TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024086502
公報種別
公開特許公報(A)
公開日
2024-06-27
出願番号
2022201664
出願日
2022-12-17
発明の名称
血液検体中の凝集物判定装置
出願人
株式会社オートニクス
代理人
個人
主分類
G01N
35/02 20060101AFI20240620BHJP(測定;試験)
要約
【課題】 血液試料を採取した血液検体収容容器を十分に攪拌でき、かつ、高精度の凝集物の存在の有無の判定ができる血液検体中の凝集物判定装置を得る。
【解決手段】血液検体が採取された検体容器を、その長手方向軸線を中心に周方向回動させながら、その長手方向略中心位置を中心に径方向回動させる駆動部と、駆動部による検体容器の径方向回動に追従して移動し、検体容器の所定の撮像領域を定点撮像するように前記駆動部に設けられた撮像手段と駆動部及び撮像手段の動作を制御する制御装置とを備え、制御装置が、駆動部による検体容器の周方向及び径方向回動によって検体容器の内面に形成された血液検体の塗膜を撮像手段によって連続撮像し、得られた画像をその輝度分布を空間フィルタ処理により画像処理し、画像処理後の画像データに基づいて凝集物の存在の有無を判定するように構成されていることを特徴とする血液検体中の凝集物判定装置を提供する。
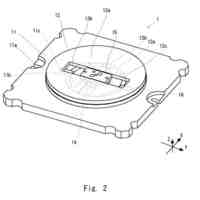
【選択図】 図2
特許請求の範囲
【請求項1】
血液検体が採取された検体容器を保持し、前記検体容器を、その長手方向軸線を中心に一方向及び逆方向に周方向回動させながら、その長手方向略中心位置を中心に一定の回転角度で一方向及び逆方向に交互に径方向回動させる駆動部(2,10)と、
前記駆動部(2,10)による検体容器の前記径方向回動に追従して移動し、検体容器の所定の撮像領域を定点撮像するように前記駆動部に設けられた撮像手段(22)と
前記駆動部(2,10)及び撮像手段(22)の動作を制御する制御装置(24)と
を備え、
前記制御装置(24)が、
前記駆動部(2,10)による検体容器の周方向及び径方向回動によって検体容器の内面に血液検体の塗膜を形成し、該塗膜を前記撮像手段(22)によって連続撮像し、
得られた画像を、その輝度分布を空間フィルタ処理することで画像処理し、
画像処理後の画像データに基づいて凝集物の存在の有無を判定する
ように構成されている
ことを特徴とする血液検体中の凝集物判定装置。
続きを表示(約 970 文字)
【請求項2】
前記駆動部(2,10)が、
検体容器を、その長手方向略中心位置を中心に一定の回転角度で一方向及び逆方向に径方向回動させ、検体容器の底部を最上位置と最下位置との間で往復動させる径方向回動駆動部(2)と、
検体容器を、その長手方向軸線を中心に周方向回動させる周方向回動駆動部(10)と
から成り、
前記周方向回動駆動部(10)が、前記径方向回動駆動部(2)の動きに連動して動作するよう構成されている
ことを特徴とする請求項1に記載の凝集物判定装置。
【請求項3】
前記径方向回動駆動部(2)が、モータ(3)により駆動する駆動軸(7)と、前記駆動軸(7)に回転可能に保持された一対の従動ローラ(8,9)を備え、
前記周方向回動駆動部(10)が、前記駆動軸(7)に設けられ、前記駆動軸(7)の回転運動により周方向回動する周方向駆動ローラ(17)を備え、
検体容器が、前記従動ローラ(8,9)及び前記周方向駆動ローラ(17)によって三点支持されるように構成されている
ことを特徴とする請求項2に記載の凝集物判定装置。
【請求項4】
前記周方向回動駆動部(10)が、駆動軸(7)の回転運動により、自転しながら駆動軸(7)の軸線を中心として円運動するゴムライニングローラ(11)と、
前記ゴムライニングローラ(11)の自転を前記周方向駆動ローラ(17)の駆動軸(12)に伝達する動力伝達手段(13,14,15,16)と
を備え、
前記駆動軸(7)の回転により検体容器が径方向回動している間に、前記ゴムライニングローラ(11)の自転により検体容器が周方向回動するように構成した
ことを特徴とする請求項3に記載の凝集物判定装置。
【請求項5】
前記制御装置(24)が、前記駆動軸(7)を一定の速度で正転及び逆転するようにモータ(3)を制御する請求項3に記載の凝集物判定装置。
【請求項6】
前記制御装置(24)が、検体容器の底部を最上位置と最下位置との間にある時に、前記駆動軸(7)の回転速度を低下させるように構成されている
ことを特徴とする請求項3に記載の凝集物判定装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、血液試料を収容する血液検体収容容器を撮像し、撮像画像に基づいて血液検体容器中に凝集物が発生しているか否かを判定する血液検体中凝集物判定装置に関する。
続きを表示(約 9,100 文字)
【背景技術】
【0002】
臨床検査に使用する血液検体は専用容器に採取し血液検査に供される。そして、血液中の成分分析を自動的に行う血液分析装置は、吸引管により血液検体容器から血液試料の一部を吸引し、流路を経由して吸引された血液を分析するように構成されている。
このため血液検体中に凝集物が存在すると、吸引管により血液資料を吸引する際に、血液分析装置に凝集物が吸い込まれ、吸引状態が不安定になるという問題があり、場合によっては、凝集物が吸引管や流路に詰まって分析が停止するという深刻な問題に繋がる。このような状態になると、血液分析装置の分解洗浄や部品交換をしなければならなくなる。
上記した問題が発生しないように、血液採取時に凝集物の存在を確認し、凝集物が存在する血液試料を分析装置に投入しないよう仕分けるスクリーニングが必要となる。
従来は、このスクリーニングを技師の手技及び目視により行われていたが、これを自動化する装置が提案されている(特許文献1)。
【先行技術文献】
【特許文献】
【0003】
特許第3957864号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
上記した特許文献1に係る装置は、血液を採取した試験管内の血液試料を第1の状態で撮像し、次いで、前記試験管を第2の状態に動かした後、試験管内の血液試料を第2の状態で撮像し、撮像した画像をそれぞれ2値化処理して、それぞれの画像の面積を算出し、第1の状態での画像の面積から第2の状態での画像の面積を減算し、その結果を所定の基準値と比較することにより血液が凝固しているか否かの判定を行うように構成されている。
しかしながら上記した従来の装置では、血液試料を撮像する際の照明の分布それ自体が照明の中心が明るく周囲が暗くなるなどの2値化する閾値に対する誤差要因として残り、判定精度が低下して効果を十分に発揮できない問題があった。
また、臨床においては血液検体を採取した直後に、予め検体容器に封入された抗凝固剤や解糖阻止剤等の試薬と攪拌混合することが求められているが、十分な攪拌及び混和ができていないことがあり、血液性状によっては、これが凝集物発生の原因になる場合がある。
本発明は、上記した従来の問題点を解決し、血液試料を採取した血液検体収容容器を十分に攪拌及び混和ができ、かつ、凝集物の存在の有無を精度よく判定することができる血液検体中の凝集物判定装置を提供することを目的としている。
【課題を解決するための手段】
【0005】
上記した目的を達成するために、本発明に係る血液検体中の凝集物判定装置は、血液検体が採取された検体容器を保持し、前記検体容器を、その長手方向軸線を中心に一方向及び逆方向に周方向回動させながら、その長手方向略中心位置を中心に一定の回転角度で一方向及び逆方向に交互に径方向回動させる駆動部と、前記駆動部による検体容器の前記径方向回動に追従して移動し、検体容器の所定の撮像領域を定点撮像するように前記駆動部に設けられた撮像手段と、前記駆動部及び撮像手段の動作を制御する制御装置とを備え、前記制御装置が、前記駆動部による検体容器の周方向及び径方向回動によって検体容器の内面に血液検体の塗膜を形成し、該塗膜を前記撮像手段によって連続撮像し、得られた画像を、その輝度分布を空間フィルタ処理することで画像処理し、画像処理後の画像データに基づいて凝集物の存在の有無を判定するように構成されていることを特徴とする。
前記駆動部は、検体容器を、その長手方向略中心位置を中心に一定の回転角度で一方向及び逆方向に径方向回動させ、検体容器の底部を最上位置と最下位置との間で往復動させる径方向回動駆動部と、検体容器を、その長手方向軸線を中心に周方向回動させる周方向回動駆動部とから成り得、前記周方向回動駆動部は、前記径方向回動駆動部の動きに連動して動作するよう構成され得る。
また、前記径方向回動駆動部は、モータにより駆動する駆動軸と、前記駆動軸に回転可能に保持された一対の従動ローラを有し得、かつ、前記周方向回動駆動部は、前記駆動軸に設けられ、前記駆動軸の回転運動により周方向回動する周方向駆動ローラを有し得、検体容器は、前記従動ローラ及び前記周方向駆動ローラによって三点支持されるように構成され得る。
この場合、前記周方向回動駆動部は、駆動軸の回転運動により、自転しながら駆動軸の軸線を中心として円運動するゴムライニングローラと、前記ゴムライニングローラの自転を前記周方向駆動ローラの駆動軸に伝達する動力伝達手段とを有し得、前記駆動軸の回転により検体容器が径方向回動している間に、前記ゴムライニングローラの自転により検体容器が周方向回動するように構成され得る。
前記自転駆動部は、駆動軸の回転運動により、周方向回動しながら駆動軸の軸線を中心として円運動するゴムライニングローラと、前記ゴムライニングローラの周方向回動を前記周方向駆動ローラの自転駆動軸に伝達する動力伝達手段とを有し得、前記駆動軸の回転により検体容器が回動運動している間に、前記ゴムライニングローラの周方向回動により検体容器が周方向回動するように構成され得る。
前記制御装置は、前記駆動軸を一定の速度で正転及び逆転するようにモータを制御してもよく、また、検体容器の底部を最上位置と最下位置との間にある時に、前記駆動軸の回転速度を低下させるようにモータを制御してもよい。
【発明の効果】
【0006】
本発明に係る血液検体中の凝集物判定装置は、血液検体が採取された検体容器を保持し、前記検体容器を、その長手方向軸線を中心に一方向及び逆方向に周方向回動させながら、その長手方向略中心位置を中心に一定の回転角度で一方向及び逆方向に交互に径方向回動させる駆動部と、前記駆動部による検体容器の前記径方向回動に追従して移動し、検体容器の所定の撮像領域を定点撮像するように前記駆動部に設けられた撮像手段と、前記駆動部及び撮像手段の動作を制御する制御装置とを備え、前記制御装置が、前記駆動部による検体容器の周方向及び径方向回動によって検体容器の内面に血液検体の塗膜を形成し、該塗膜を前記撮像手段によって連続撮像し、得られた画像を、その輝度分布を空間フィルタ処理することで画像処理し、画像処理後の画像データに基づいて凝集物の存在の有無を判定するように構成されているので、技師の手技による検体容器の攪拌及び混和動作を再現しながら、検体容器の内面に血液検体の塗膜を形成することができ、その塗膜を撮像して得られた画像を、その輝度分布を空間フィルタ処理することで画像を処理しているので、検体の量及び検体の事前の攪拌及び混和状態に依存することなく、かつ、2値化する閾値に対する誤差要因となり得る周囲の照明に依存することなく、凝集物の存在の有無を精度よく判定することが可能になる。
【図面の簡単な説明】
【0007】
技師の手技による凝集物の目視確認方法を説明する図である。
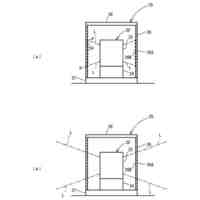
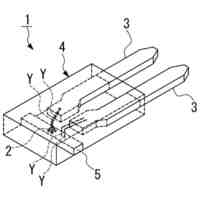
本発明に係る凝集物判定装置における検体容器の動きを説明する図である。
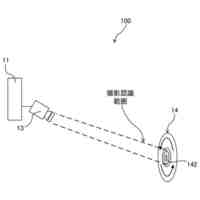
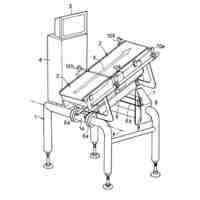
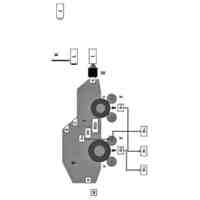
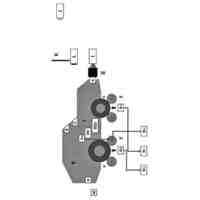
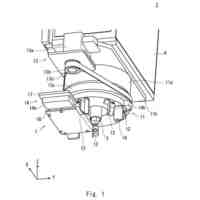
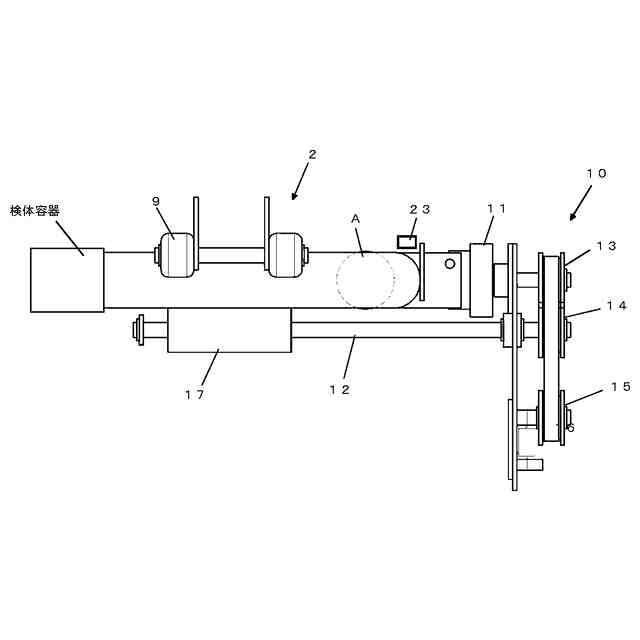
本発明に係る凝集物判定装置の概略上面図である。
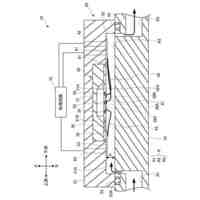
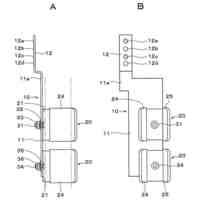
図3に示した凝集物判定装置の概略正面図である。
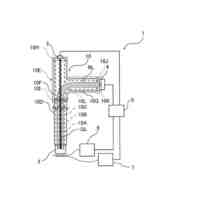
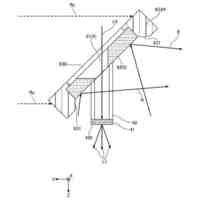
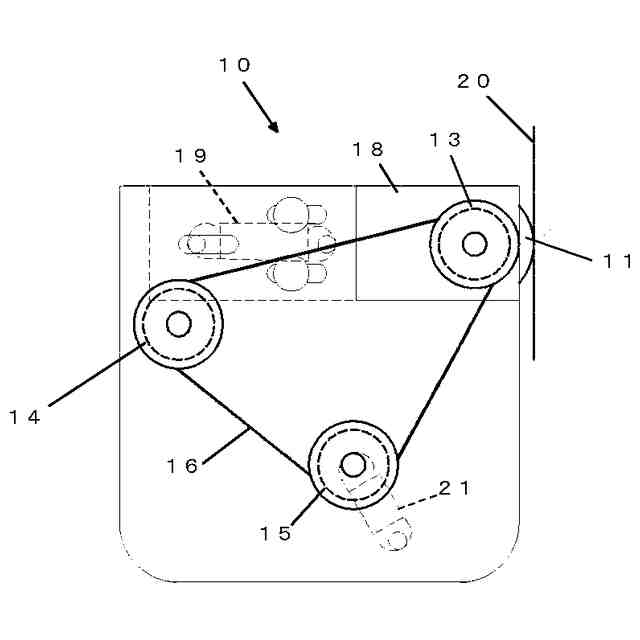
図3に示した凝集物判定装置を自転駆動部側から見た概略側面図である。
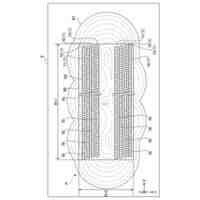
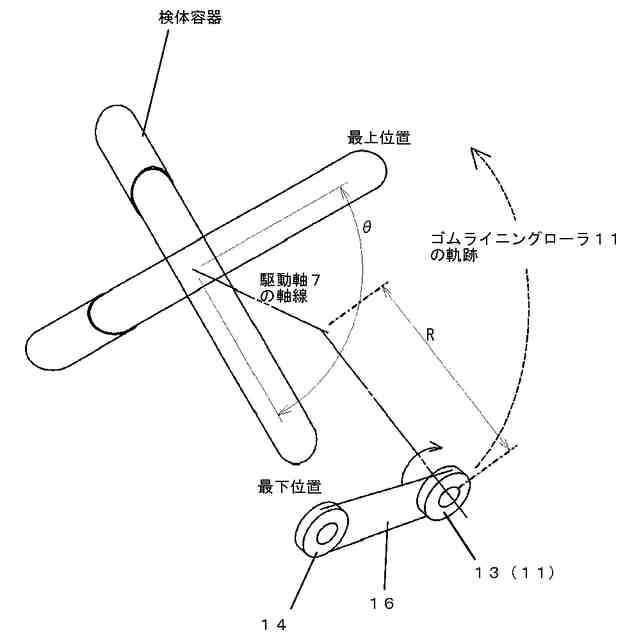
凝集物判定装置によって動かされている検体容器の動作を模式的に示す図である。
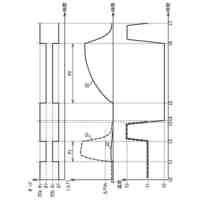
容器検体の底部が最下位置から最上位置に回動される前記検体容器の捩じり回動動作における最上位置、最下位置及び最上位置と最下位置との間の中間位置においてカメラで撮像した画像を示す図である。
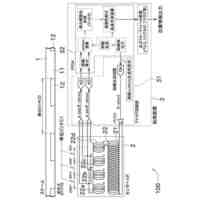
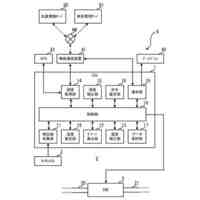
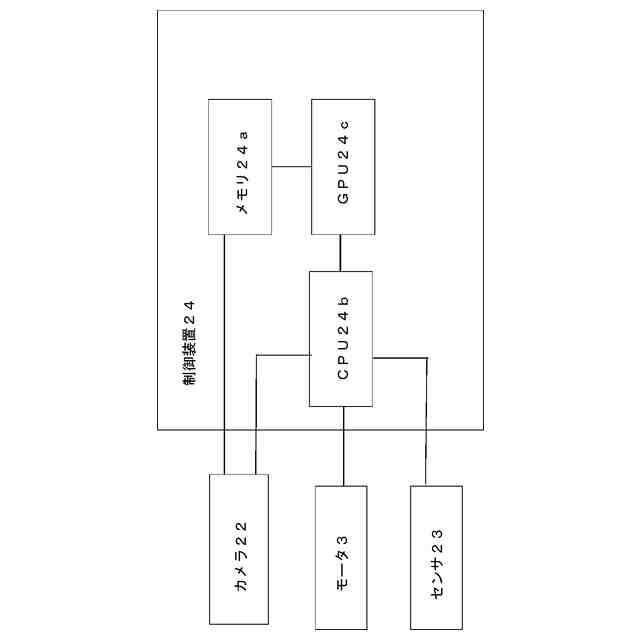
制御装置の概略ブロック図である。
カメラで撮像された原画像と、該原画像から空間フィルタ処理をした検出画像との一例を示す図である。
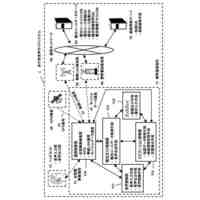
制御装置による制御の流れを概略的に示すフローチャートである。
【発明を実施するための形態】
【0008】
以下、添付図面に示す一実施例を参照して、本発明に係る血液検体中の凝集物判定装置(以下、単に「凝集物判定装置」と称する。)の実施の形態について説明していく。
始めに図1を参照して、技師の手技による凝集物の目視確認方法について簡単に説明する。
技師が手技により血液検体中の凝集物の目視確認を行う場合、図1に示すように、血液検体が採取された検体容器の蓋部分を持ち、検体容器の蓋部側と底部側が逆転するように上下に振り、検体容器の底部が上限位置にある時に、検体容器を指先でねじりながら検体容器の底部を目視し、凝集物の有無を目視検査する。また、検体容器の底部が下限位置にある時にも、検体容器を指先で逆方向にねじり戻して次の上限位置でのねじりに備える。検体容器が上限位置及び下限位置以外にある時には検体容器中での血液検体の流れを監視する。この作業を数回繰り返す。
上記したように、技師が手技により血液検体中の凝集物の目視確認を行う場合、単に検体容器を上下に振るだけでなく、検体容器を捩じりながら上下に振る。これにより、攪拌及び混和が十分にでき、かつ、検体容器中の血液検体が検体容器の内面に沿って流れるようになるので凝集物の目視確認が行い易くなる。
本発明に係る凝集物判定装置は、上記した技師の手技による検体容器の挙動を簡単な構造で実現しながら、検体容器内の血液検体の凝集物の有無の判定を行うことができるように構成されている。
【0009】
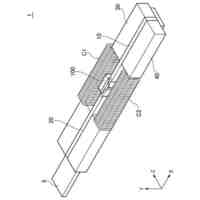
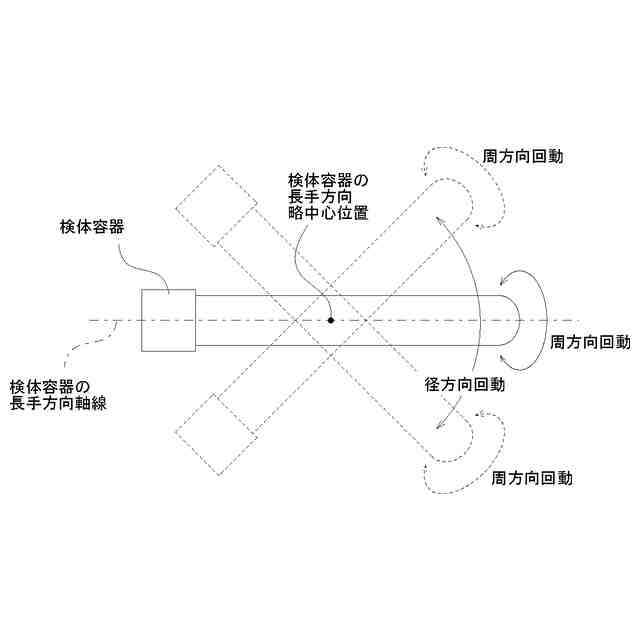
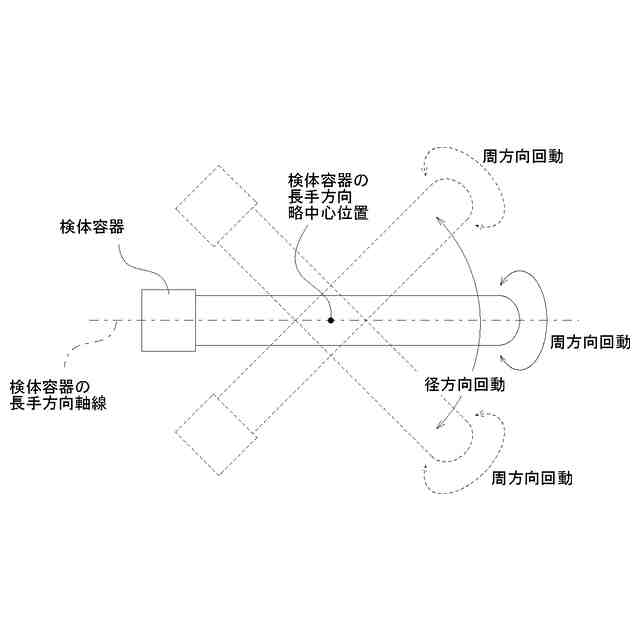
始めに、本発明に係る凝集物判定装置は、図2に示すように、検体容器を、その長手方向軸線を中心として一方向及び逆方向に回転させながら、その長手方向略中心位置を中心として一定の角度で一方向及び逆方向に回転させる過程で得た情報に基づいて検体容器内の血液検体の凝集物の有無の判定を行うように構成されている装置である。
本明細書では、
検体容器の、その長手方向軸線を中心とした一方向及び逆方向の回転運動を「周方向回動」と称し、
検体容器の、その長手方向略中心位置を中心とした一方向及び逆方向の回転運動を「径方向回動」と称する。
以下に、図3~図5を参照して本発明に係る凝集物判定装置の一実施例の構成について説明していく。
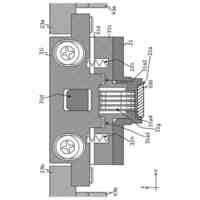
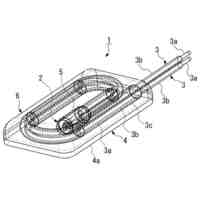
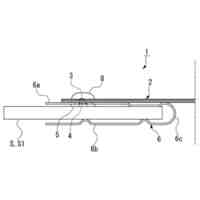
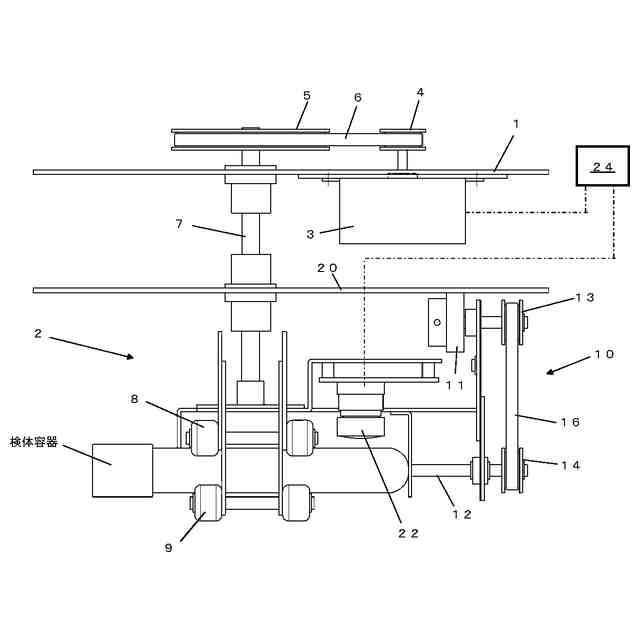
図3は凝集物判定装置の概略上面図であり、図4は図3に示した凝集物判定装置の概略正面図であり、図5は凝集物判定装置を自転駆動部側から見た概略側面図を各々示している。
図中符号1は、フレームを示しており、該フレーム1には、検体容器を、その長手方向略中心位置を中心として一定の回転角度で一方向及び逆方向に交互に回転駆動する、即ち、検体容器を径方向回動させる径方向回動駆動部2と、前記径方向回動駆動部2を作動させるモータ3とが固定されている。
前記径方向回動駆動部2は、一端がプーリ4及び5並びにベルト6を介してモータ2により回転駆動される駆動軸7と、前記駆動軸7の先端にブラケット(符号なし)を介して回転可能に固定された検体容器保持用の一対の従動ローラ8及び9を備えている。
また、前記径方向回動駆動部2の駆動軸7には、検体容器に捩じり動作を加えるように、検体容器を、その中心軸線を中心に一方向及び逆方向に回転させる、即ち、検体容器を周方向回動させる周方向回動駆動部10が設けられている。前記周方向回動駆動部10は、ブラケット(符号なし)を介して前記駆動軸7に設けられ、駆動軸7の回転に伴い、駆動軸7の中心軸線を中心とした円運動を行うゴムライニングローラ11を備えている。また、周方向回動駆動部10は、検体容器の周方向回動用の駆動軸12と、前記ゴムライニングローラ11の円運動中に生じる回転を駆動軸12に伝達する一対のプーリ13、14、アイドルローラ15、及びベルト16を備え、前記駆動軸12の先端には周方向駆動ローラ17が設けられている。
検体容器は、前記従動ローラ8及び9と、前記周方向駆動ローラ17とによって三点保持されており、周方向駆動ローラ17の回転により周方向回動する。
前記ゴムライニングローラ11は、図5に示すように、摺動板18に設けられ、スプリング19によって、径方向回動駆動部2の駆動軸7が貫通するガイドフレーム20に押圧されており、径方向回動駆動部2の駆動軸7の回転に伴いガイドフレーム20上で円運動する際に、ガイドフレーム20との摩擦により回転するように構成されている。また、図5に示すように、アイドルローラ15は、スプリング21によってベルト16にテンションをかけるように構成されている。
さらに、上記したように構成された径方向回動駆動部2の駆動軸7には、径方向回動駆動部2と共に回転しながら、動作中に保持された検体容器の底部付近を定点で連続的に撮像するカメラ22が設けられている。図4中、符号Aは、カメラ22によって撮像される撮像領域を示している。前記カメラ22は、その撮像領域が、検体容器の円柱部分における最も底部に近い領域を視野するように位置決めされており、これにより、検体容器の蓋部の大小の制約や、検体容器へ貼り付けられたラベルやダイレクト印刷等を避けて、検体容器内の血液検体を確実に撮像することを可能にしている。
また、図4に示すように、前記一対の従動ローラ8及び9並びに周方向駆動ローラ17によって検体容器を三点支持する位置には、検体容器の有無を検知するセンサ23が設けられており、該センサの出力で検体容器が正確に挿入されているか否かを検知する。
前記モータ3は、一方向及び逆方向、即ち、時計回り及び反時計回りの回転方向の制御、速度制御及び位置制御を数値により容易に実行できるステッピングモータであることが好ましい。
上記したように構成された凝集物判定装置は、さらに、制御装置24を備え、該制御装置24によってモータ3及びカメラ22の動作が制御され、かつ、カメラ22から入力される画像データに基づいて、検体溶液内の血液試料中の凝集物の有無を判断することができるように構成されている。
【0010】
次に、上記したように構成された凝集物判定装置の機械的動作について説明する。
上記した凝集物判定装置は、制御装置24によって、モータ3及びカメラ22の動作が制御される。
モータ3は、容器検体を、その長手方向中心を中心に一方向及び逆方向に交互に一定の回転角度、例えば、45度回転させるように、即ち、径方向回動するように駆動軸7を駆動する。駆動軸7が回転すると、駆動軸7に設けられた従動ローラ8及び9並びに周方向回動駆動部10の駆動軸12に設けられた周方向駆動ローラ17によって三点支持された検体容器が一方向又は逆方向に径方向回動する。
駆動軸7の回転に伴い駆動軸7に設けられた周方向回動駆動部10のゴムライニングローラ11が、ガイドフレーム20上で駆動軸7の軸線を中心とした円運動を行い、この円運動の間、ゴムライニングローラ11は、ガイドフレーム20との摩擦により回転する。このゴムライニングローラ11の回転は、プーリ13、14及びアイドルローラ15並びにベルト16を介して駆動軸12に伝達され、駆動軸12が周方向駆動ローラ17と共に回転駆動する。周方向駆動ローラ17は、検体容器を三点支持しており検体容器に接触しているため、周方向駆動ローラ17の回転に伴って検体容器は、その長手方向軸線を中心に一方向又は逆方向に周方向回動する。
従って、モータ3によって駆動軸7が一定の回転角度で一方向に回転されると、検体容器は、その長手方向軸線を中心に一方向に周方向回動しながら、その長手方向略中心位置を中心として一方向に径方向回動する。
検体容器を所定の角度まで回転した後、モータ3を逆転させると、検体容器は、逆方向に周方向回動しながら、逆方向に径方向回動する。
この検体容器の周方向回動しながら径方向回動する動作を「捩じり回動動作」と称する。
この検体容器の動作は、技師が手技で検体容器を捩じりながら上下に振る動作に相当し、これにより、検体容器は技師の手技と同様の動きをすることになる。
図6は、凝集物判定装置によって動かされている検体容器の動作を模式的に示す図である。
前記説明における検体容器の径方向回動中の周方向回動の回転数は式1、式2のように求められる。
検体容器の周方向回動の回転数
=ゴムライニングローラ1ストロークの軌跡長÷ゴムライニングローラの円周長さ:式1
ここで、ゴムライニングローラ1ストロークの軌跡長は次式2の通りである。
ゴムライニングローラ1ストロークの軌跡長
=ゴムライニングローラ回転直径R×円周率π×回転角θ÷360度:式2
従って、周方向回動駆動部10のプーリ13及び14の直径を同一にすれば、ゴムライニングローラ11の回転数と、周方向駆動ローラ17の回転数とは同一となり、また、例えばゴムライニングローラ11の直径を20φ、ゴムライニングローラ回転直径Rを60mm、回転角θを90°にすると、周方向駆動ローラ17は1.5回転することになり、周方向駆動ローラ17の直径を検体容器の直径とほぼ同一とすることで、検体容器も1.5回転することになる。実際には若干の滑りがあるので1.5回転未満となるが、定点位置で撮像するカメラから見て必要にして十分な回転となる。
この径方向回動駆動部2及び周方向回動駆動部10による検体容器の捩じり回動動作は、予め決めた所定回数実行される。
カメラ22は、上記した検体容器の捩じり回動動作中、検体容器の底部が最も上にくる最上位置及び検体容器の底部が最も下にくる最下位置において撮像領域Aの撮像を行い、同時に、最上位置から最下位置へ、又は最下位置から最上位置に検体容器の底部が移動している間も撮影領域Aの撮像を連続的に行う。
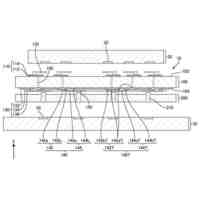
図7は、容器検体の底部が最下位置から最上位置に回動される前記検体容器の捩じり回動動作における最上位置、最下位置及び最上位置と最下位置との間の中間位置においてカメラ22で撮像した画像を示している。尚、中間位置は最上位置と最下位置との間の任意の位置であり、また、図7では三つの画像が表示されているが、これはカメラ22で撮影する回数を表しているものではなく、連続して撮影した画像の三つを示すものである。
図7に示された画像は、凝集物の存在しない血液検体を撮像した画像であり、この図に示すように、凝集物が存在しない血液検体の場合、最上位置で撮像した画像が最も色が薄く、最下位置で撮像した画像が最も色が濃く、中間位置で撮像した画像は綺麗なグラデーション画像となる。
また、図7で例示した検体容器の径方向回動の方向において、検体容器は、それが中間位置を通過する際、その長手方向中心を中心に周方向回動しており、具体的には、前記検体容器は前記カメラ22から見て前記検体容器の撮像側がせりあがる方向に周方向回動しているので、検体容器内では血液検体による検体内面の濡れ面がせりあがり、血液検体による前記検体容器の内面への塗布がまんべんなく行われることになる。これにより血液検体が少量の場合でも検体容器の周方向回動により血液検体が検体容器の内面にまんべんなく塗布されるので、凝集物の判別を行うことが可能になる。このせり上がりで前記検体容器の内面が血液検体により濡れている状態は図1における技師が手技で検体容器をねじりながら目視する状態に相当する。
前記したカメラ22によって撮像された画像は、制御装置24に送られる。
上記したように構成された凝集物検出装置は、さらに、不図示の照明手段を備えている。前記照明手段は、白色光の間接照明を複数個所に設けてなり、カメラ22による撮像時に検体容器における撮像領域の陰影が緩和されるように構成されている。
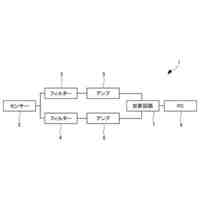
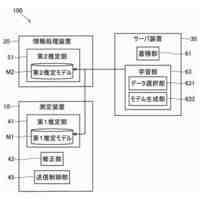
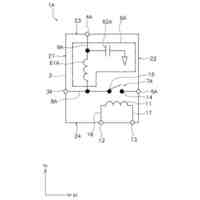
図8は、制御装置24の概略ブロック図であり、図面に示すように、制御装置24は、メモリ23a、CPU23b及びGPU(グラフィックス・プロセッシング・ユニット)23cを備え、モータ3、カメラ22及びセンサ23と接続され、センサ23からの信号に基づいて検体容器の挿入が検知されるとモータ3の駆動制御を行うと共に、カメラ22からの入力画像を画像処理して凝集物の存在の有無の判定を行う。
具体的には、カメラ22で撮像された画像はメモリ24aに記憶され、GPU24cにおいてRGB画像をYUVデータ(輝度信号(Y)と、輝度信号と青色成分の差(U)、輝度信号と赤色成分の差(V)の3つの組み合わせデータ)に変換し、輝度情報であるY値を用い空間フィルタ処理によって中間周波数成分を抽出することで凝集物の無いグラデーション領域の低周波成分とノイズなどの高周波成分を除去して凝集物を浮き出させる。図9に、カメラ22で撮像された原画像から空間フィルタ処理をした検出画像の例を示す。CPU24bは、GPU24cによって処理された画像に基づいて、予め記憶されたプログラムにより凝集物の有無を判定する。具体的には、例えば、微分フィルタ(エッジ検出処理)により浮き出た濃淡の変化量を求め、CPU24bは、GPU24cによって処理された画像に基づいて、濃淡の変化量に対してあらかじめ設定しておいた数値を越えたピーク値を凝集物として判定する。この画像処理に基づく凝集物の判定方法は、本実施例に限定されることなく、公知の様々な判定方法を用いることができる。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
オンキヨー株式会社
システム
15日前
個人
歩行者音声ガイドシステム
26日前
株式会社ヨコオ
検査治具
27日前
横河電機株式会社
光学プローブ
15日前
昭電工業株式会社
測定装置
28日前
株式会社豊田自動織機
無人走行体
1か月前
太陽誘電株式会社
検出装置
22日前
個人
回転動作検出システム
1日前
アズビル株式会社
流量センサ
今日
大和製衡株式会社
重量選別機
20日前
村田機械株式会社
変位検出装置
1か月前
トヨタ自動車株式会社
測定治具
1か月前
矢崎総業株式会社
センサ
22日前
キーコム株式会社
試験システム
1か月前
キーコム株式会社
試験システム
1か月前
株式会社ニシヤマ
物品取付装置
23日前
株式会社ニシヤマ
物品取付装置
23日前
株式会社東芝
センサ
7日前
株式会社ヨコオ
接続装置
今日
株式会社テイエルブイ
流量推定システム
1日前
TDK株式会社
磁気センサ
27日前
大同特殊鋼株式会社
形状検出装置
22日前
個人
氷河融雪水流出量の推定方法
14日前
三菱マテリアル株式会社
温度センサ
15日前
三菱マテリアル株式会社
温度センサ
23日前
トヨタ自動車株式会社
劣化推定装置
23日前
株式会社島津製作所
分析装置
22日前
トヨタ自動車株式会社
温度計測装置
2日前
株式会社ミツトヨ
光学式エンコーダ
28日前
三菱マテリアル株式会社
温度センサ
2日前
株式会社不二越
X線測定装置
1か月前
三晶エムイーシー株式会社
試料容器
8日前
ミツミ電機株式会社
測距装置
今日
オムロン株式会社
スイッチング装置
1か月前
トヨタ自動車株式会社
電気機器
26日前
日本メクトロン株式会社
部品実装基板
1か月前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ