TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025007572
公報種別
公開特許公報(A)
公開日
2025-01-17
出願番号
2023109060
出願日
2023-07-03
発明の名称
モータ制御装置
出願人
国立大学法人群馬大学
,
サンデン株式会社
代理人
個人
主分類
H02P
21/22 20160101AFI20250109BHJP(電力の発電,変換,配電)
要約
【課題】ニューラルネットワーク構造により、直接的に最適効率となる出力信号を学習的に導出する場合に、物理的な制約を学習アルゴリズムに組み込むことで、リアルタイムでより最適な効率改善を図ることができるモータ制御装置を提供する。
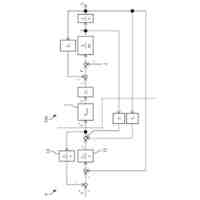
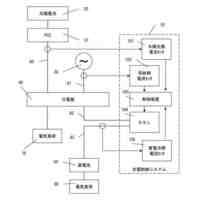
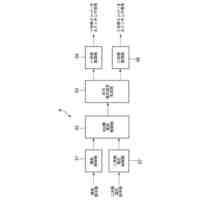
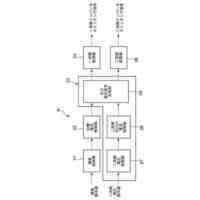
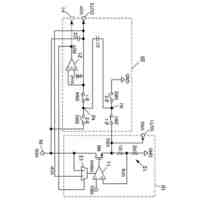
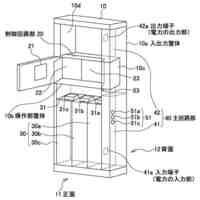
【解決手段】モータ制御装置1は、モータ6を制御するものであって、入力信号を入力し、順伝搬と逆伝搬による学習を繰り返すことにより、最適効率となる出力信号を導出するニューラルネットワーク補償器11を備え、入力信号を電流波高指令値i
p
*
と電流波高値i
p
とし、出力信号を電流位相指令値θ
i
*
とし、傾きΔi
p
/Δθ
i
*
に基づく値を教師信号として教師信号を最小化するように入力信号から出力信号を学習的に導出する。
【選択図】図1
特許請求の範囲
【請求項1】
入力信号を入力し、順伝搬と逆伝搬による学習を繰り返すことにより、モータの効率改善のための出力信号を導出するニューラルネットワーク補償器を備え、該ニューラルネットワーク補償器が導出した前記出力信号に基づき、前記モータを制御するモータ制御装置において、
前記ニューラルネットワーク補償器は、
前記入力信号を、電流波高指令値i
p
*
と電流波高値i
p
とし、
前記出力信号を、電流位相指令値θ
i
*
とすると共に、
傾きΔi
p
/Δθ
i
*
に基づく値を教師信号として、当該教師信号を最小化するように、前記入力信号から前記出力信号を学習的に導出することを特徴とするモータ制御装置。
続きを表示(約 600 文字)
【請求項2】
前記傾きΔi
p
/Δθ
i
*
に基づく値である符号関数sgn(Δi
p
/Δθ
i
*
)を前記ニューラルネットワーク補償器の教師信号とすることを特徴とする請求項1に記載のモータ制御装置。
【請求項3】
前記ニューラルネットワーク補償器は、前記入力信号として機械角速度指令値ω
*
と機械角速度推定値ωを更に入力し、前記モータの動特性改善のための補償電流値i
N
を前記出力信号として更に導出することを特徴とする請求項1に記載のモータ制御装置。
【請求項4】
前記ニューラルネットワーク補償器は、入力層、中間層及び出力層を備えた単一構成のものであることを特徴とする請求項3に記載のモータ制御装置。
【請求項5】
前記モータは、永久磁石同期電動機であることを特徴とする請求項1乃至請求項4のうちの何れかに記載のモータ制御装置。
【請求項6】
前記モータを駆動制御するモータ駆動部と、
前記ニューラルネットワーク補償器の前記出力信号に基づいて前記モータ駆動部により前記モータを制御するモータ制御部と、
を備えたことを特徴とする請求項1乃至請求項4のうちの何れかに記載のモータ制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、ニューラルネットワーク制御を利用してモータの運転を制御するモータ制御装置に関するものである。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
永久磁石埋込型(IPM)モータ(永久磁石同期電動機)は、永久磁石を回転子内部に配置した構造で、リラクタンストルクを併用可能であり、高効率化を図りやすいため、家電機器や産業機器、自動車分野の用途などに広く用いられてきている。また、近年のAI技術の発展に伴い、この種モータ制御の分野においてもその導入が検討されて来ている。
【0003】
例えば、特許文献1ではモータの電流制御系において,ステップ状のトルク指令に対する電流のオーバーシュート量、アンダーシュート量、立ち上がり時間を報酬とした学習により、電流制御器のPIゲインを最適化する学習装置と学習方法を提案している。また、例えば、特許文献2ではモータの最適電流指令を学習することができる機械学習方法を提案している。この文献では、モータトルク、モータ電流、モータ電圧を報酬とした学習により、モータの電流指令値を導出している。
【0004】
更に、例えば、特許文献3ではニューラルネットワーク手段を用いて、1次電圧と位相角を導出し、誘導機を制御する装置が提案されている。しかしながら、何れの文献に記載の構成によっても、モータの製品ばらつきや経年変化によるモータパラメータの変動に対して、応答性良く損失を最小化し、効率の低下を防止することは難しいという問題があった。
【0005】
そこで、例えば特許文献4では、ニューラルネットワーク制御により、リアルタイムで最適効率となる出力信号を学習的に導出し、モータの総合効率(機械出力/電源入力)が最適になるように補償を行うモータ制御装置を提案していた。
【先行技術文献】
【特許文献】
【0006】
特開2017-34844号公報
特開2018-14838号公報
特許第3054521号公報
特開2022-42871号公報
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかしながら、従来のニューラルネットワーク制御による補償では、学習方法が場当たり的にデータを与えて学習させるものであったため、制御装置と外部環境要因に応じた最適値からずれてしまう。即ち、モータの製造バラツキや経年変化等でパラメータが変化してしまった場合、損失が最小となるような運転点で動作できず、総合効率(機械出力/電源入力)が低下してしまう。
【0008】
また、安価でバラツキの大きな部品を採用した場合も、損失が最小となるような運転点で動作できず、やはり総合効率が低下してしまう。それにより、電流が増加して熱が増えるため、素子の寿命が低下する。また、インバータの故障を防ぐために運転時間が短くなる問題があった。
【0009】
本発明は、係る従来の技術的課題を解決するために成されたものであり、ニューラルネットワーク構造により、直接的に最適効率となる出力信号を学習的に導出する場合に、物理的な制約を学習アルゴリズムに組み込むことで、リアルタイムでより最適な効率改善を図ることができるモータ制御装置を提供することを目的とする。
【課題を解決するための手段】
【0010】
本発明のモータ制御装置は、入力信号を入力し、順伝搬と逆伝搬による学習を繰り返すことにより、モータの効率改善のための出力信号を導出するニューラルネットワーク補償器を備え、このニューラルネットワーク補償器が導出した出力信号に基づき、モータを制御するものであって、ニューラルネットワーク補償器は、入力信号を、電流波高指令値i
p
*
と電流波高値i
p
とし、出力信号を、電流位相指令値θ
i
*
とすると共に、傾きΔi
p
/Δθ
i
*
に基づく値を教師信号として、当該教師信号を最小化するように、入力信号から出力信号を学習的に導出することを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人群馬大学
糖リン脂質の製造方法
6か月前
国立大学法人群馬大学
炭素触媒、電極及び電池
2か月前
国立大学法人群馬大学
塩応答性材料およびその使用
20日前
国立大学法人群馬大学
磁気浮上装置の制御システム
1か月前
日本農薬株式会社
抗真菌薬点眼剤
3か月前
国立大学法人群馬大学
生分解性樹脂の海洋生分解速度制御方法
26日前
国立大学法人群馬大学
めっき成形体及びめっき成形体の製造方法
3か月前
群馬県
三面型振動試験用治具
3日前
国立大学法人群馬大学
部材のリサイクル方法及びリサイクル接合部材の製造方法
5か月前
国立大学法人群馬大学
発泡剤シート及びその製造方法並びに発泡金属の製造方法
5か月前
株式会社SUBARU
評価方法、情報処理装置及び評価システム
20日前
サンデン・リテールシステム株式会社
ヒトの培養細胞の冷蔵保存方法
6か月前
福助工業株式会社
複合粉末の製造方法及び生分解性樹脂組成物の製造方法
12日前
株式会社Laboko
微細構造体デバイス製造システム及び微細構造体デバイス製造方法
2か月前
個人
充電制御システム
11日前
ニデック株式会社
モータ
25日前
個人
発電装置
19日前
個人
電流制御形AC-DC電源
18日前
株式会社ナユタ
電源装置
11日前
キヤノン株式会社
電源装置
19日前
個人
ステッピングモータ実習装置
1か月前
スズキ株式会社
移動システム
11日前
サンデン株式会社
電力変換装置
26日前
サンデン株式会社
電力変換装置
26日前
カヤバ株式会社
モータ制御装置
14日前
トヨタ自動車株式会社
充電方法
1か月前
カヤバ株式会社
モータ制御装置
14日前
トヨタ自動車株式会社
駆動装置
21日前
富士電機株式会社
整流装置
4日前
ダイハツ工業株式会社
グロメット
10日前
個人
回転力発生装置
17日前
株式会社ダイヘン
給電装置
12日前
日産自動車株式会社
回転電機
21日前
トヨタ自動車株式会社
電池システム
24日前
ミツミ電機株式会社
電源回路
20日前
新電元工業株式会社
充電装置
1か月前
続きを見る
他の特許を見る








 特許ウォッチ
特許ウォッチ