチゴ、ミカン、トマト、キュウリやナス等の果実を収穫するための収穫用ハンドが開示されている。
【0004】
具体的には、下記特許文献1に記載の収穫用ハンドは、収穫する果実の茎を茎保持チャックにより茎保持部に挟み込み、茎を保持した状態で第1刃により茎保持チャックの上方位置において茎を切断し、その後、第2刃を茎に沿って果実の近くまで下降させ、茎を果実の近くで正確に切断して収穫する。
【0005】
また、下記特許文献2には、ロボットアーム機構を備えた収穫ロボットにおいて、カメラの撮影画像によって収穫対象のミニトマトの位置を特定し、ロボットアーム機構を移動させてミニトマトを収穫する果実収穫装置が開示されている。
【0006】
具体的には、下記特許文献2に記載の果実収穫装置は、ロボットアーム機構によりミニトマトの位置まで移動し、吸引機による吸引動作によりミニトマトを吸引し、この状態で、ミニトマトの果柄に引っ掛けたワイヤループを引き寄せることによりカッターに押し付けて果柄を切断し、果柄が切断された後、吸引機による吸引動作を停止し、ミニトマトを収穫籠にリリースする。
【先行技術文献】
【特許文献】
【0007】
特開2022-67417号公報
特開2021-171020号公報
【発明の概要】
【発明が解決しようとする課題】
【0008】
上記特許文献1,2に記載の収穫ロボットは、いずれも果実を収穫する際に、カメラによる撮影画像によって果実の有無を把握し、アームを果実の近くに移動させて収穫するものである。
【0009】
しかしながら、上記のような収穫ロボットは、葉に隠れた果実を見つけることが困難である。特に、さくらんぼは、葉が多く、撮影画像では果実の有無を把握できないため、収穫ロボットによる収穫では収穫率が大幅に低減する。すなわち、上記特許文献1,2に記載の収穫ロボットは、葉を避ける手段がないため、葉に隠れた果実の自動収穫には適していない。
【0010】
本発明は、上記のような課題に鑑みてなされたものであって、収穫ロボットが果実を収穫する際に、事前に葉を避けることができる葉避け装置を提供することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
釣り用ルアー
11日前
個人
ハーブの育種法
12日前
東レ株式会社
海苔網
13日前
個人
ルアーホルダ
18日前
個人
水耕栽培装置
4日前
井関農機株式会社
作業機
15日前
株式会社シマノ
釣竿
4日前
井関農機株式会社
コンバイン
7日前
井関農機株式会社
コンバイン
7日前
個人
手押し式草刈り機
18日前
株式会社ジェンク
除草システム
19日前
個人
回転式草刈刃
7日前
株式会社たねまき
収穫装置
12日前
株式会社シマノ
釣竿
4日前
松山株式会社
農作業機
15日前
松山株式会社
農作業機
4日前
東邦化学工業株式会社
除菌剤組成物
18日前
株式会社ナカショウ
園芸用防虫ネット
21日前
株式会社山田鉄工
海苔網処理船
4日前
個人
水活用による果樹の結実安定化法
4日前
個人
直蒔き水稲栽培法とその補助機器
4日前
ユシロ化学工業株式会社
組成物
11日前
株式会社山田鉄工
海苔網処理方法
4日前
グローブライド株式会社
釣用仕掛け
15日前
セッツ株式会社
殺菌剤組成物
12日前
株式会社クボタ
作業車
11日前
株式会社クボタ
作業車
11日前
井関農機株式会社
収穫作業機
11日前
株式会社ランテクノ
植物育成システム
11日前
株式会社大阪製薬
物品用消毒剤
11日前
個人
太陽光パネル付植物栽培システム
7日前
第一精工株式会社
逆巻替え装置
12日前
株式会社アテックス
コンバインの排稈カッター
4日前
本田技研工業株式会社
芝刈機
22日前
西山商事有限会社
蓮根の栽培方法
7日前
株式会社リッチェル
ペット用玩具
18日前
続きを見る
他の特許を見る




 特許ウォッチ
特許ウォッチ