TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024076958
公報種別
公開特許公報(A)
公開日
2024-06-06
出願番号
2023170734
出願日
2023-09-29
発明の名称
手術支援システム、手術支援ロボット、手術支援システムの制御方法およびロボットシステム
出願人
川崎重工業株式会社
,
株式会社メディカロイド
代理人
個人
,
個人
主分類
A61B
34/35 20160101AFI20240530BHJP(医学または獣医学;衛生学)
要約
【課題】ロボットの駆動量にエラーが発生している場合に、ロボットのエラーからの復帰の可否を作業者が容易に判断することが可能な手術支援システムを提供する。
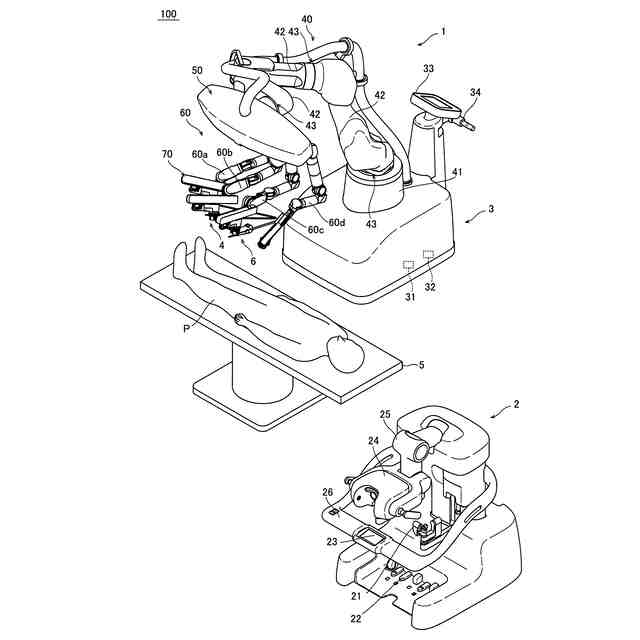
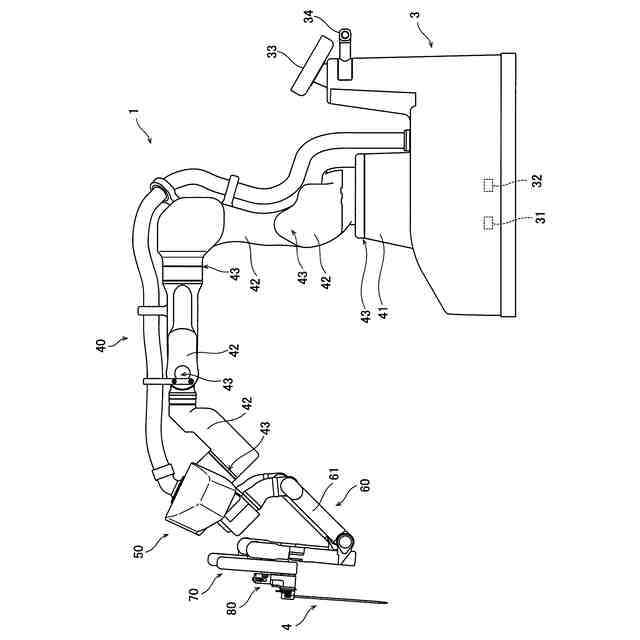
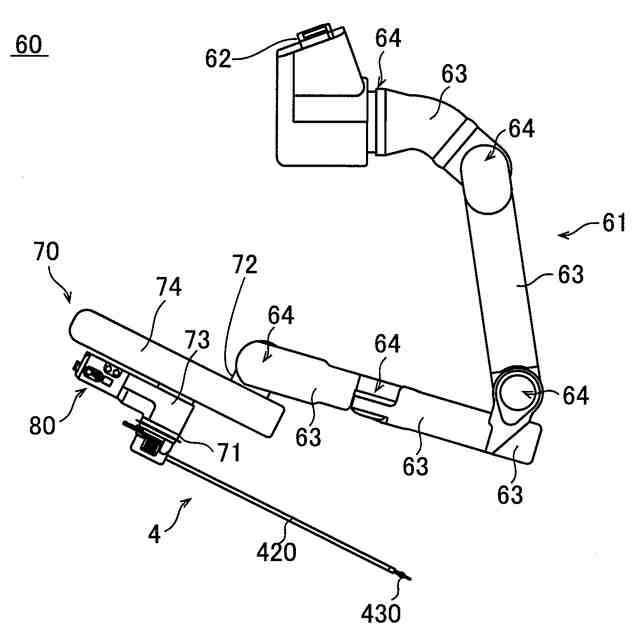
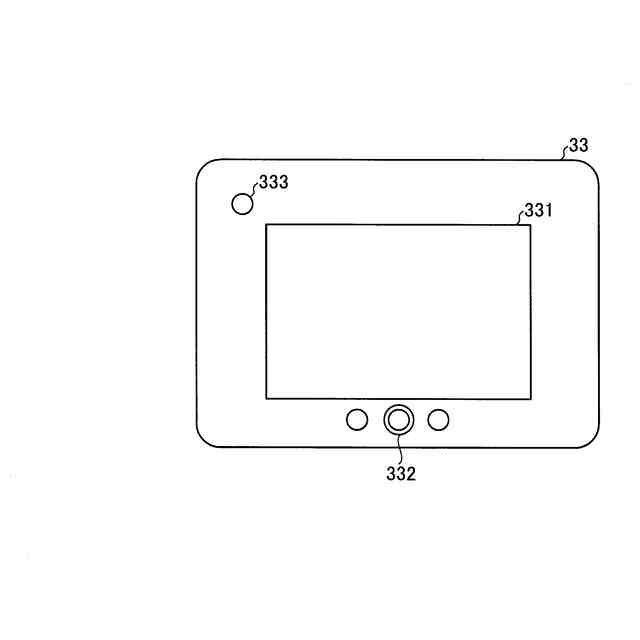
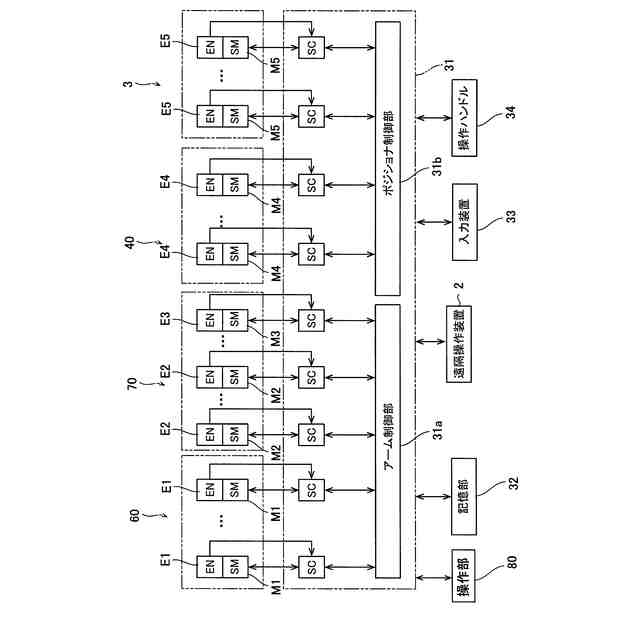
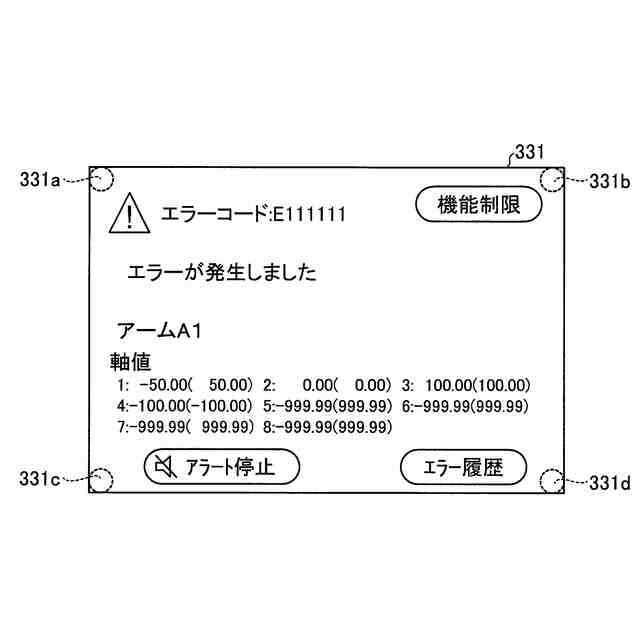
【解決手段】手術支援システム100は、複数の関節部64と、複数の関節部64の各々に設けられ、駆動軸の駆動量を示す軸値を検出するためのエンコーダE1とを含み、手術器具4を移動させるアーム60と、制御部31と、タッチパネル331と、を備える。制御部31は、エンコーダE1の検出に基づく関節部64の現在の軸値と、ロボットを停止させた時点のエンコーダE1の検出に基づく関節部64の過去の軸値、または、ロボットを駆動させるための指令値と、の差がしきい値よりも大きい場合に、エラーを通知するとともに、関節部64の現在の軸値と、関節部64の現在の軸値と比較可能な比較値とを、タッチパネル331に表示させる。
【選択図】図6
特許請求の範囲
【請求項1】
複数の駆動軸と、前記複数の駆動軸の各々に設けられ、前記駆動軸の駆動量を示す軸値を検出するためのエンコーダとを含み、手術器具を移動させるロボットと、
制御装置と、
第1表示部と、を備え、
前記制御装置は、前記エンコーダの検出に基づく前記駆動軸の現在の軸値と、前記ロボットを停止させた時点の前記エンコーダの検出に基づく前記駆動軸の過去の軸値、または、前記ロボットを駆動させるための指令値と、の差がしきい値よりも大きい場合に、エラーを通知するとともに、前記駆動軸の現在の軸値と、前記駆動軸の現在の軸値と比較可能な比較値とを、前記第1表示部に表示させる、手術支援システム。
続きを表示(約 1,400 文字)
【請求項2】
前記制御装置は、前記駆動軸の過去の軸値、前記駆動軸の過去の軸値および現在の軸値の差分値、前記指令値、前記指令値および現在の軸値の差分値、および、前記所定の基準値のうち少なくとも1つに基づく値を、前記比較値として、前記第1表示部に表示させる、請求項1に記載の手術支援システム。
【請求項3】
前記制御装置は、前記ロボットのシャットダウンまたは駆動を中断させた第1時点における前記駆動軸の過去の軸値と、前記第1時点より後で前記ロボットを起動または駆動を再開した第2時点における前記駆動軸の現在の軸値と、の差が前記しきい値よりも大きい場合に、前記エラーを通知するとともに、前記第2時点における前記駆動軸の現在の軸値と、前記第1時点における前記駆動軸の過去の軸値、および、前記所定の基準値のうち少なくとも1つに基づく前記比較値とを、前記第1表示部に表示させる、請求項1に記載の手術支援システム。
【請求項4】
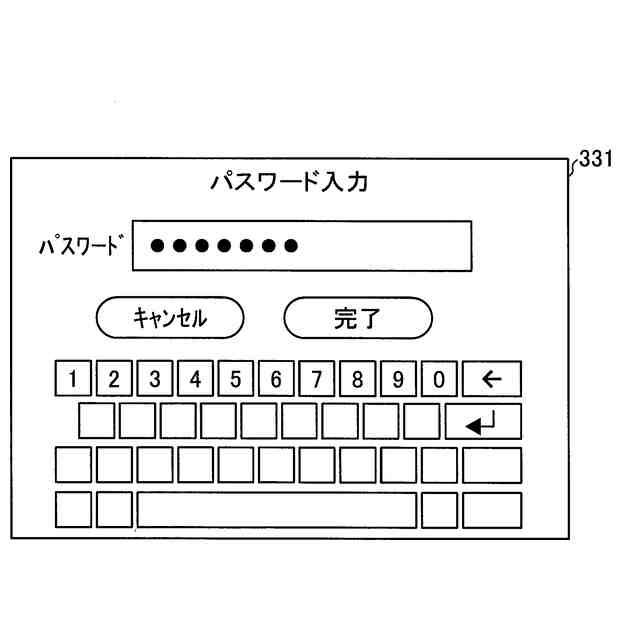
前記制御装置は、前記第1表示部に前記エラーを表示するとともに、前記エラーの解除操作を、前記第1表示部に対する操作により受け付ける、請求項1に記載の手術支援システム。
【請求項5】
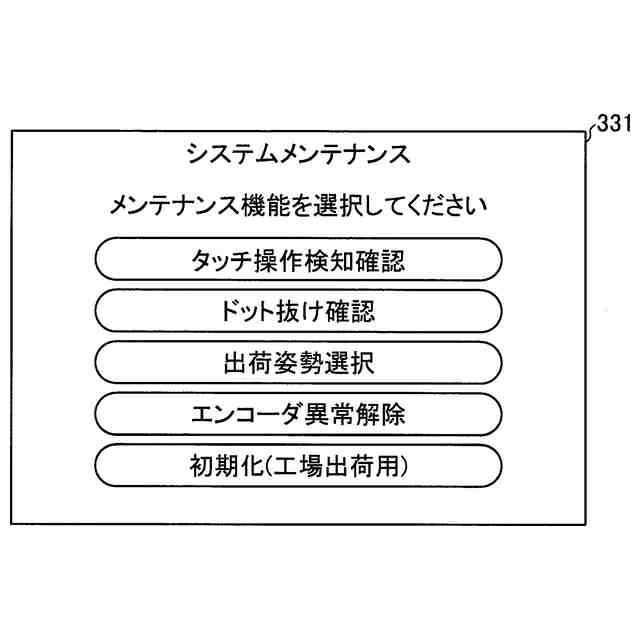
前記制御装置は、前記第1表示部に対する操作に基づいて、前記エラーの解除操作を行う解除モードに移行する制御を行う、請求項4に記載の手術支援システム。
【請求項6】
前記制御装置は、前記第1表示部に対する前記エラーの解除操作の後、前記第1表示部とは別個に設けられた解除ボタンの操作を受け付けて、前記エラーを解除する、請求項4に記載の手術支援システム。
【請求項7】
前記ロボットは、複数のロボットアームを含み、
前記制御装置は、前記複数のロボットアーム毎に、前記駆動軸の現在の軸値と、前記駆動軸の過去の軸値、または、前記指令値と、の差が前記しきい値より大きいか否かを判断するとともに、前記複数のロボットアーム毎に、前記エラーを通知する、請求項1に記載の手術支援システム。
【請求項8】
前記手術器具を移動させるための操作を受け付ける操作部と、第2表示部と、を含む、操作者装置を備え、
前記制御装置は、前記エラーを、前記第1表示部および前記第2表示部の両方に表示させるとともに、前記駆動軸の現在の軸値と、前記比較値とを、前記第2表示部に表示させずに、前記第1表示部に表示させる、請求項1に記載の手術支援システム。
【請求項9】
前記制御装置は、前記駆動軸の現在の前記エンコーダの検出値と、前記駆動軸の過去の前記エンコーダの検出値との差が所定の値以上で、かつ、前記エンコーダに特定の不具合が発生している場合に、エラーを通知するとともに、前記駆動軸の現在の軸値と、前記駆動軸の現在の軸値と比較可能な比較値とを、前記第1表示部に表示させる、請求項1に記載の手術支援システム。
【請求項10】
前記制御装置は、前記駆動軸の現在の前記エンコーダの検出値と、前記駆動軸の過去の前記エンコーダの検出値との差が1回転以上の所定の値以上で、かつ、前記エンコーダの回転した数の情報である回転データがメモリから失われる不具合が発生している場合に、エラーを通知するとともに、前記駆動軸の現在の軸値と、前記駆動軸の現在の軸値と比較可能な比較値とを、前記第1表示部に表示させる、請求項9に記載の手術支援システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、手術支援システム、手術支援ロボット、手術支援システムの制御方法およびロボットシステムに関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
従来、手術支援システムが知られている。たとえば、特許文献1には、複数の駆動軸を含み手術器具を移動させるロボットと、ロボットの駆動を制御する制御部とを備える手術支援システムが開示されている。この手術支援システムでは、制御部は、停止時の駆動部の回動位置と、停止後の再開時の駆動部の回動位置とを比較して、その差が許容差以内であれば、駆動を再開し、差が許容差よりも大きければ、駆動を再開させない制御を行う。
【先行技術文献】
【特許文献】
【0003】
特表2017-513551号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1の手術支援システムでは、制御部は、停止時の駆動部の回動位置と、停止後の再開時の駆動部の回動位置とを比較して、その差が許容差以内であれば、駆動を再開し、差が許容差よりも大きければ、駆動を再開させない制御を行う。このため、停止時の駆動部の回動位置と、停止後の再開時の駆動部の回動位置とに許容差より大きい差がありエラーが発生している場合に、どの程度の差が生じているかを作業者が確認することができないため、ロボットのエラーからの復帰の可否を作業者が判断することが困難である。
【0005】
本開示は、上記のような課題を解決するためになされたものであり、ロボットの駆動量にエラーが発生している場合に、ロボットのエラーからの復帰の可否を作業者が容易に判断することが可能な手術支援システム、手術支援ロボットおよび手術支援システムの制御方法を提供することである。
【課題を解決するための手段】
【0006】
上記目的を達成するために、本開示の第1の局面による手術支援システムは、複数の駆動軸と、複数の駆動軸の各々に設けられ、駆動軸の駆動量を示す軸値を検出するためのエンコーダとを含み、手術器具を移動させるロボットと、制御装置と、第1表示部と、を備え、制御装置は、エンコーダの検出に基づく駆動軸の現在の軸値と、ロボットを停止させた時点のエンコーダの検出に基づく駆動軸の過去の軸値、または、ロボットを駆動させるための指令値と、の差がしきい値よりも大きい場合に、エラーを通知するとともに、駆動軸の現在の軸値と、駆動軸の現在の軸値と比較可能な比較値とを、第1表示部に表示させる。
【0007】
本開示の第1の局面による手術支援システムでは、上記のように、制御装置は、エンコーダの検出に基づく駆動軸の駆動量を示す現在の軸値と、ロボットを停止させた時点のエンコーダの検出に基づく駆動軸の過去の軸値、または、ロボットを駆動させるための指令値と、の差がしきい値よりも大きい場合に、エラーを通知するとともに、駆動軸の現在の軸値と、駆動軸の現在の軸値と比較可能な比較値とを、第1表示部に表示させる。これにより、駆動軸の現在の軸値と、駆動軸の過去の軸値または指令値との差がしきい値よりも大きくエラーが生じた場合に、駆動軸の現在の軸値と、駆動軸の現在の軸値と比較可能な比較値とが第1表示部に表示されるので、駆動軸の過去の軸値または指令値に対して、駆動軸の現在の軸値がどの程度の差があるのかを作業者が容易に確認することができる。その結果、ロボットの駆動量にエラーが発生している場合に、ロボットのエラーからの復帰の可否を作業者が容易に判断することができる。
【0008】
本開示の第2の局面による手術支援ロボットは、複数の駆動軸と、複数の駆動軸の各々に設けられ、駆動軸の駆動量を示す軸値を検出するためのエンコーダとを含み、手術器具を移動させるロボット本体と、制御部と、表示部と、を備え、制御部は、エンコーダの検出に基づく駆動軸の現在の軸値と、ロボット本体を停止させた時点のエンコーダの検出に基づく駆動軸の過去の軸値、または、ロボット本体を駆動させるための指令値と、の差がしきい値よりも大きい場合に、エラーを通知するとともに、駆動軸の現在の軸値と、駆動軸の現在の軸値と比較可能な比較値とを、表示部に表示させる。
【0009】
本開示の第2の局面による手術支援ロボットでは、上記のように、制御部は、エンコーダの検出に基づく駆動軸の駆動量を示す現在の軸値と、ロボット本体を停止させた時点のエンコーダの検出に基づく駆動軸の過去の軸値、または、ロボット本体を駆動させるための指令値と、の差がしきい値よりも大きい場合に、エラーを通知するとともに、駆動軸の現在の軸値と、駆動軸の現在の軸値と比較可能な比較値とを、第1表示部に表示させる。これにより、駆動軸の現在の軸値と、駆動軸の過去の軸値または指令値との差がしきい値よりも大きくエラーが生じた場合に、駆動軸の現在の軸値と、駆動軸の現在の軸値と比較可能な比較値とが第1表示部に表示されるので、駆動軸の過去の軸値または指令値に対して、駆動軸の現在の軸値がどの程度の差があるのかを作業者が容易に確認することができる。その結果、ロボットの駆動量にエラーが発生している場合に、ロボットのエラーからの復帰の可否を作業者が容易に判断することが可能な手術支援ロボットを提供することができる。
【0010】
本開示の第3の局面による手術支援システムの制御方法は、複数の駆動軸と、複数の駆動軸の各々に設けられ、駆動軸の駆動量を示す軸値を検出するためのエンコーダとを含み、手術器具を移動させるロボットにおいて、エンコーダの検出に基づく駆動軸の現在の軸値と、ロボットを停止させた時点のエンコーダの検出に基づく駆動軸の過去の軸値、または、ロボットを駆動させるための指令値と、の差がしきい値よりも大きい場合に、エラーを通知し、駆動軸の現在の軸値と、駆動軸の現在の軸値と比較可能な比較値とを、表示部に表示する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
錠剤撒き器
24日前
個人
穿刺補助具
2か月前
個人
男性用下着
2か月前
個人
蓋付きしびん
4か月前
個人
聴診器
4か月前
個人
入れ歯
4か月前
個人
介護浴槽
4か月前
株式会社コロナ
脱臭機
21日前
個人
鼻腔拡張具
1か月前
個人
挟圧手工爪矯正具
25日前
個人
排便漏れ予防装具
2か月前
個人
入浴介護補助装置
4か月前
個人
鼻腔拡張具
6か月前
個人
座椅子脱着式車椅子
4か月前
株式会社東亜産業
温熱具
6か月前
個人
口腔ケア用歯ブラシ
1か月前
株式会社コーセー
組成物
6か月前
個人
透析装置の洗浄方法
6か月前
個人
マウスピース
2か月前
個人
スプレー式目薬容器
4か月前
株式会社ニデック
眼科装置
14日前
株式会社いうら
介助リフト
5か月前
個人
根管治療用のファイル
6か月前
株式会社ダリヤ
皮膚洗浄剤
17日前
株式会社ニデック
眼科装置
10日前
株式会社ニデック
検眼装置
6か月前
オンキヨー株式会社
聴診器
6か月前
個人
マッサージガン保持具
5か月前
個人
圧排器具
2か月前
個人
弾性材一体コルセット
5か月前
株式会社ニデック
眼科装置
3か月前
株式会社ダリヤ
染毛剤組成物
1か月前
オンキヨー株式会社
電子機器
6か月前
株式会社ニデック
OCT装置
2か月前
株式会社コーセー
香料組成物
2か月前
株式会社コーセー
水系化粧料
2か月前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ