TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024101264
公報種別
公開特許公報(A)
公開日
2024-07-29
出願番号
2023005148
出願日
2023-01-17
発明の名称
制御装置及び制御方法
出願人
株式会社ダイヘン
,
国立大学法人宇都宮大学
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
G05D
1/43 20240101AFI20240722BHJP(制御;調整)
要約
【課題】全方向移動車輪のいずれかが故障した場合であっても、移動体を退避させることができる制御装置を提供する。
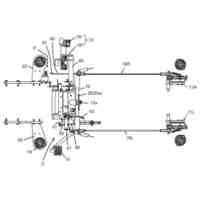
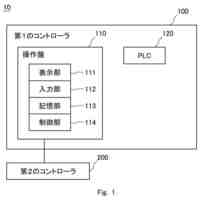
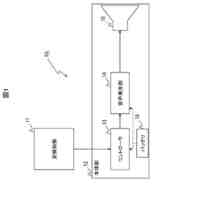
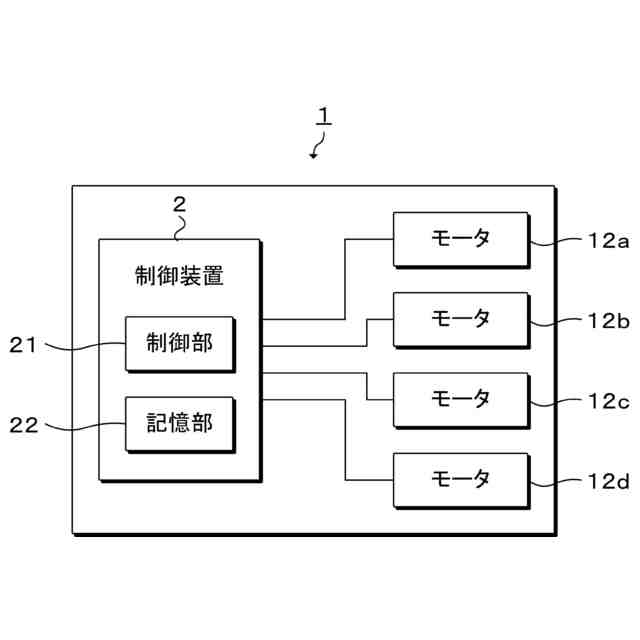
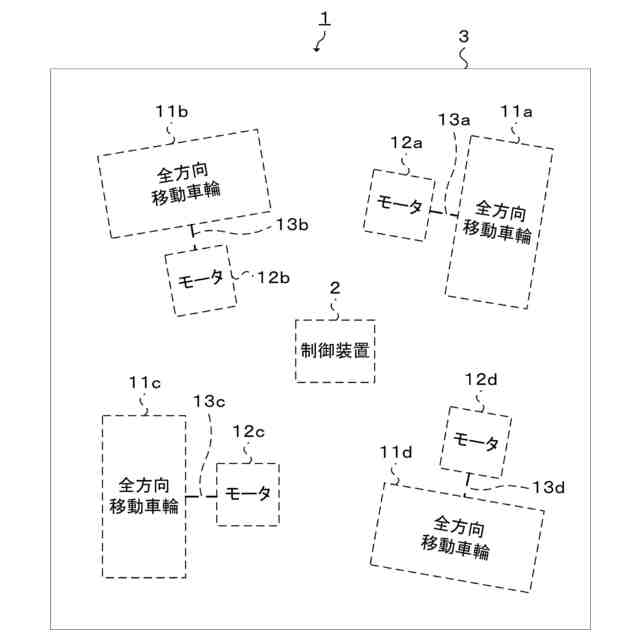
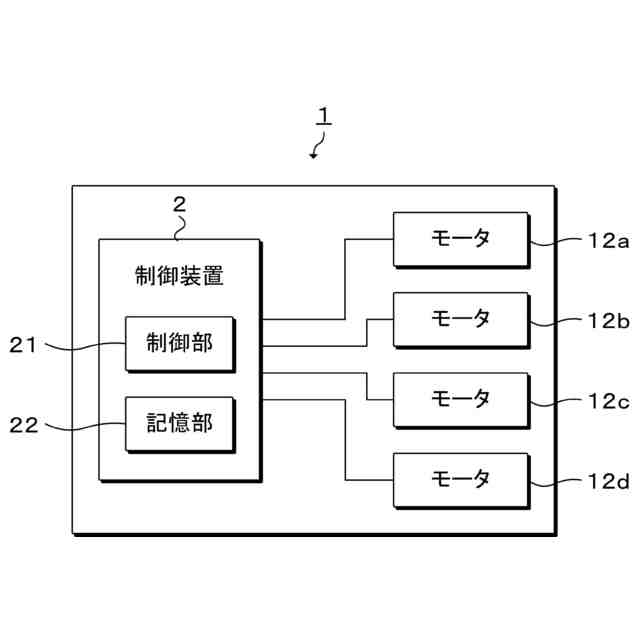
【解決手段】制御装置2は、移動体1に配置された3個以上の全方向移動車輪を制御する制御装置であって、全方向移動車輪を制御して移動体1を移動させる制御部21を備え、制御部21は、全方向移動車輪のいずれかが故障した場合に、全方向移動車輪に対する制御方法を、全方向移動車輪の各々を制御して移動体を移動させる第1制御方法から、正常に動作する残りの全方向移動車輪の各々を制御して移動体1を移動させる第2制御方法に切り替える。
【選択図】図2
特許請求の範囲
【請求項1】
移動体に配置された3個以上の全方向移動車輪を制御する制御装置であって、
前記全方向移動車輪を制御して前記移動体を移動させる制御部を備え、
前記制御部は、前記全方向移動車輪のいずれかが故障した場合に、前記全方向移動車輪に対する制御方法を、前記全方向移動車輪の各々を制御して前記移動体を移動させる第1制御方法から、正常に動作する残りの全方向移動車輪の各々を制御して前記移動体を移動させる第2制御方法に切り替える、
制御装置。
続きを表示(約 790 文字)
【請求項2】
前記制御部は、前記第1制御方法から前記第2制御方法に切り替えた場合に、前記移動体を退避させる方向に前記移動体の向きを回転させてから、前記退避させる方向に前記移動体を直進させる、
請求項1記載の制御装置。
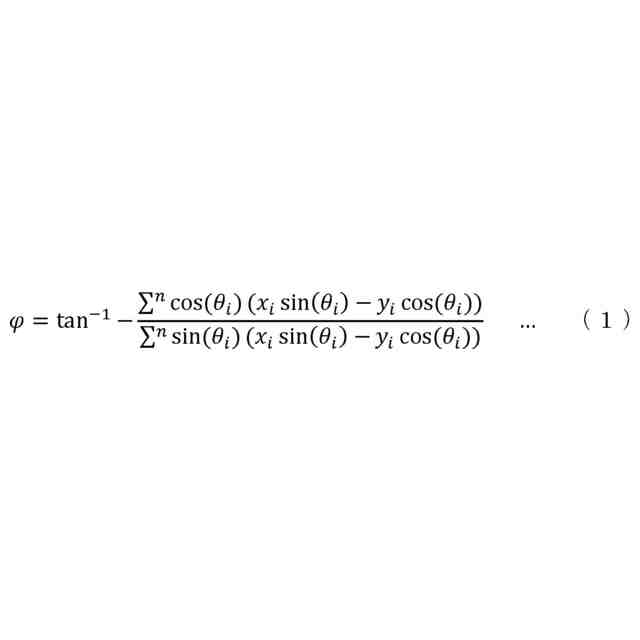
【請求項3】
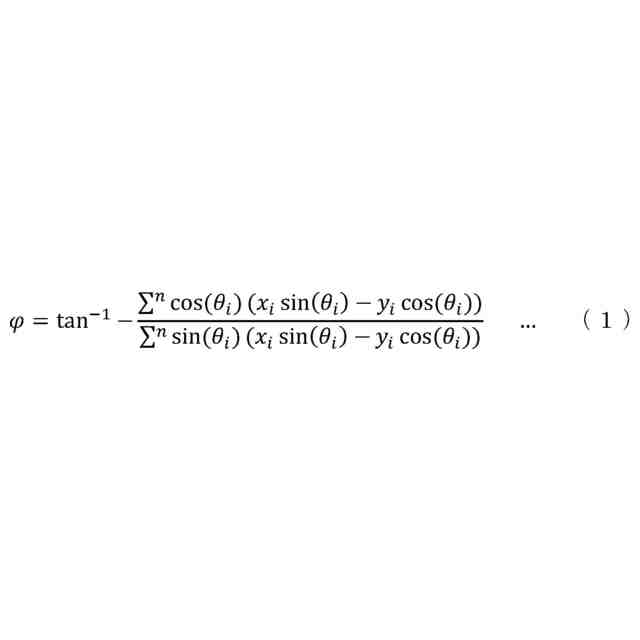
前記制御部は、前記移動体の基準点を原点とするxy直交座標系における以下の式(1)を用いて、前記退避させる方向φを算出する、
JPEG
2024101264000008.jpg
9
170
(ここで、n:正常に動作する残りの全方向移動車輪の個数、i:1~nまでの整数、x
i
:全方向移動車輪の各々の代表点のx座標、y
i
:全方向移動車輪の各々の代表点のy座標、θ
i
:全方向移動車輪の各々の回転面方向とx軸とのなす角度、とする)
請求項2記載の制御装置。
【請求項4】
3個以上の全方向移動車輪を備える移動体において実行される方法であって、
前記全方向移動車輪を制御して前記移動体を移動させるステップを含み、
前記移動体を移動させるステップは、前記全方向移動車輪のいずれかが故障した場合に、前記全方向移動車輪に対する制御方法を、前記全方向移動車輪の各々を制御して前記移動体を移動させる第1制御方法から、正常に動作する残りの全方向移動車輪の各々を制御して前記移動体を移動させる第2制御方法に切り替える、
制御方法。
【請求項5】
前記移動体を移動させるステップは、前記第1制御方法から前記第2制御方法に切り替えた場合に、前記移動体を退避させる方向に前記移動体の向きを回転させてから、前記退避させる方向に前記移動体を直進させる、
請求項4記載の制御方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、全方向移動車輪を制御する制御装置及び制御方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
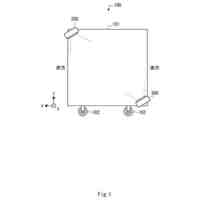
従来、全方向に移動できる移動体として、複数の全方向移動車輪(例えば、オムニホイール)を備える移動体が開発されている(例えば、下記特許文献1参照)。
【先行技術文献】
【特許文献】
【0003】
特開2005-047312号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
複数の全方向移動車輪の各々を制御して移動体を走行させる場合、移動体が所望の方向に所望の速度で走行するように、全方向移動車輪を個別に制御することになる。このとき、例えば、いずれかの全方向移動車輪が故障すると、各車輪に対する制御量のバランスが崩れ、移動体を走行させることが難しくなる。この場合、例えば、移動できなくなった移動体によって作業場の通路が塞がれることや、移動体が稼働する領域に作業員が立ち入ることになり、生産性や安全性が低下する要因になる。
【0005】
そこで、本発明は、全方向移動車輪のいずれかが故障した場合であっても、移動体を退避させることができる制御装置及び制御方法を提供することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様に係る制御装置は、移動体に配置された3個以上の全方向移動車輪を制御する制御装置であって、全方向移動車輪を制御して移動体を移動させる制御部を備え、制御部は、全方向移動車輪のいずれかが故障した場合に、全方向移動車輪に対する制御方法を、全方向移動車輪の各々を制御して移動体を移動させる第1制御方法から、正常に動作する残りの全方向移動車輪の各々を制御して移動体を移動させる第2制御方法に切り替える。
【0007】
この態様によれば、移動体に配置された3個以上の全方向移動車輪のいずれかが故障した場合に、全方向移動車輪に対する制御方法を、全方向移動車輪の各々を制御して移動体を移動させる第1制御方法から、正常に動作する残りの全方向移動車輪の各々を制御して移動体を移動させる第2制御方法に切り替えることができる。これにより、全方向移動車輪のいずれかが故障した場合であっても、正常に動作する残りの全方向移動車輪のみを制御することで移動体を退避させることが可能となる。
【0008】
上記態様において、制御部は、第1制御方法から第2制御方法に切り替えた場合に、移動体を退避させる方向に移動体の向きを回転させてから、退避させる方向に移動体を直進させてもよい。
【0009】
この態様によれば、全方向移動車輪のいずれかが故障した場合に、退避場所に向けて移動体を直進走行させる簡易な走行制御を実行することで移動体を退避させることができる。
【0010】
上記態様において、制御部は、移動体の基準点を原点とするxy直交座標系における以下の式(1)を用いて、退避させる方向φを算出してもよい。
JPEG
2024101264000002.jpg
9
170
(ここで、n:正常に動作する残りの全方向移動車輪の個数、i:1~nまでの整数、x
i
:全方向移動車輪の各々の代表点のx座標、y
i
:全方向移動車輪の各々の代表点のy座標、θ
i
:全方向移動車輪の各々の回転面方向とx軸とのなす角度、とする)
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
株式会社ダイヘン
溶接機
6日前
株式会社ダイヘン
溶接トーチ
3日前
株式会社ダイヘン
電力供給装置
7日前
株式会社ダイヘン
くびれ検出制御方法
24日前
株式会社ダイヘン
2重シールドティグ溶接トーチ
4日前
株式会社ダイヘン
ワイヤレス給電システム及び給電装置
26日前
株式会社ダイヘン
溶接トーチボディおよびガス供給ノズル
11日前
株式会社ダイヘン
溶接用ケーブルおよびそれを備える溶接トーチ
3日前
株式会社FUJI
工作機械
12日前
エイブリック株式会社
定電圧回路
2か月前
エイブリック株式会社
基準電流源
3か月前
井関農機株式会社
作業車両
2か月前
井関農機株式会社
作業車両
2か月前
エイブリック株式会社
基準電流回路
1か月前
ローム株式会社
電源回路
2か月前
井関農機株式会社
自立走行農作業車
2か月前
トヨタ自動車株式会社
制御システム
26日前
トヨタ自動車株式会社
移動システム
2か月前
日昌電気制御株式会社
管理システム
1か月前
株式会社ユタカ
半自動切換装置
1か月前
トヨタ自動車株式会社
設備の制御方法
2か月前
井関農機株式会社
作業車両の作業管理システム
2か月前
株式会社ダイフク
搬送設備
11日前
トヨタ自動車株式会社
マーカースタンド
1か月前
株式会社豊田自動織機
自律走行車両
1か月前
横河電機株式会社
電流源回路
2か月前
株式会社フカデン
外周部加工システム
今日
マキノジェイ株式会社
工作機械
3か月前
住友重機械工業株式会社
自律走行台車
2か月前
個人
ペダル操作検知装置
2か月前
三菱電機株式会社
管理システムおよび管理方法
2か月前
日立建機株式会社
自律走行システム
4日前
大阪瓦斯株式会社
二次圧制御機構
7日前
大阪瓦斯株式会社
二次圧制御機構
7日前
ミツミ電機株式会社
半導体集積回路装置
27日前
アズビル株式会社
パラメータ探索装置および方法
2か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ