TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024096207
公報種別
公開特許公報(A)
公開日
2024-07-12
出願番号
2024070704,2021057608
出願日
2024-04-24,2021-03-30
発明の名称
車両制御装置、地点通知方法及び地点通知用コンピュータプログラム
出願人
トヨタ自動車株式会社
,
株式会社デンソー
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01C
21/26 20060101AFI20240705BHJP(測定;試験)
要約
【課題】車両が自動運転制御を適用可能なエリアに進入する地点をドライバに通知することが可能な車両制御装置を提供する。
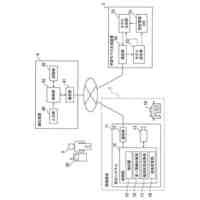
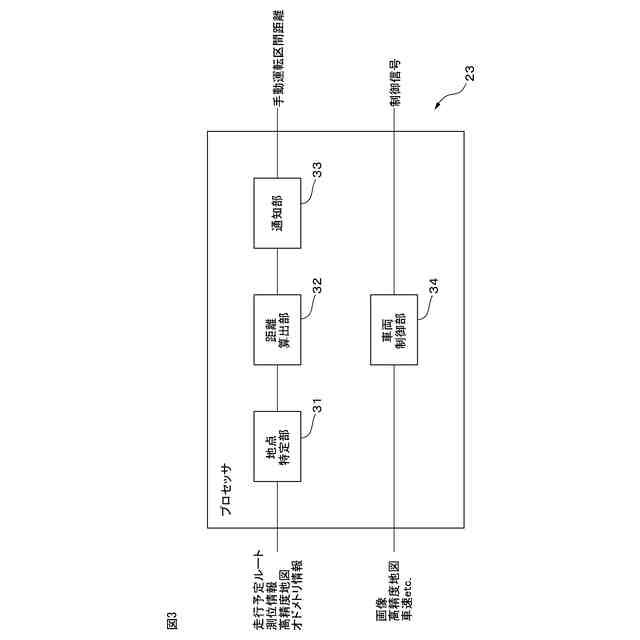
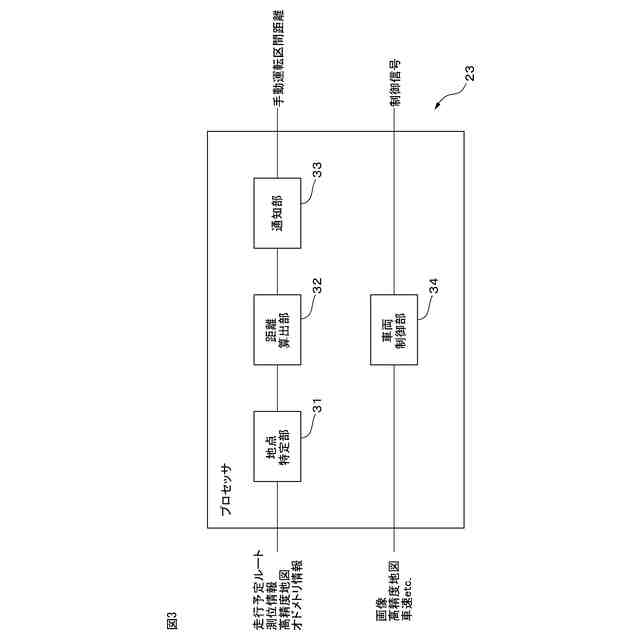
【解決手段】車両制御装置は、所定のエリアについて車両10の自動運転制御において利用される情報を含む地図情報を記憶する記憶部(5、22)と、地図情報を参照して、所定のエリア外にある車両10の現在位置から車両10の目的地への走行予定ルートに沿って車両10が所定のエリアに進入する自動運転開始可能地点を特定する地点特定部31と、自動運転開始可能地点を車両10の車室内に設けられた通知機器6を介して車両10のドライバへ通知する通知部33とを有する。地点特定部31は、地図情報を参照して、所定のエリアへ進入可能な地点を代替進入地点の候補として少なくとも一つ検出し、通知部33は、少なくとも一つの代替進入地点の候補を、通知機器6を介してドライバへさらに通知する。
【選択図】図3
特許請求の範囲
【請求項1】
車両を自動運転制御可能な車両制御装置であって、
所定のエリアについて前記車両の自動運転制御において利用される情報を含む地図情報を記憶する記憶部と、
前記地図情報を参照して、前記所定のエリア外にある前記車両の現在位置から前記車両の目的地への走行予定ルートに沿って前記車両が前記所定のエリアに進入する自動運転開始可能地点を特定する地点特定部と、
前記自動運転開始可能地点を前記車両の車室内に設けられた通知機器を介して前記車両のドライバへ通知する通知部と、を有し、
前記地点特定部は、前記地図情報を参照して、前記所定のエリアへ進入可能な地点を代替進入地点の候補として少なくとも一つ検出し、
前記通知部は、前記少なくとも一つの代替進入地点の候補を、前記通知機器を介して前記ドライバへさらに通知する、
車両制御装置。
続きを表示(約 1,700 文字)
【請求項2】
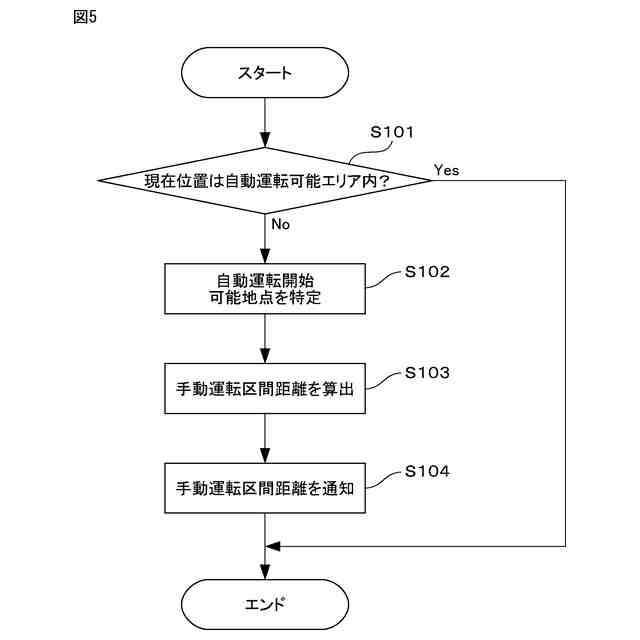
前記走行予定ルートに沿って前記車両の現在位置から前記自動運転開始可能地点までの手動運転区間距離を算出する距離算出部をさらに有し、
前記通知部は、前記手動運転区間距離を、前記通知機器を介して前記ドライバへさらに通知し、
前記記憶部は、走行ルート探索用地図情報をさらに記憶し、
前記距離算出部は、前記少なくとも一つの代替進入地点の候補のそれぞれについて、前記走行ルート探索用地図情報を参照して前記車両の現在位置から当該代替進入地点の候補までのルートを探索するとともに当該ルートに沿って前記車両の現在位置から当該代替進入地点の候補までの距離を算出し、
前記通知部は、前記少なくとも一つの代替進入地点の候補または前記車両の現在位置から前記少なくとも一つの代替進入地点の候補までの距離を、前記通知機器を介してドライバへ通知する、請求項1に記載の車両制御装置。
【請求項3】
前記距離算出部は、前記少なくとも一つの代替進入地点の候補のうち、前記車両の現在位置からの距離が前記手動運転区間距離よりも短い候補の何れかを代替進入地点とし、
前記通知部は、前記代替進入地点または前記車両の現在位置から前記代替進入地点までの距離を、前記通知機器を介してドライバへ通知する、請求項2に記載の車両制御装置。
【請求項4】
前記記憶部は、走行ルート探索用地図情報をさらに記憶し、
前記地点特定部は、前記走行予定ルートが設定されていない場合、前記地図情報を参照して、前記車両の現在位置から前記所定のエリアまでの距離が所定距離以下となる範囲内において前記所定のエリアへ進入可能な地点を進入地点の候補として少なくとも一つ検出し、
前記少なくとも一つの進入地点の候補のそれぞれについて、前記走行ルート探索用地図情報を参照して前記車両の現在位置から当該進入地点の候補までのルートを探索するとともに当該ルートに沿って前記車両の現在位置から当該進入地点の候補までの距離を算出し、かつ、前記少なくとも一つの進入地点の何れかを進入地点とする距離算出部をさらに有し、
前記通知部は、前記進入地点及び前記車両の現在位置から前記進入地点までの距離を、前記通知機器を介してドライバへ通知する、請求項1に記載の車両制御装置。
【請求項5】
車両に搭載されたプロセッサが、所定のエリアについて前記車両の自動運転制御において利用される情報を含む地図情報を参照して、前記所定のエリア外にある前記車両の現在位置から前記車両の目的地への走行予定ルートに沿って前記車両が前記所定のエリアに進入する自動運転開始可能地点を特定し、
前記プロセッサが、前記自動運転開始可能地点を前記車両の車室内に設けられた通知機器を介して前記車両のドライバへ通知し、
前記プロセッサが、前記地図情報を参照して、前記所定のエリアへ進入可能な地点を代替進入地点の候補として少なくとも一つ検出し、
前記プロセッサが、前記少なくとも一つの代替進入地点の候補を、前記通知機器を介して前記ドライバへさらに通知する、
ことを含む地点通知方法。
【請求項6】
所定のエリアについて車両の自動運転制御において利用される情報を含む地図情報を参照して、前記所定のエリア外にある前記車両の現在位置から前記車両の目的地への走行予定ルートに沿って前記車両が前記所定のエリアに進入する自動運転開始可能地点を特定し、
前記自動運転開始可能地点を前記車両の車室内に設けられた通知機器を介して前記車両のドライバへ通知し、
前記地図情報を参照して、前記所定のエリアへ進入可能な地点を代替進入地点の候補として少なくとも一つ検出し、
前記少なくとも一つの代替進入地点の候補を、前記通知機器を介して前記ドライバへさらに通知する、
ことを前記車両に搭載されたプロセッサに実行させるための地点通知用コンピュータプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両を自動運転制御可能な車両制御装置、及び、所定の地点を通知する地点通知方法及び地点通知用コンピュータプログラムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
車両を自動運転制御するための技術の研究及びそのためのインフラストラクチャーの構築が進んでいる。そのため、車両が目的地まで向かう走行予定ルートにおいて、自動運転制御の適用が可能な区間とそうでない区間とが混在することがある。このような場合において、ドライバの利便性を向上するために、自動運転制御が適用可能な区間に関する情報をドライバへ通知する技術が提案されている(特許文献1及び2を参照)。
【0003】
特許文献1に開示された運転支援システムは、ナビゲーションシステムによって事前に決定された車両の走行予定ルートにおいて、自動運転制御が適用可能な区間の開始地点を判定する。そしてこの運転支援システムは、車両の現在位置からその開始地点までの距離を求めて、その距離をドライバへ通知する。
【0004】
また、特許文献2に開示された情報表示装置は、目的地までの経路を探索し、その経路に含まれる区間が、自動運転が可能である区間、または自動運転が不可である区間の何れであるかを判定する。そしてこの情報表示装置は、自動運転が可能な区間から自動運転が不可となる区間に切り替わる地点を表す情報を、イベントポイントに関連する情報を現在地から目的地までの順に並べたポイント案内画像に表示させる。
【先行技術文献】
【特許文献】
【0005】
米国特許出願公開第2016/0231743号
特開2018-77086号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
ドライバの利便性を向上するためには、自動運転制御を適用可能な区間に進入する地点についての情報をドライバに通知することが求められる。
【0007】
そこで、本発明は、車両が自動運転制御を適用可能なエリアに進入する地点をドライバに通知することが可能な車両制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
一つの実施形態によれば、車両を自動運転制御可能な車両制御装置が提供される。この車両制御装置は、所定のエリアについて車両の自動運転制御において利用される情報を含む地図情報を記憶する記憶部と、地図情報を参照して、所定のエリア外にある車両の現在位置から車両の目的地への走行予定ルートに沿って車両が所定のエリアに進入する自動運転開始可能地点を特定する地点特定部と、自動運転開始可能地点を車両の車室内に設けられた通知機器を介して車両のドライバへ通知する通知部と、を有し、地点特定部は、地図情報を参照して、所定のエリアへ進入可能な地点を代替進入地点の候補として少なくとも一つ検出し、通知部は、少なくとも一つの代替進入地点の候補を、通知機器を介してドライバへさらに通知する。
【0009】
この車両制御装置は、走行予定ルートに沿って車両の現在位置から自動運転開始可能地点までの手動運転区間距離を算出する距離算出部をさらに有し、通知部は、手動運転区間距離を、通知機器を介してドライバへさらに通知し、記憶部は、走行ルート探索用地図情報をさらに記憶し、距離算出部は、少なくとも一つの代替進入地点の候補のそれぞれについて、走行ルート探索用地図情報を参照して車両の現在位置からその代替進入地点の候補までのルートを探索するとともに探索したルートに沿って車両の現在位置からその代替進入地点の候補までの距離を算出し、通知部は、少なくとも一つの代替進入地点の候補または車両の現在位置から少なくとも一つの代替進入地点の候補までの距離を、通知機器を介してドライバへ通知する。
【0010】
また、この車両制御装置において、距離算出部は、少なくとも一つの代替進入地点の候補のうち、車両の現在位置からの距離が手動運転区間距離よりも短い候補の何れかを代替進入地点とし、通知部は、代替進入地点または車両の現在位置から代替進入地点までの距離を、通知機器を介してドライバへ通知する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
甲神電機株式会社
電流センサ
5日前
アズビル株式会社
差圧計
2日前
アズビル株式会社
調節計
8日前
株式会社小野測器
検出器
8日前
株式会社小野測器
測定器
8日前
アズビル株式会社
差圧計
3日前
大和製衡株式会社
組合せ秤
2日前
株式会社トプコン
測量装置
8日前
アズビル株式会社
圧力センサ
2日前
株式会社カネカ
検出システム
8日前
株式会社ミツトヨ
変位測定器
2日前
日本碍子株式会社
ガスセンサ
8日前
エイブリック株式会社
電流検出回路。
8日前
株式会社ナリス化粧品
肌状態推定方法
8日前
日本碍子株式会社
ガスセンサ素子
8日前
エスペック株式会社
環境形成装置
2日前
日本碍子株式会社
ガスセンサ素子
3日前
東レ株式会社
選択結合性物質固定化担体
2日前
日本碍子株式会社
ガスセンサ素子
8日前
三菱マテリアル株式会社
温度センサ
12日前
日本碍子株式会社
センサ素子
3日前
日本碍子株式会社
センサ素子
3日前
セコム株式会社
適応装置
3日前
パイロットインキ株式会社
温度管理システム
1日前
マレリ株式会社
推定装置
1日前
ローム株式会社
半導体集積回路
1日前
TDK株式会社
計測装置
12日前
住友重機械工業株式会社
回転装置
9日前
個人
レーダ反射断面積計測用装置
2日前
株式会社豊田自動織機
電動圧縮機
5日前
オムロン株式会社
光センサ
11日前
キヤノン株式会社
計測装置
2日前
株式会社島津製作所
GC用ガス監視装置
8日前
セコム工業株式会社
物体検知装置
8日前
株式会社デンソー
レーダ装置
5日前
東洋製罐株式会社
巻締寸法測定装置
3日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ