TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2024055569
公報種別
公開特許公報(A)
公開日
2024-04-18
出願番号
2022162607
出願日
2022-10-07
発明の名称
3次元計測装置、3次元計測方法、プログラム、システム、及び物品の製造方法
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
主分類
G01C
3/06 20060101AFI20240411BHJP(測定;試験)
要約
【課題】対象物までの距離値を高精度に算出可能な3次元計測装置を提供する。
【解決手段】3次元計測装置であって、対象物を互いに異なる視点から撮像する複数の撮像部と、複数の撮像部により対象物を第1の条件で取得した第1の画像群と対象物を第1の条件とは異なる第2の条件で取得した第2の画像群と、を用いて対応付けを行うことにより、対象物までの距離値を算出する処理部と、を有し、処理部は、第1と第2の画像群それぞれの画像における照明光の波長に基づく画像特性、照明光の光源に起因する画像特性、照明光のパターンに起因する特徴の大きさの少なくとも1つの情報に基づいて第1と第2の画像群に対する対応付けを行うか、又は、情報に基づいて第1と第2の画像群に対して対応付けの前に行う処理を行った後に対応付けを行い、対応付けによって得られた視差値を用いて距離値を算出することを特徴とする。
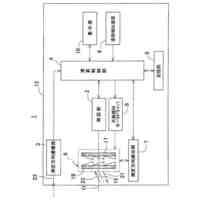
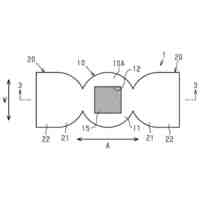
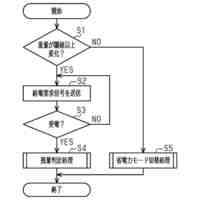
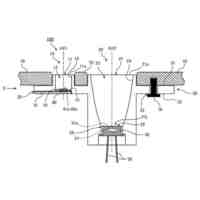
【選択図】図4
特許請求の範囲
【請求項1】
対象物を互いに異なる視点から撮像する複数の撮像部と、
前記複数の撮像部により前記対象物を第1の条件で取得した第1の画像群と前記対象物を前記第1の条件とは異なる第2の条件で取得した第2の画像群と、を用いて対応付けを行うことにより、前記対象物までの距離値を算出する処理部と、を有し、
前記処理部は、
前記第1と第2の画像群それぞれの画像における照明光の波長に基づく画像特性、照明光の光源に起因する画像特性、照明光のパターンに起因する特徴の大きさの少なくとも1つの情報に基づいて前記第1と第2の画像群に対する前記対応付けを行うか、又は、前記情報に基づいて前記第1と第2の画像群に対して前記対応付けの前に行う処理を行った後に前記対応付けを行い、
前記対応付けによって得られた視差値を用いて前記距離値を算出することを特徴とする3次元計測装置。
続きを表示(約 990 文字)
【請求項2】
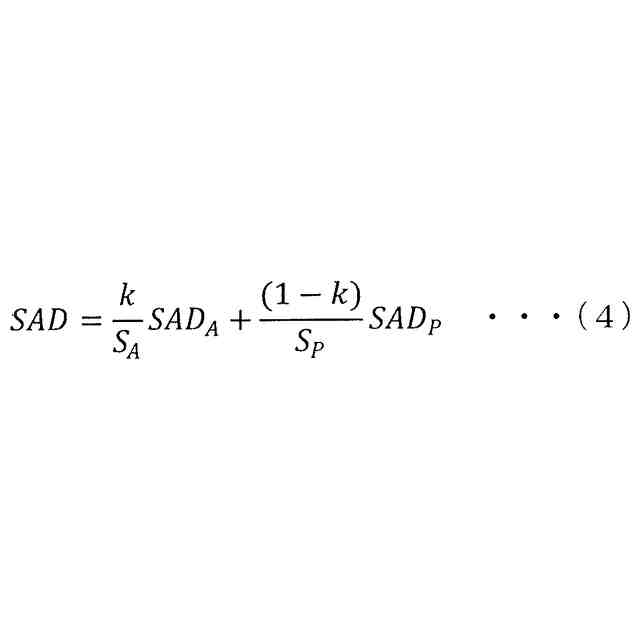
前記処理部は、前記情報に基づいて、前記第1と第2の画像群の画像から前記対応付けに用いる評価値をそれぞれ算出し、算出したそれぞれの評価値を統合し、前記統合した評価値を用いて前記距離値を算出することを特徴とする請求項1に記載の3次元計測装置。
【請求項3】
前記処理部は、前記第1と第2の画像群それぞれの画像における輝度値に基づき前記評価値を算出することを特徴とする請求項2に記載の3次元計測装置。
【請求項4】
前記処理部は、前記第1と第2の画像群それぞれの画像に所定の変換処理を行い得られたビット列のハミング距離を用いて前記評価値を算出することを特徴とする請求項2に記載の3次元計測装置。
【請求項5】
前記処理部は、前記照明光の波長に基づき、前記第1と第2の画像群の少なくとも一方に対して画像の歪み補正を行うことを特徴とする請求項1に記載の3次元計測装置。
【請求項6】
前記処理部は、前記第1と第2の画像群の画像の少なくとも一方に対して、所定のノイズ除去処理を行うことを特徴とする請求項1に記載の3次元計測装置。
【請求項7】
前記処理部は、前記照明光のパターンに起因する特徴の大きさに基づき、前記第1と第2の画像群の画像に対して前記対応付けに用いる領域を設定し、前記対応付けに用いる評価値を算出することを特徴とする請求項2に記載の3次元計測装置。
【請求項8】
前記処理部は、前記第1の画像群に含まれる第1の画像と前記第2の画像群に含まれる第2の画像に基づき、統合した画像として第3の画像を生成することを特徴とする請求項1に記載の3次元計測装置。
【請求項9】
前記処理部は、前記第3の画像を用いて前記距離値を算出することを特徴とする請求項8に記載の3次元計測装置。
【請求項10】
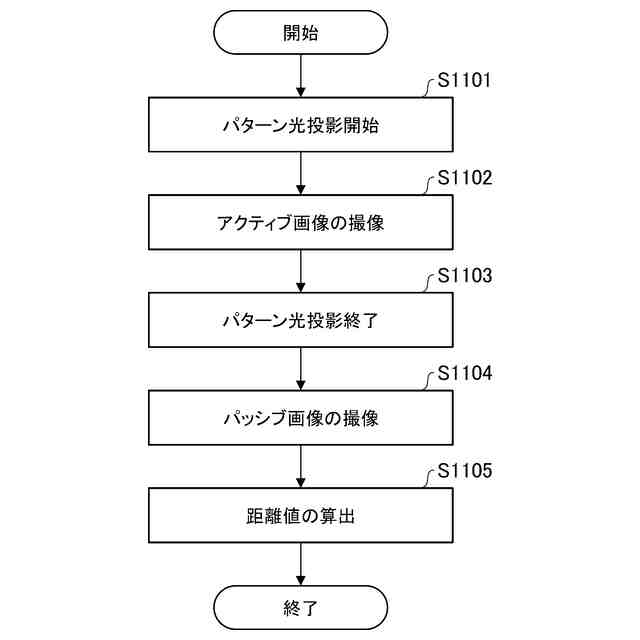
前記対象物に前記照明光のパターンを投影する投影部を有し、
前記複数の撮像部は、前記投影部により前記対象物に前記照明光のパターンを投影した画像が含まれる第1の画像群と、前記対象物に前記照明光のパターンを投影しない画像が含まれる第2の画像群とを取得することを特徴とする請求項1に記載の3次元計測装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、3次元計測装置、3次元計測装方法、プログラム、システム、及び物品の製造方法に関する。
続きを表示(約 1,400 文字)
【背景技術】
【0002】
従来、工場の生産ラインでは、3次元計測装置を搭載したロボットを用いて、製造物の組み立てや検査が行われてきた。従来の3次元計測装置として、異なる視点の2つのカメラで撮影した画像間の対応点を探索し、対応点の視差情報を基に三角測量の原理に基づき距離点を計測するステレオ計測が知られている。
【0003】
特許文献1では、異なる位置の2つのカメラと1つのパターンを投影するプロジェクタを備え、第1の距離マップと、第2の距離マップとを算出し、それらに対して信頼度に基づく重みづけ投票を行って最終的な距離マップを算出する方法を開示している。
【0004】
尚、計測対象物にドットパターンを投影し1つのカメラで撮影した画像上のドットパターンとプロジェクタのドットパターンとの対応関係から三角測量の原理により計測した距離マップである。第1の距離マップは、能動的に対応付け手掛かりを作り出す方式のため、アクティブステレオ方式とも呼ぶ。第2の距離マップは、計測対象物にドットパターンを投影せずに異なる2つのカメラで撮影距離した画像からステレオ計測した距離マップである。第2の距離マップは、受動的に対応付けを行う方式のため、パッシブステレオ方式とも呼ぶ
【0005】
このようにアクティブステレオ方式とパッシブステレオ方式を組み合わせることで、テクスチャの少ない計測対象物を含む様々な対象に対して奥行きマップの計測が可能となり、より高精度な計測を実現できる。
【先行技術文献】
【特許文献】
【0006】
米国特許第10636155号明細書
【発明の概要】
【発明が解決しようとする課題】
【0007】
しかし、従来の方法は、アクティブステレオ方式とパッシブステレオ方式との双方でそれぞれ個別にマッチングを行って距離を一旦算出する方法を用いている。そのため、それぞれで正しく対応関係が求まらない場合に後処理で情報をまとめたとしても精度が不十分となり、改善の余地があった。
【0008】
そこで、本発明では、対象物までの距離値を高精度に算出可能な3次元計測装置を提供することを目的としている。
【課題を解決するための手段】
【0009】
上記目的を達成するために、本発明の一側面としての3次元計測装置は、対象物を互いに異なる視点から撮像する複数の撮像部と、複数の撮像部により対象物を第1の条件で取得した第1の画像群と対象物を第1の条件とは異なる第2の条件で取得した第2の画像群と、を用いて対応付けを行うことにより、対象物までの距離値を算出する処理部と、を有し、処理部は、第1と第2の画像群それぞれの画像における照明光の波長に基づく画像特性、照明光の光源に起因する画像特性、照明光のパターンに起因する特徴の大きさの少なくとも1つの情報に基づいて第1と第2の画像群に対する対応付けを行うか、又は、情報に基づいて第1と第2の画像群に対して対応付けの前に行う処理を行った後に対応付けを行い、対応付けによって得られた視差値を用いて距離値を算出することを特徴とする。
【発明の効果】
【0010】
本発明によれば、対象物までの距離値を高精度に算出可能な3次元計測装置を提供することができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康状態検査材
16日前
株式会社CCT
表示装置
15日前
株式会社SUBARU
車両
23日前
株式会社SUBARU
車両
23日前
日本精機株式会社
センサユニット
7日前
株式会社チノー
放射温度計
8日前
ニデック株式会社
検出装置
22日前
株式会社トプコン
測定装置
22日前
日本精機株式会社
車両用表示装置
22日前
株式会社トプコン
測量装置
21日前
株式会社トプコン
測量装置
21日前
個人
コンベックスルール用測定部品
14日前
株式会社テイエルブイ
処理装置
1日前
トヨタ自動車株式会社
給水治具
13日前
株式会社XMAT
点検システム
23日前
本多電子株式会社
水中探知装置
22日前
大和製衡株式会社
組合せ計量装置
6日前
大和製衡株式会社
組合せ計量装置
6日前
大和製衡株式会社
組合せ計量装置
6日前
東将精工株式会社
測定器具補助具
15日前
三菱マテリアル株式会社
温度センサ
13日前
東レエンジニアリング株式会社
衝撃試験機
16日前
株式会社ミツトヨ
光学式エンコーダ
16日前
中部電力株式会社
スミヤ濾紙
21日前
トヨタ自動車株式会社
表示装置
7日前
古野電気株式会社
魚種識別システム及び方法
28日前
ニシム電子工業株式会社
液位検出装置
7日前
豊田合成株式会社
重量測定装置
13日前
住友金属鉱山株式会社
検査装置
6日前
住友金属鉱山株式会社
セレン評価方法
6日前
株式会社 システムスクエア
検査装置
15日前
日立建機株式会社
作業機械
20日前
株式会社ティアンドデイ
温度測定装置
13日前
東レ株式会社
センサー素子及びガスセンサー
20日前
株式会社不二越
歯車寸法測定装置
15日前
マグネデザイン株式会社
GSR素子の製造方法
1日前
続きを見る
他の特許を見る





 特許ウォッチ
特許ウォッチ