TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024070304
公報種別
公開特許公報(A)
公開日
2024-05-23
出願番号
2022180693
出願日
2022-11-11
発明の名称
位置演算装置
出願人
SMC株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
,
個人
主分類
G01D
5/12 20060101AFI20240516BHJP(測定;試験)
要約
【解決手段】第1方向に相対移動可能な移動体に取り付けられた磁石38の位置を演算する位置演算装置10であって、前記第1方向に所定距離Pだけ互いに離間して配置される第1磁気センサ52および第2磁気センサ54と、前記第1磁気センサにより検出される第1磁束密度B1の、前記第1方向の第1成分と第2方向の第2成分との第1比R1と、前記第2磁気センサにより検出される第2磁束密度B2の、前記第1方向の第3成分と前記第2方向の第4成分との第2比R2と、前記所定距離とを用いて、前記磁石の前記位置を演算する演算回路と、を備える。
【選択図】図1
特許請求の範囲
【請求項1】
固定部材に対して第1方向に相対移動可能な移動体に取り付けられた磁石の位置を演算する位置演算装置であって、
前記固定部材に取り付けられ、前記第1方向に所定距離だけ互いに離間して配置され、且つ前記磁石により生じる磁場の磁束密度を検出する第1磁気センサおよび第2磁気センサと、
前記第1磁気センサにより検出される第1磁束密度の、前記第1方向の第1成分と、前記第1方向に垂直な第2方向の第2成分との第1比と、前記第2磁気センサにより検出される第2磁束密度の、前記第1方向の第3成分と前記第2方向の第4成分との第2比と、前記所定距離とを用いて、前記磁石の前記位置を演算する演算回路と、
を備える、位置演算装置。
続きを表示(約 5,100 文字)
【請求項2】
請求項1に記載の位置演算装置であって、
前記磁石が有する2つの磁極は前記第1方向に並び、
前記演算回路は、前記磁石の前記位置を、前記第2成分がゼロ以上であるか否かと、前記第4成分がゼロ以上であるか否かと、前記2つの磁極の並び順とに応じて演算する、位置演算装置。
【請求項3】
請求項1に記載の位置演算装置であって、
前記演算回路は、前記磁石の前記位置を、前記第2成分と前記第4成分との積がゼロより小さいか否かに応じて演算し、
前記第2成分と前記第4成分との前記積がゼロ以上である場合、前記演算回路は、前記第1磁束密度の大きさが前記第2磁束密度の大きさより大きいか否かに応じて、前記磁石の前記位置を演算する、位置演算装置。
【請求項4】
請求項3に記載の位置演算装置であって、
前記第2成分と前記第4成分との前記積がゼロより小さい場合、前記演算回路は、前記第1方向における前記磁石の前記位置Xmを、前記第1比R1と前記第2比R2と前記所定距離Pとを用いた式(1)により演算し、
前記第1方向における前記磁石の前記位置Xmは、前記第1方向における前記第1磁気センサと前記第2磁気センサとの間の中点を原点とした場合の位置である、位置演算装置。
TIFF
2024070304000026.tif
21
113
【請求項5】
請求項4に記載の位置演算装置であって、
前記第2成分と前記第4成分との前記積がゼロより小さい場合、前記演算回路は、前記第2方向における前記磁石の前記位置Cを、前記第1比R1と前記第2比R2と前記所定距離Pとを用いた式(2)により演算し、
前記第2方向における前記磁石の前記位置Cは、前記第1方向における前記第1磁気センサと前記第2磁気センサとの間の前記中点を原点とした場合の位置である、位置演算装置。
TIFF
2024070304000027.tif
21
113
【請求項6】
請求項4に記載の位置演算装置であって、
前記第2成分と前記第4成分との前記積がゼロ以上であって、且つ前記第1磁束密度の前記大きさが前記第2磁束密度の前記大きさより大きい場合、前記演算回路は、前記第1方向における前記磁石の前記位置Xmを、前記第1比R1と前記第2比R2と前記所定距離Pとを用いた式(3)により演算し、
前記第2成分と前記第4成分との前記積がゼロ以上であって、且つ前記第1磁束密度の前記大きさが前記第2磁束密度の前記大きさより小さい場合、前記演算回路は、前記第1方向における前記磁石の前記位置Xmを、前記第1比R1と前記第2比R2と前記所定距離Pとを用いた式(4)により演算する、位置演算装置。
TIFF
2024070304000028.tif
30
113
【請求項7】
請求項6に記載の位置演算装置であって、
前記第2成分と前記第4成分との前記積がゼロ以上であって、且つ前記第1磁束密度の前記大きさが前記第2磁束密度の前記大きさより大きい場合、前記演算回路は、前記第2方向における前記磁石の前記位置Cを、前記第1比R1と前記第2比R2と前記所定距離Pとを用いた式(5)により演算し、
前記第2成分と前記第4成分との前記積がゼロ以上であって、且つ前記第1磁束密度の前記大きさが前記第2磁束密度の前記大きさより小さい場合、前記演算回路は、前記第2方向における前記磁石の前記位置Cを、前記第1比R1と前記第2比R2と前記所定距離Pとを用いた式(6)により演算する、位置演算装置。
TIFF
2024070304000029.tif
30
113
【請求項8】
請求項5に記載の位置演算装置であって、
前記第1方向をX軸方向とし、且つ前記第2方向をY軸方向とするXY座標平面に、前記磁石、前記第1磁気センサおよび前記第2磁気センサが配置された場合、前記第1成分および前記第2成分は、前記XY座標平面において前記第1磁気センサにより検出される前記第1磁束密度の前記X軸方向のX成分Tx1および前記第1磁束密度の前記Y軸方向のY成分Ty1であり、且つ前記第3成分および前記第4成分は、前記XY座標平面において前記第2磁気センサにより検出される前記第2磁束密度の前記X軸方向のX成分Tx2および前記第2磁束密度の前記Y軸方向のY成分Ty2であり、
前記第2成分と前記第4成分との前記積がゼロ以上であって、且つ前記第1磁束密度の前記大きさが前記第2磁束密度の前記大きさより大きい場合、前記演算回路は、前記中点に対する前記X軸方向における前記磁石の前記位置Xmを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記式(2)により演算された、前記中点に対する前記Y軸方向における前記磁石の前記位置Cとを用いた式(7)により演算し、
前記第2成分と前記第4成分との前記積がゼロ以上であって、且つ前記第1磁束密度の前記大きさが前記第2磁束密度の前記大きさより小さい場合、前記演算回路は、前記中点に対する前記X軸方向における前記磁石の前記位置Xmを、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記式(2)により演算された、前記中点に対する前記Y軸方向における前記磁石の前記位置Cとを用いた式(8)により演算する、位置演算装置。
TIFF
2024070304000030.tif
33
120
【請求項9】
請求項1に記載の位置演算装置であって、
前記第1方向であるX軸方向と、前記X軸方向に垂直で且つ前記第2方向とは異なるY軸方向と、前記X軸方向および前記Y軸方向のいずれにも垂直で且つ前記第2方向とは異なるZ軸方向とで形成されるXYZ座標空間に、前記磁石、前記第1磁気センサおよび前記第2磁気センサが配置された場合、前記第1成分は、前記XYZ座標空間において前記第1磁気センサにより検出される前記第1磁束密度の前記X軸方向のX成分Tx1であり、前記第2成分は、前記第1磁束密度の前記Y軸方向のY成分Ty1と前記第1磁束密度の前記Z軸方向のZ成分Tz1との合成成分であり、前記第3成分は、前記XYZ座標空間において前記第2磁気センサにより検出される前記第2磁束密度の前記X軸方向のX成分Tx2であり、且つ前記第4成分は、前記第2磁束密度の前記Y軸方向のY成分Ty2と前記第2磁束密度の前記Z軸方向のZ成分Tz2との合成成分であり、
前記第1磁束密度の前記Y成分Ty1と、前記第2磁束密度の前記Y成分Ty2との積がゼロより小さい場合、前記演算回路は、
前記X軸方向における前記磁石の前記位置Xmを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記第1磁束密度の前記Z成分Tz1と、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記第2磁束密度の前記Z成分Tz2と、前記所定距離Pとを用いた式(9)により演算し、
前記Y軸方向における前記磁石の前記位置Cを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記第1磁束密度の前記Z成分Tz1と、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記第2磁束密度の前記Z成分Tz2と、前記所定距離Pとを用いた式(10)により演算し、
前記Z軸方向における前記磁石の前記位置Zmを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記第1磁束密度の前記Z成分Tz1と、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記第2磁束密度の前記Z成分Tz2と、前記所定距離Pとを用いた式(11)により演算し、
前記式(9)、前記式(10)および前記式(11)における分母DIV1は、式(12)により表され、
前記X軸方向における前記磁石の前記位置Xm、前記Y軸方向における前記磁石の前記位置C、および前記Z軸方向における前記磁石の前記位置Zmは、前記第1方向における前記第1磁気センサと前記第2磁気センサとの間の中点を原点とした場合の位置である、位置演算装置。
TIFF
2024070304000031.tif
94
148
【請求項10】
請求項9に記載の位置演算装置であって、
前記第1磁束密度の前記Y成分Ty1と、前記第2磁束密度の前記Y成分Ty2との前記積がゼロ以上であって、且つ前記第1磁束密度の大きさが前記第2磁束密度の大きさより大きい場合、前記演算回路は、
前記中点に対する前記X軸方向における前記磁石の前記位置Xmを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記第1磁束密度の前記Z成分Tz1と、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記第2磁束密度の前記Z成分Tz2と、前記所定距離Pとを用いた式(13)により演算し、
前記中点に対する前記Y軸方向における前記磁石の前記位置Cを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記第1磁束密度の前記Z成分Tz1と、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記第2磁束密度の前記Z成分Tz2と、前記所定距離Pとを用いた式(14)により演算し、
前記中点に対する前記Z軸方向における前記磁石の前記位置Zmを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記第1磁束密度の前記Z成分Tz1と、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記第2磁束密度の前記Z成分Tz2と、前記所定距離Pとを用いた式(15)により演算し、
前記式(13)、前記式(14)および前記式(15)における分母DIV2は、式(16)により表され、
前記第1磁束密度の前記Y成分Ty1と、前記第2磁束密度の前記Y成分Ty2との前記積がゼロ以上であって、且つ前記第1磁束密度の大きさが前記第2磁束密度の大きさより小さい場合、前記演算回路は、
前記中点に対する前記X軸方向における前記磁石の前記位置Xmを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記第1磁束密度の前記Z成分Tz1と、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記第2磁束密度の前記Z成分Tz2と、前記所定距離Pとを用いた式(17)により演算し、
前記中点に対する前記Y軸方向における前記磁石の前記位置Cを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記第1磁束密度の前記Z成分Tz1と、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記第2磁束密度の前記Z成分Tz2と、前記所定距離Pとを用いた式(18)により演算し、
前記中点に対する前記Z軸方向における前記磁石の前記位置Zmを、前記第1磁束密度の前記X成分Tx1と、前記第1磁束密度の前記Y成分Ty1と、前記第1磁束密度の前記Z成分Tz1と、前記第2磁束密度の前記X成分Tx2と、前記第2磁束密度の前記Y成分Ty2と、前記第2磁束密度の前記Z成分Tz2と、前記所定距離Pとを用いた式(19)により演算し、
前記式(17)、前記式(18)および前記式(19)における分母DIV3は、式(20)により表される、位置演算装置。
TIFF
2024070304000032.tif
158
155
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、位置演算装置に関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
特許文献1には、2つのセンサ素子を用いて磁石の位置信号を生成するセンサが開示されている。磁石は、空気圧シリンダのピストンに固定されている。そのため、磁石は直線的な相対運動を行う。センサ素子が検出する磁場の互いに垂直な2つの成分のARCTAN値を用いて、磁石の位置信号が生成される。
【先行技術文献】
【特許文献】
【0003】
特開2019-49528号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されたARCTAN値から磁石の位置を演算するためには、センサ素子と、磁石の相対運動が行われる直線との間の距離の情報が必要である。しかし、磁石の取り付け位置は、製品の種類或いは個体毎に異なる場合がある。したがって、製品の種類或いは個体毎に、ARCTAN値を磁石の位置に変換するための変換表が必要になるという課題がある。
【0005】
本発明は、上述した課題を解決することを目的とする。
【課題を解決するための手段】
【0006】
本発明の一態様は、固定部材に対して第1方向に相対移動可能な移動体に取り付けられた磁石の位置を演算する位置演算装置であって、前記固定部材に取り付けられ、前記第1方向に所定距離だけ互いに離間して配置され、且つ前記磁石により生じる磁場の磁束密度を検出する第1磁気センサおよび第2磁気センサと、前記第1磁気センサにより検出される第1磁束密度の、前記第1方向の第1成分と、前記第1方向に垂直な第2方向の第2成分との第1比と、前記第2磁気センサにより検出される第2磁束密度の、前記第1方向の第3成分と前記第2方向の第4成分との第2比と、前記所定距離とを用いて、前記磁石の前記位置を演算する演算回路と、を備える。
【発明の効果】
【0007】
本発明によれば、磁石の位置を正確に演算することができる。
【図面の簡単な説明】
【0008】
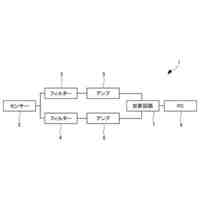
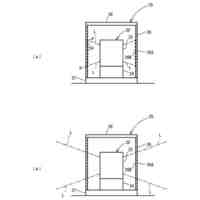
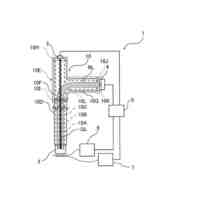
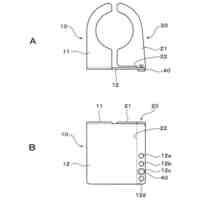
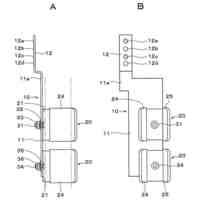
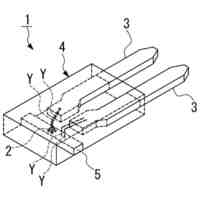
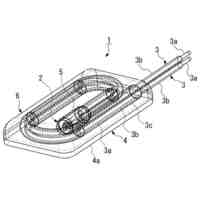
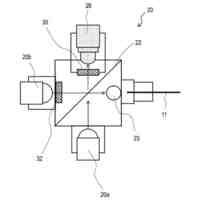
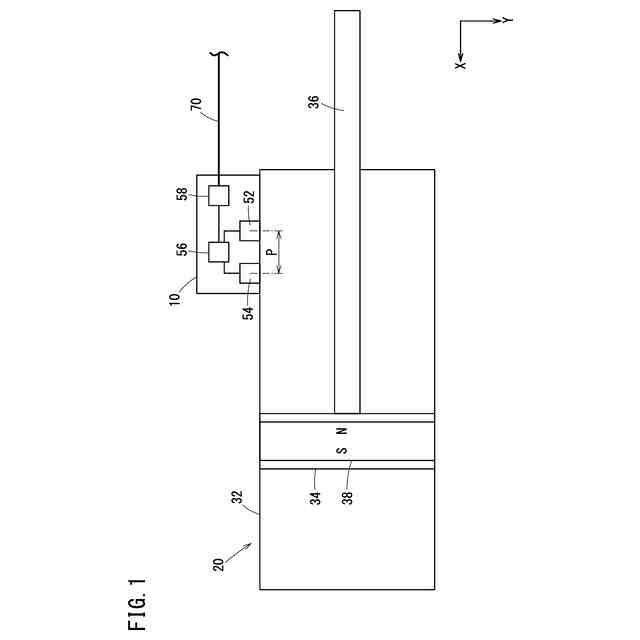
図1は、一実施の形態に係る位置演算装置と、アクチュエータとを例示する図である。
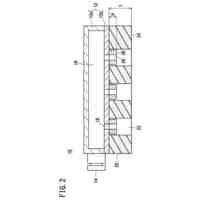
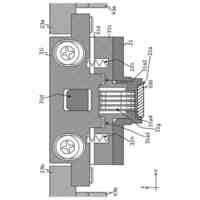
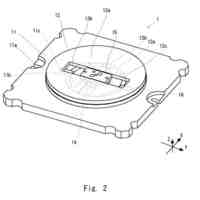
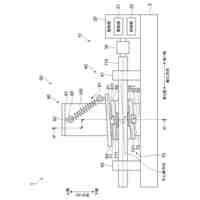
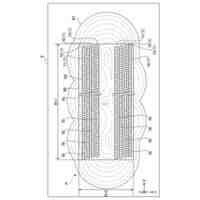
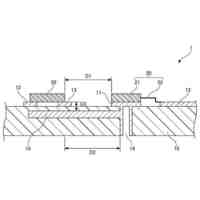
図2は、シリンダに位置演算装置が取り付けられた状態を説明するための図である。
図3は、磁石により生じる磁場の磁束密度を模式的に示す図である。
図4は、磁石の位置の演算を説明するための図である。
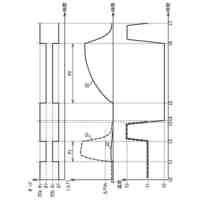
図5は、磁石の位置の実測値と、位置演算装置による演算値との比較結果を示すグラフである。
図6は、磁石の位置の実測値と、位置演算装置による演算値との比較結果を示すグラフである。
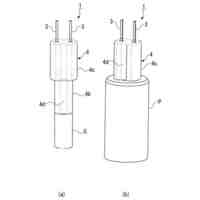
図7Aは、任意の点における磁束密度のX成分、Y成分およびZ成分を模式的に示す図である。図7Bは、磁束密度のY成分およびZ成分が、X軸の正方向からYZ座標平面へ投影された状態を模式的に示す図である。
図8は、第1磁気センサおよび第2磁気センサに加えて第3磁気センサが配置された場合における、磁石の位置の演算を説明するための図である。
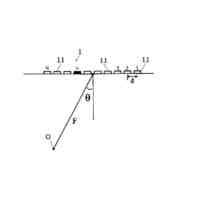
図9は、磁石が有する2つの磁極の並び方向がX軸方向に一致しない例を示す図である。
【発明を実施するための形態】
【0009】
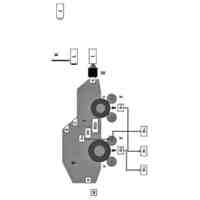
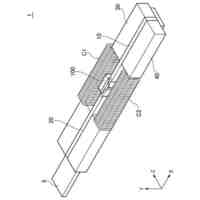
図1は、一実施の形態に係る位置演算装置10と、アクチュエータ20とを例示する図である。アクチュエータ20は、固定部材と移動体とを有する。アクチュエータ20の固定部材は、例えば図1に示すシリンダ32である。アクチュエータ20の移動体は、例えば図1に示すピストン34である。ピストン34は、シリンダ32に対して第1方向に移動可能である。第1方向をX軸方向とする。第1方向に垂直な第2方向を、図1に示す例ではY軸方向とする。ロッド36はピストン34に取り付けられている。ロッド36はピストン34とともにX軸方向に相対移動する。
【0010】
ピストン34に磁石38が取り付けられている。磁石38は2つの磁極であるN極およびS極を有する。図1に、磁石38が有する2つの磁極の並び順が例示されている。磁石38の2つの磁極は、X軸方向の正方向に向かって、N極およびS極の順に並んでいる。ピストン34がシリンダ32に対してX軸方向に相対移動すると、磁石38もシリンダ32に対してX軸方向に相対移動する。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
SMC株式会社
吸着パッド
4日前
オンキヨー株式会社
システム
10日前
横河電機株式会社
光学プローブ
10日前
株式会社ヨコオ
検査治具
22日前
個人
歩行者音声ガイドシステム
21日前
株式会社豊田自動織機
無人走行体
25日前
昭電工業株式会社
測定装置
23日前
太陽誘電株式会社
検出装置
17日前
大和製衡株式会社
重量選別機
15日前
トヨタ自動車株式会社
測定治具
25日前
矢崎総業株式会社
センサ
17日前
村田機械株式会社
変位検出装置
25日前
キーコム株式会社
試験システム
28日前
株式会社東芝
センサ
2日前
株式会社ニシヤマ
物品取付装置
18日前
株式会社ニシヤマ
物品取付装置
18日前
キーコム株式会社
試験システム
28日前
個人
氷河融雪水流出量の推定方法
9日前
大同特殊鋼株式会社
形状検出装置
17日前
TDK株式会社
磁気センサ
22日前
株式会社不二越
X線測定装置
25日前
三菱マテリアル株式会社
温度センサ
18日前
トヨタ自動車株式会社
劣化推定装置
18日前
オムロン株式会社
スイッチング装置
28日前
日立Astemo株式会社
測定装置
1か月前
株式会社ミツトヨ
光学式エンコーダ
23日前
三晶エムイーシー株式会社
試料容器
3日前
三菱マテリアル株式会社
温度センサ
10日前
株式会社島津製作所
分析装置
17日前
三菱マテリアル株式会社
温度センサ
1か月前
大同特殊鋼株式会社
超音波探傷方法
1か月前
トヨタ自動車株式会社
空燃比算出装置
25日前
マレリ株式会社
推定装置
1日前
日本メクトロン株式会社
部品実装基板
28日前
株式会社フジキン
濃度測定装置
22日前
トヨタ自動車株式会社
電気機器
21日前
続きを見る
他の特許を見る
 特許ウォッチ
特許ウォッチ