TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024080526
公報種別
公開特許公報(A)
公開日
2024-06-13
出願番号
2022193803
出願日
2022-12-02
発明の名称
モータ制御装置
出願人
国立大学法人群馬大学
,
サンデン株式会社
代理人
個人
主分類
H02P
21/14 20160101AFI20240606BHJP(電力の発電,変換,配電)
要約
【課題】ニューラルネットワークに基づいてモータの効率改善と動特性改善の双方を実現する場合に、それらを統一的に考慮した設計が可能であり、ネットワーク規模の小型化も実現することができるモータ制御装置を提供する。
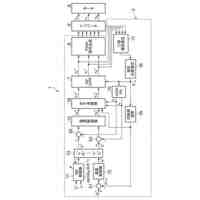
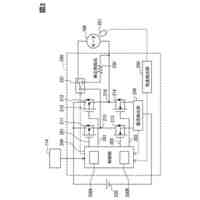
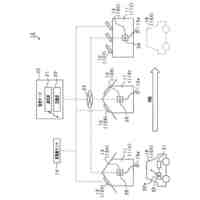
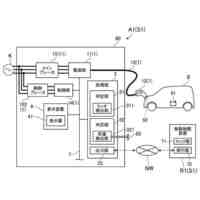
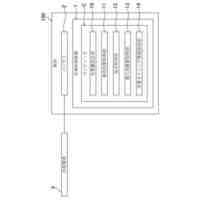
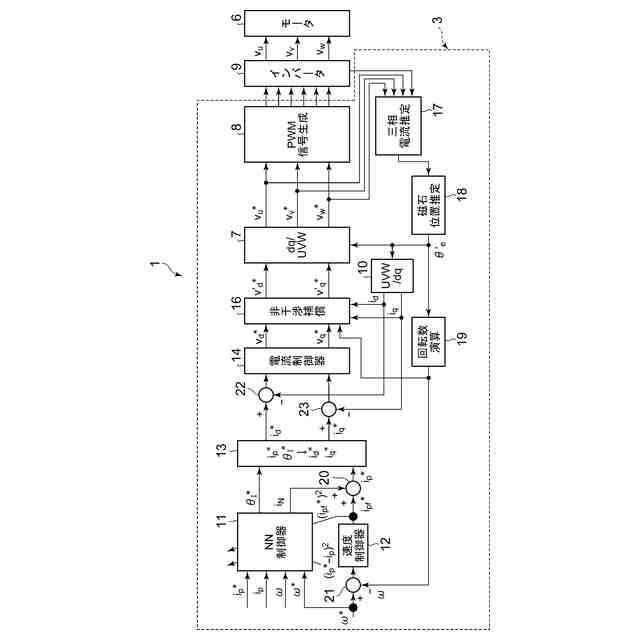
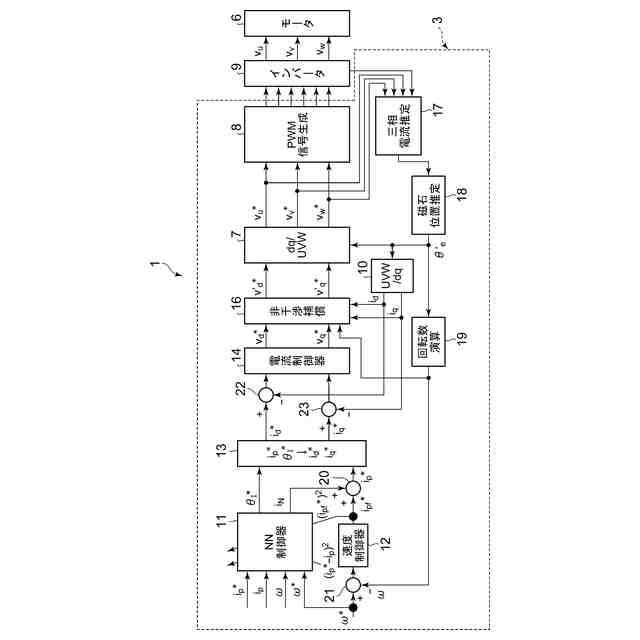
【解決手段】入力層、中間層及び出力層を有するニューラルネットワーク制御器11は、モータ6の電流値とモータ6の角速度値を入力信号として入力層より入力し、順伝搬と逆伝搬による学習を繰り返すことにより、モータ6の効率改善のための出力信号とモータ6の動特性改善のための出力信号を出力層より導出する。ニューラルネットワーク制御器11が導出した出力信号、又は、当該出力信号から得られる値に基づき、モータ6を制御する。
【選択図】図1
特許請求の範囲
【請求項1】
モータを制御する制御装置であって、
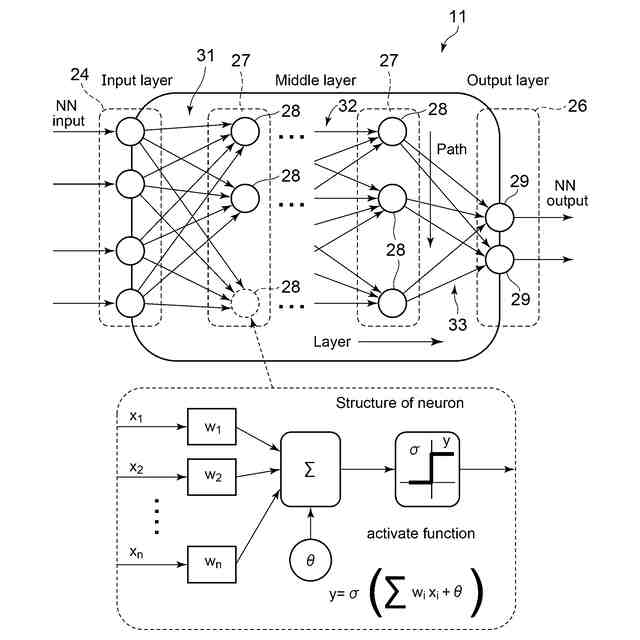
入力層、中間層及び出力層を有するニューラルネットワーク制御器を備え、
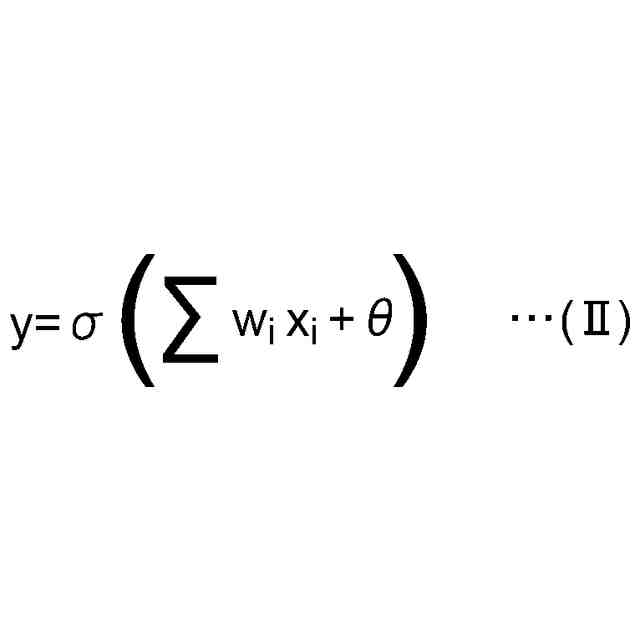
該ニューラルネットワーク制御器は、前記モータの電流値と前記モータの角速度値を入力信号として前記入力層より入力し、順伝搬と逆伝搬による学習を繰り返すことにより、前記モータの効率改善のための出力信号と前記モータの動特性改善のための出力信号を前記出力層より導出すると共に、
前記ニューラルネットワーク制御器が導出した前記出力信号、又は、当該出力信号から得られる値に基づき、前記モータを制御することを特徴とするモータ制御装置。
続きを表示(約 1,300 文字)
【請求項2】
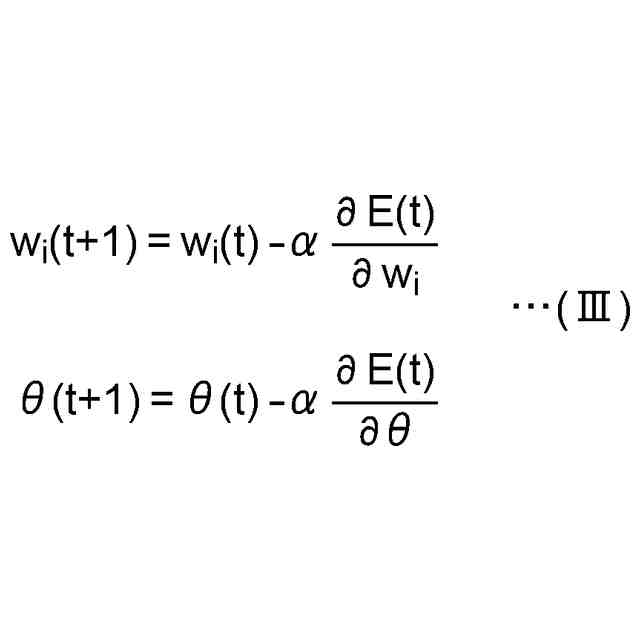
前記ニューラルネットワーク制御器は、前記各層の結合の重みであるシナプスを順伝搬と逆伝搬により更新することで、前記モータが最適な効率となる前記出力信号と、前記モータが最適な動特性となる前記出力信号を導出することを特徴とする請求項1に記載のモータ制御装置。
【請求項3】
前記ニューラルネットワーク制御器は、前記入力層と前記中間層のしきい値であるニューロンとを結合する前記シナプス、前記中間層の前記ニューロンと前記出力層のしきい値であるニューロンとを結合する前記シナプスを順伝搬と逆伝搬により更新することを特徴とする請求項2に記載のモータ制御装置。
【請求項4】
前記ニューラルネットワーク制御器は、前記入力層、中間層及び出力層を備えた単一構成のものであることを特徴とする請求項1に記載のモータ制御装置。
【請求項5】
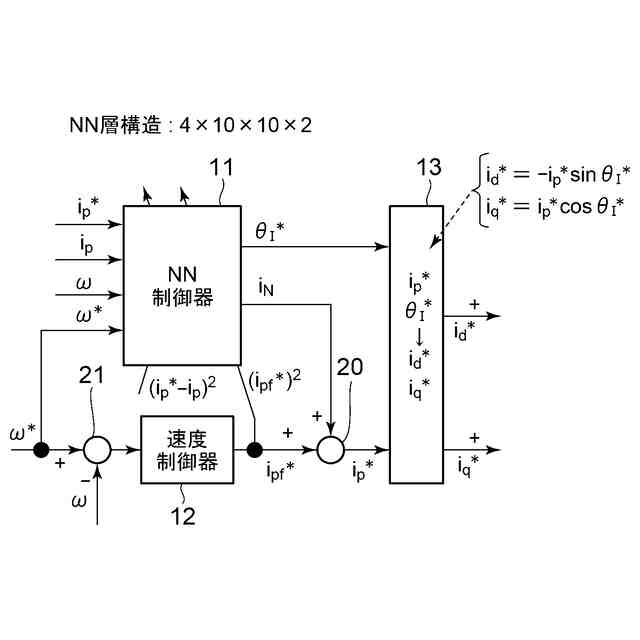
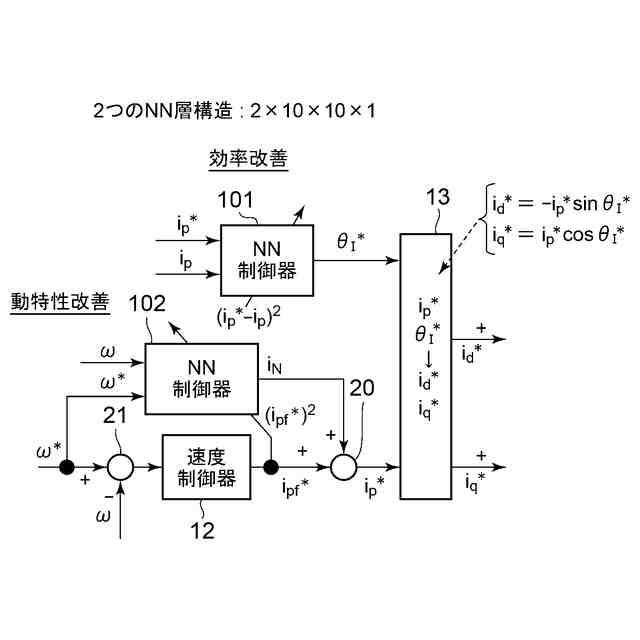
前記モータの電流値は電流波高指令値i
p
*
と電流波高値i
p
であり、
前記モータの角速度値は機械角速度指令値ω
*
と機械角速度推定値ωであり、
前記モータの効率改善のための出力信号は電流位相指令値θ
I
*
であり、
前記モータの動特性改善のための出力信号は補償電流値i
N
であり、
前記モータの機械角速度指令値ω
*
と機械角速度推定値ωの偏差が入力されるフィードバック系の速度制御器で算出されたフィードバック制御出力値i
pf
*
に、前記補償電流値i
N
を加算することで前記電流波高指令値i
p
*
を導出し、
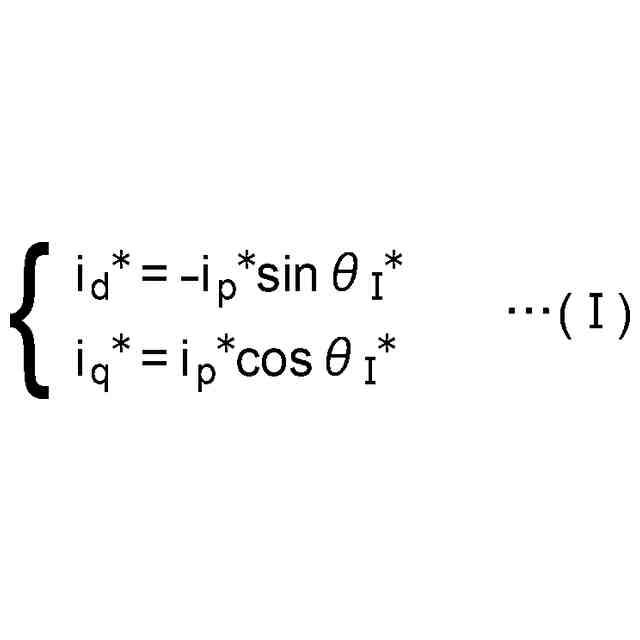
前記電流位相指令値θ
I
*
と前記電流波高指令値i
p
*
を極座標変換器に入力して、該極座標変換器によりd軸電流指令値i
d
*
とq軸電流指令値i
q
*
を導出することを特徴とする請求項1に記載のモータ制御装置。
【請求項6】
前記ニューラルネットワーク制御器は、前記電流波高指令値i
p
*
と前記電流波高値i
p
の二乗誤差(i
p
*
-i
p
)
2
、及び、前記フィードバック制御出力値i
pf
*
の二乗誤差(i
pf
*
)
2
を教師信号とし、各教師信号を最小化するように、前記入力信号から前記出力信号を学習的に導出することを特徴とする請求項5に記載のモータ制御装置。
【請求項7】
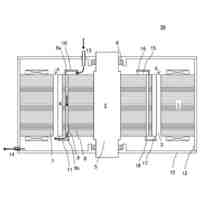
前記モータは、永久磁石同期電動機であり、
前記モータを駆動制御するモータ駆動部と、
前記ニューラルネットワーク制御器の前記出力信号、又は、当該出力信号から得られる値に基づいて前記モータ駆動部により前記モータを制御するモータ制御部と、
を備えたことを特徴とする請求項1乃至請求項6のうちの何れかに記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、モータの運転を制御するためのモータ制御装置に関するものである。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
永久磁石埋込型(IPM)モータ(永久磁石同期電動機)は、永久磁石を回転子内部に配置した構造で、リラクタンストルクを併用可能であり、高効率化を図りやすいため、家電機器や産業機器、自動車分野の用途などに広く用いられてきている。また、近年のAI技術の発展に伴い、この種モータ制御の分野においてもその導入が検討されて来ている。
【0003】
例えば、特許文献1では、モータの最適電流指令を学習することができる機械学習方法を提案していた。しかしながら、特許文献1は、モータトルク、モータ電流、モータ電圧を報酬とした学習によりモータの電流指令値を導出し、モータ電圧を考慮した電流指令テーブルの学習によるトルク出力の改善を主目的としていたため、モータの最適効率化が目的ではなく、また、モータの製品ばらつきや経年変化に対するパラメータ変動に対して損失を最小化し、効率の劣化を防止することができない。更に、制御パラメータの適合にも時間を要するという問題があった。
【0004】
そこで、特許文献2では、多層ニューラルネットワーク補償器を用いてモータの最適効率化を図る提案が行われた。特許文献2は、フィードバック制御系に対して、別途ニューラルネットワーク補償器を設け、学習と共に損失(銅損)を最小化する電流位相を導出することで、モータの効率改善を可能としていたが、フィードバック制御系の速度制御器で設計した性能以上にモータの動特性(回転数応答性)を改善することが不可能であった。
【先行技術文献】
【特許文献】
【0005】
特許第650621982号公報
特開2022-2042871号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
そこで、モータの動特性を改善するニューラルネットワーク補償器を別途設けることが考えられるが、その場合には、入力層と中間層、出力層を有した効率改善のためのニューラルネットワーク補償器と、同じく入力層と中間層、出力層を有した動特性改善のためのニューラルネットワーク補償器を個別に設計し、システムに同時に導入する必要があり、システムの安定性やそれぞれの改善が想定通り達成されるかが不明である。特に、ニューラルネットワーク補償器を二つ用いることで、効率改善のみの場合に比して、ニューロン(しきい値)やシナプス(各層の結合の重み)の数も二倍となり、大きな計算リソースを有する演算装置が必要となるという問題があった。
【0007】
本発明は、係る従来の技術的課題を解決するために成されたものであり、ニューラルネットワークに基づいてモータの効率改善と動特性改善の双方を実現する場合に、それらを統一的に考慮した設計が可能であり、ネットワーク規模の小型化も実現することができるモータ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0008】
本発明のモータ制御装置は、モータを制御するものであって、入力層、中間層及び出力層を有するニューラルネットワーク制御器を備え、このニューラルネットワーク制御器は、モータの電流値とモータの角速度値を入力信号として入力層より入力し、順伝搬と逆伝搬による学習を繰り返すことにより、モータの効率改善のための出力信号とモータの動特性改善のための出力信号を出力層より導出すると共に、ニューラルネットワーク制御器が導出した出力信号、又は、当該出力信号から得られる値に基づき、モータを制御することを特徴とする。
【0009】
請求項2の発明のモータ制御装置は、上記発明においてニューラルネットワーク制御器は、各層の結合の重みであるシナプスを順伝搬と逆伝搬により更新することで、モータが最適な効率となる出力信号と、モータが最適な動特性となる出力信号を導出することを特徴とする。
【0010】
請求項3の発明のモータ制御装置は、上記発明においてニューラルネットワーク制御器は、入力層と中間層のしきい値であるニューロンとを結合するシナプス、中間層のニューロンと出力層のしきい値であるニューロンとを結合するシナプスを順伝搬と逆伝搬により更新することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人群馬大学
モータ制御装置
25日前
国立大学法人群馬大学
糖リン脂質の製造方法
5日前
国立大学法人群馬大学
廃棄物を利用した生分解性樹脂の海洋生分解速度制御方法
12日前
学校法人自治医科大学
血管平滑筋細胞指向カプシド、アデノ随伴ウイルスベクター、医薬組成物、治療方法、核酸導入方法、及びカプシド製造方法
12日前
株式会社東光高岳
開閉装置
11日前
住友ベークライト株式会社
ロータ
5日前
富士電機株式会社
電源装置
5日前
スワン電器株式会社
電源装置
5日前
富士電機株式会社
電力変換装置
5日前
東洋電装株式会社
駆動制御装置
5日前
株式会社アイシン
巻線界磁型回転電機
5日前
富士電機株式会社
電力変換装置
12日前
株式会社ダイヘン
電圧調整装置
5日前
株式会社デンソートリム
モータ制御装置
6日前
株式会社日立製作所
回転電機
6日前
ニチコン株式会社
スイッチングレギュレータ
11日前
株式会社アイシン
車載充電装置
5日前
株式会社アイシン
車載充電装置
5日前
株式会社 東京ウエルズ
駆動装置
12日前
日産自動車株式会社
回転電機用ステータ
6日前
トヨタホーム株式会社
電力融通システム
5日前
大阪瓦斯株式会社
電力供給システム
11日前
オムロン株式会社
ドライバ
11日前
株式会社ダイヘン
充電装置および充電設備
12日前
株式会社豊田自動織機
回転電機のステータ
5日前
株式会社ダイヘン
充電装置および充電設備
12日前
株式会社豊田自動織機
回転電機のステータ
5日前
本田技研工業株式会社
回転電機用ステータ
5日前
ローム株式会社
モータドライバ
12日前
株式会社ダイヘン
給電システム及び受電装置
11日前
河村電器産業株式会社
電気機器収納箱
12日前
ホシデン株式会社
車載用非接触給電装置
12日前
矢崎総業株式会社
給電装置
12日前
本田技研工業株式会社
充電制御装置及び充電制御方法
12日前
矢崎総業株式会社
配索構造
6日前
富士電機株式会社
電力変換装置及びその制御方法
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ