TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024085101
公報種別
公開特許公報(A)
公開日
2024-06-26
出願番号
2022199447
出願日
2022-12-14
発明の名称
方位異常検知装置
出願人
株式会社豊田自動織機
代理人
個人
,
個人
,
個人
,
個人
主分類
G01C
21/28 20060101AFI20240619BHJP(測定;試験)
要約
【課題】位置変化センサを使用する際に、移動体の移動方位の異常を高精度に検知することができる方位異常検知装置を提供する。
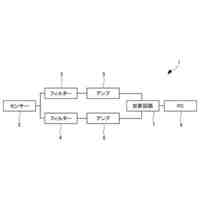
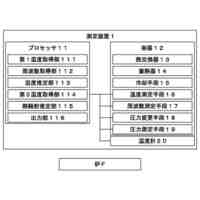
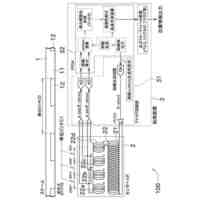
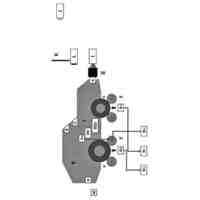
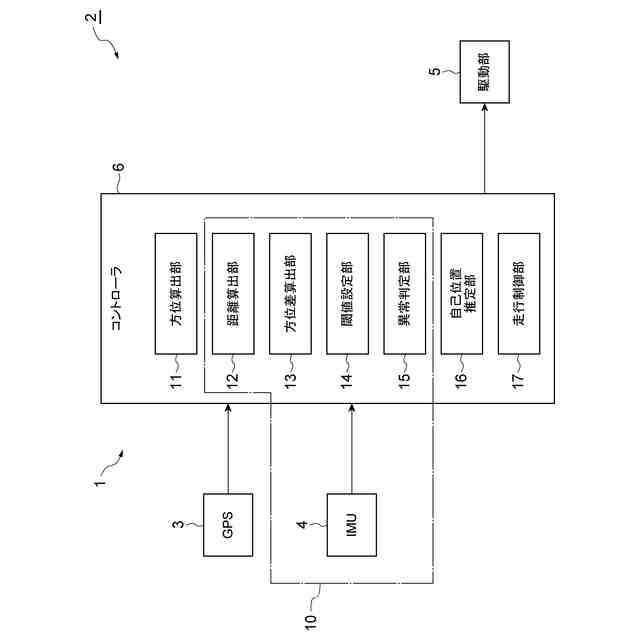
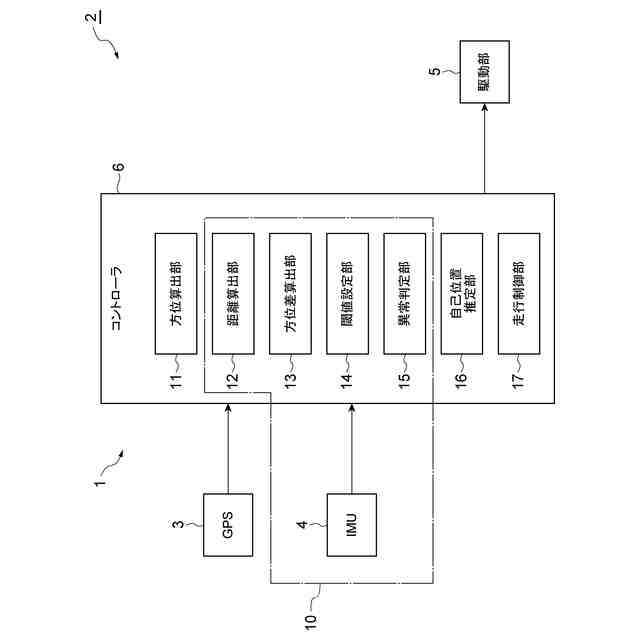
【解決手段】方位異常検知装置10は、GPS受信機3の検出信号に基づいて、車両2の移動距離Lを算出する距離算出部12と、車両2の移動方位Diを検出する慣性計測ユニット4と、GPS受信機3の検出信号に基づいて算出された車両2の移動方位Dpと慣性計測ユニット4により検出された車両2の移動方位Diとの差分を方位差として算出する方位差算出部13と、車両2の移動距離Lに応じて方位差が許容される範囲を変化させる方位差許容閾値を設定する閾値設定部14と、方位差算出部13により算出された方位差と閾値設定部14により設定された方位差許容閾値とを比較し、方位差が方位差許容閾値以上であるときに、移動方位Dpが異常であると判定する異常判定部15とを備える。
【選択図】図1
特許請求の範囲
【請求項1】
移動体の位置変化を検出する位置変化センサの検出信号に基づいて算出された前記移動体の移動方位が異常であるかどうかを検知する方位異常検知装置であって、
前記位置変化センサの検出信号に基づいて、前記移動体の移動距離を算出する距離算出部と、
前記移動体の移動方位を検出する方位センサと、
前記位置変化センサの検出信号に基づいて算出された前記移動体の移動方位である第1方位と前記方位センサにより検出された前記移動体の移動方位である第2方位との差分を方位差として算出する方位差算出部と、
前記距離算出部により算出された前記移動体の移動距離に応じて前記方位差が許容される範囲を変化させる方位差許容閾値を設定する閾値設定部と、
前記方位差算出部により算出された前記方位差と前記閾値設定部により設定された前記方位差許容閾値とを比較し、前記方位差が前記方位差許容閾値以上であるときに、前記第1方位が異常であると判定する異常判定部とを備える方位異常検知装置。
続きを表示(約 370 文字)
【請求項2】
前記閾値設定部は、前記距離算出部により算出された前記移動体の移動距離が短くなるに従って前記方位差許容閾値を大きくする請求項1記載の方位異常検知装置。
【請求項3】
前記閾値設定部は、前記移動体の移動距離と前記位置変化センサの距離誤差と前記移動体が単位距離だけ移動する間に許容可能な方位差とに基づいて、前記方位差許容閾値を設定する請求項2記載の方位異常検知装置。
【請求項4】
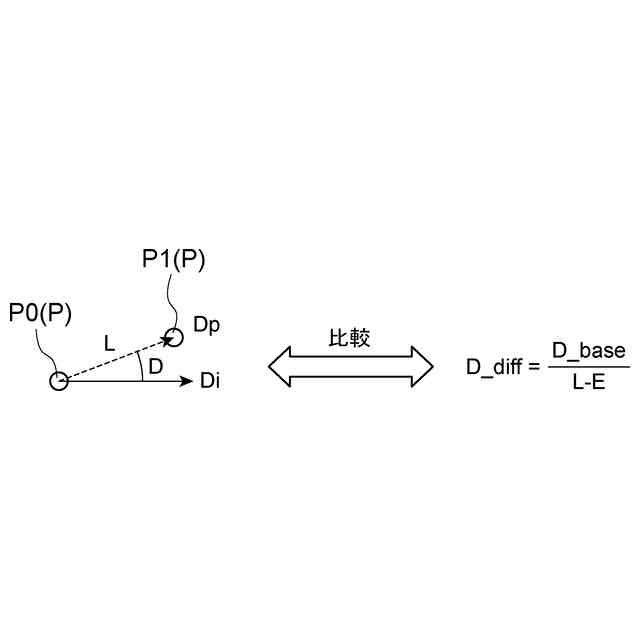
前記閾値設定部は、前記移動体の移動距離をLとし、前記位置変化センサの距離誤差をEとし、前記移動体が単位距離だけ移動する間に許容可能な方位差をD_baseとし、前記方位差許容閾値をD_diffとすると、D_diff=D_base/(L-E)により前記方位差許容閾値を算出する請求項3記載の方位異常検知装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、方位異常検知装置に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
従来の方位異常検知装置としては、例えば特許文献1に記載されている技術が知られている。特許文献1に記載の方位異常検知装置は、地磁気センサで検出したデータにより移動対象の移動方位変化Δθmを算出すると共に、加速度センサで検出した移動対象の加速度と距離センサで検出した移動対象の移動距離とに基づいて、移動対象の移動方位変化Δθaを算出し、移動方位変化Δθmと移動方位変化Δθaとの差に応じて地磁気センサの正常または異常を判定する。
【先行技術文献】
【特許文献】
【0003】
特開2009-288022号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
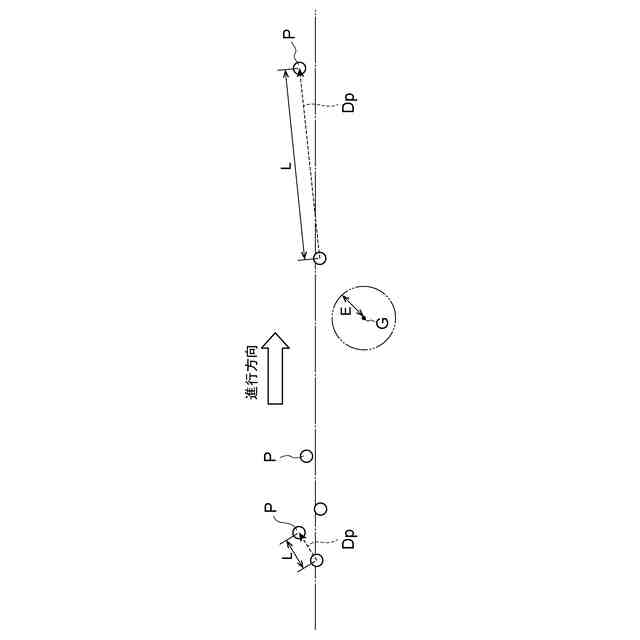
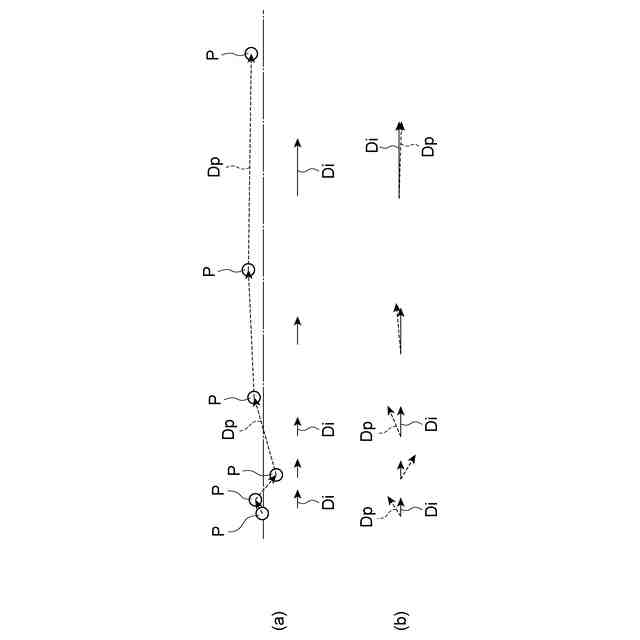
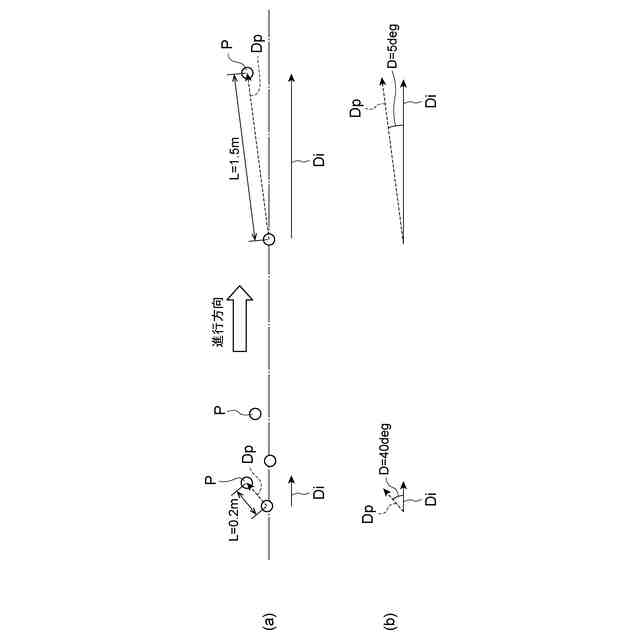
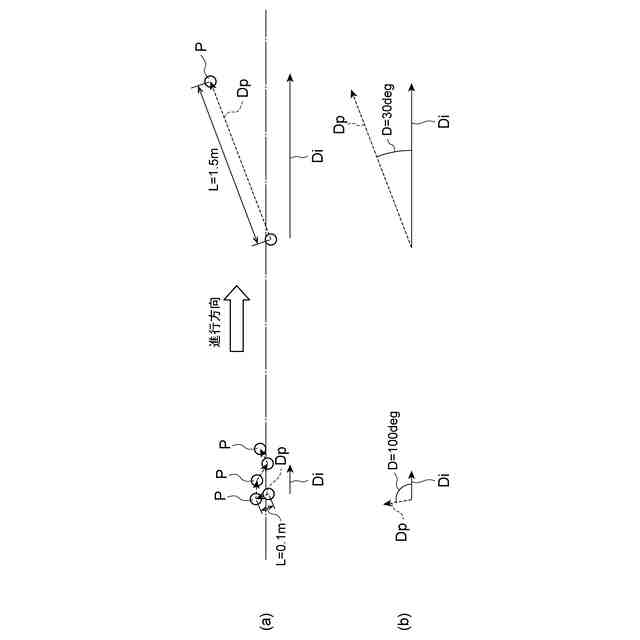
ところで、上記の地磁気センサによらず、GPS受信機等のように移動体の位置変化を検出する位置変化センサの計測値に基づいて、移動体の移動方位を算出する場合であっても、移動体の走行速度等の条件によって計測結果に誤差が生じるため、移動方位の異常判定を正しく行うことができない。例えば、GPS測位点から移動体の移動方位を算出する場合は、移動体が低速走行になるほどGPS測位点の軌跡のブレが大きくなるため、移動方位の異常であるのか単なるGPSの誤差であるのかを判定することができない。
【0005】
本発明の目的は、位置変化センサを使用する際に、移動体の移動方位の異常を高精度に検知することができる方位異常検知装置を提供することである。
【課題を解決するための手段】
【0006】
本発明の一態様は、移動体の位置変化を検出する位置変化センサの検出信号に基づいて算出された移動体の移動方位が異常であるかどうかを検知する方位異常検知装置であって、位置変化センサの検出信号に基づいて、移動体の移動距離を算出する距離算出部と、移動体の移動方位を検出する方位センサと、位置変化センサの検出信号に基づいて算出された移動体の移動方位である第1方位と方位センサにより検出された移動体の移動方位である第2方位との差分を方位差として算出する方位差算出部と、距離算出部により算出された移動体の移動距離に応じて方位差が許容される範囲を変化させる方位差許容閾値を設定する閾値設定部と、方位差算出部により算出された方位差と閾値設定部により設定された方位差許容閾値とを比較し、方位差が方位差許容閾値以上であるときに、第1方位が異常であると判定する異常判定部とを備える。
【0007】
このような方位異常検知装置においては、位置変化センサの検出信号に基づいて、移動体の移動距離が算出される。また、方位センサにより移動体の移動方位が検出される。そして、位置変化センサの検出信号に基づいて算出された移動体の移動方位(第1方位)と方位センサにより検出された移動体の移動方位(第2方位)との差分が方位差として算出される。また、移動体の移動距離に応じて方位差が許容される範囲を変化させる方位差許容閾値が設定される。そして、第1方位と第2方位との方位差と方位差許容閾値とが比較され、当該方位差が方位差許容閾値以上であるときに、第1方位が異常であると判定される。このように第1方位と第2方位との方位差と移動体の移動距離に応じて方位差が許容される範囲を変化させる方位差許容閾値とが比較されることで、位置変化センサの検出信号に基づいて算出された第1方位が異常であるかどうかが判定されることとなる。これにより、位置変化センサを使用する際に、移動体の移動方位の異常が高精度に検知される。
【0008】
閾値設定部は、距離算出部により算出された移動体の移動距離が短くなるに従って方位差許容閾値を大きくしてもよい。このような構成では、移動体が低速走行することで、移動体の移動距離が短くなると、方位差許容閾値が大きくなるため、第1方位が異常であると判定されにくくなる。従って、例えば位置変化センサとして低速時ほど誤差が生じやすいGPS受信機が使用される場合でも、移動体の移動方位の異常が確実に高精度に検知される。
【0009】
閾値設定部は、移動体の移動距離と位置変化センサの距離誤差と移動体が単位距離だけ移動する間に許容可能な方位差とに基づいて、方位差許容閾値を設定してもよい。このような構成では、位置変化センサが潜在的に持っている距離誤差と、移動体が単位距離だけ移動する間に許容可能となるように予め決められた方位差とを考慮して、方位差許容閾値が設定されることとなる。従って、移動体の移動方位の異常がより高精度に検知される。
【0010】
閾値設定部は、移動体の移動距離をLとし、位置変化センサの距離誤差をEとし、移動体が単位距離だけ移動する間に許容可能な方位差をD_baseとし、方位差許容閾値をD_diffとすると、D_diff=D_base/(L-E)により方位差許容閾値を算出してもよい。このような構成では、方位差許容閾値が単純な計算式を用いて容易に設定されるため、演算処理の簡素化を図ることができる。
【発明の効果】
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
オンキヨー株式会社
システム
11日前
株式会社ヨコオ
検査治具
23日前
横河電機株式会社
光学プローブ
11日前
個人
歩行者音声ガイドシステム
22日前
株式会社豊田自動織機
無人走行体
26日前
昭電工業株式会社
測定装置
24日前
太陽誘電株式会社
検出装置
18日前
大和製衡株式会社
重量選別機
16日前
トヨタ自動車株式会社
測定治具
26日前
村田機械株式会社
変位検出装置
26日前
矢崎総業株式会社
センサ
18日前
株式会社ニシヤマ
物品取付装置
19日前
株式会社東芝
センサ
3日前
キーコム株式会社
試験システム
29日前
キーコム株式会社
試験システム
29日前
株式会社ニシヤマ
物品取付装置
19日前
個人
氷河融雪水流出量の推定方法
10日前
大同特殊鋼株式会社
形状検出装置
18日前
TDK株式会社
磁気センサ
23日前
三晶エムイーシー株式会社
試料容器
4日前
株式会社ミツトヨ
光学式エンコーダ
24日前
三菱マテリアル株式会社
温度センサ
11日前
オムロン株式会社
スイッチング装置
29日前
トヨタ自動車株式会社
劣化推定装置
19日前
三菱マテリアル株式会社
温度センサ
19日前
株式会社不二越
X線測定装置
26日前
株式会社島津製作所
分析装置
18日前
日本メクトロン株式会社
部品実装基板
29日前
東海電子株式会社
アルコール測定装置
11日前
マレリ株式会社
推定装置
2日前
トヨタ自動車株式会社
空燃比算出装置
26日前
トヨタ自動車株式会社
電気機器
22日前
株式会社フジキン
濃度測定装置
23日前
株式会社ダイヘン
異常検出装置
16日前
日本特殊陶業株式会社
ガスセンサ
23日前
株式会社不二越
X線回折測定装置
26日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ