TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024054618
公報種別
公開特許公報(A)
公開日
2024-04-17
出願番号
2022160955
出願日
2022-10-05
発明の名称
ロボットハンド、ロボットハンドの制御方法、ロボットシステム、ロボットシステムを用いた物品の製造方法、制御プログラム及び記録媒体
出願人
キヤノン株式会社
代理人
個人
,
個人
,
個人
,
個人
,
個人
主分類
B25J
15/10 20060101AFI20240410BHJP(手工具;可搬型動力工具;手工具用の柄;作業場設備;マニプレータ)
要約
【課題】 機構の数を低減しつつ、所定の指で作業しながら、別の指で別の作業を実行することができるようにする。
【解決手段】 互いに接近または離間する2つの第1指部と、少なくとも1つの関節を有する1つの第2指部と、を備え、第2指部は、第1指部が互いに接近または離間する第1方向と交差する第2方向を基準として揺動する、ことを特徴とするロボットハンドを採用した。
【選択図】 図2
特許請求の範囲
【請求項1】
互いに接近または離間する2つの第1指部と
少なくとも1つの関節を有する1つの第2指部と、を備え、
前記第2指部は、前記第1指部が互いに接近または離間する第1方向と交差する第2方向を基準として揺動する、
ことを特徴とするロボットハンド。
続きを表示(約 930 文字)
【請求項2】
請求項1に記載のロボットハンドにおいて、
前記第2指部は、前記第1指部を接触させた状態で、前記第1指部の少なくとも一方に接触できる位置に設けられている、
ことを特徴とするロボットハンド。
【請求項3】
請求項1に記載のロボットハンドにおいて、
前記第2指部は、前記第1指部を互いに離間させた状態において前記第1指部の間に配置される、
ことを特徴とするロボットハンド。
【請求項4】
請求項1に記載のロボットハンドにおいて、
前記第2指部の長さは前記第1指部の長さよりも長い、
ことを特徴とするロボットハンド。
【請求項5】
請求項1に記載のロボットハンドにおいて、
前記第2指部において対象物と接触する部位を、前記第1指部により保持した対象物に接触させることができる、
ことを特徴とするロボットハンド。
【請求項6】
請求項5に記載のロボットハンドにおいて、
前記第1指部と前記第2指部とが設けられるハンド基部を備え、
前記部位を、前記ハンド基部の側に移動させることができる、
ことを特徴とするロボットハンド。
【請求項7】
請求項5に記載のロボットハンドにおいて、
前記部位において、力に関する情報を取得できるセンサを備えている、
ことを特徴とするロボットハンド。
【請求項8】
請求項1に記載のロボットハンドにおいて、
前記第2方向は前記第1方向に対して垂直な方向である、
ことを特徴とするロボットハンド。
【請求項9】
請求項1に記載のロボットハンドにおいて、
前記第1指部は互いに直線動作することで、互いに接近または離間する、
ことを特徴とするロボットハンド。
【請求項10】
請求項1に記載のロボットハンドにおいて、
前記第2指部は、前記関節を少なくとも2つ備えている、
ことを特徴とするロボットハンド。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、ロボットハンドに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
近年、従来人手で行われていたカメラやプリンタなどの工業製品の製造工程、薬品の希釈等、様々な動作を、ロボットハンドとロボットアームを有するロボット装置を用いて自動化する要求が高まっている。このような作業の自動化では、ロボットアームとロボットハンドで複数の部品を単純に把持するだけでなく、把持をしながら別の動作が可能なロボットハンドが必要となる。
【0003】
例えば特許文献1のロボットハンドは、第1指から第4指を有し、それぞれの指は関節C、D軸が把持爪の平行を保つように移動し、関節B軸が把持爪と平行な軸周りに旋回し、E軸が把持爪の延伸方向に伸縮する構成である。さらに第1指に対して第2指が、第3指に対して第4指が、それぞれ独立に直線移動して接近離間動作する。以上のように、特許文献1のロボットハンドは合計で18自由度を有する構成である。これにより所定の指で部品を把持しながら、別の指で別の動作を行うことを可能としている。
【先行技術文献】
【特許文献】
【0004】
特開2008-260110号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
しかし、特許文献1の構成のロボットハンドで、18自由度を有するため機構が複雑となり、ロボットハンドのサイズが大型となってしまっていた。そこで本発明は、機構の数を低減しつつ、所定の指で作業しながら、別の指で別の作業を実行することができるようにする。
【課題を解決するための手段】
【0006】
本発明においては、互いに接近または離間する2つの第1指部と、少なくとも1つの関節を有する1つの第2指部と、を備え、前記第2指部は、前記第1指部が互いに接近または離間する第1方向と交差する第2方向を基準として揺動する、ことを特徴とするロボットハンドを採用した。
【発明の効果】
【0007】
本発明によれば、機構の数を低減しつつ、所定の指で部品を把持しながら、別の指で別の動作を実行できる。
【図面の簡単な説明】
【0008】
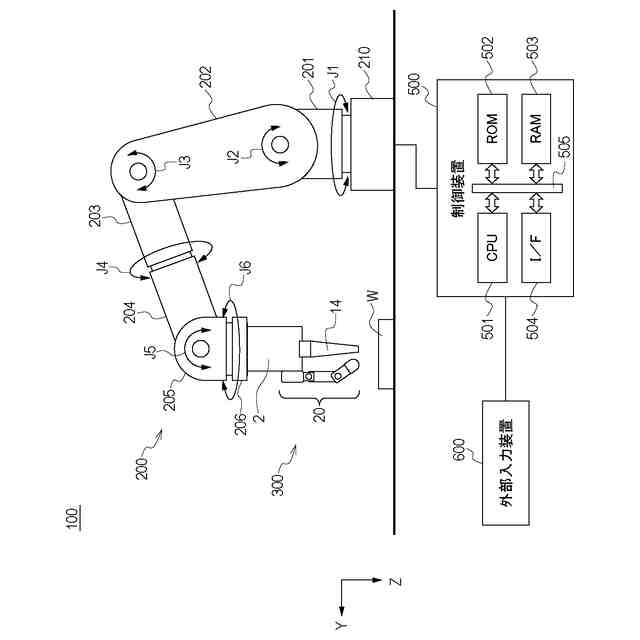
実施形態におけるロボットシステム100の概略図である。
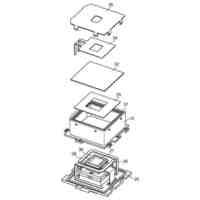
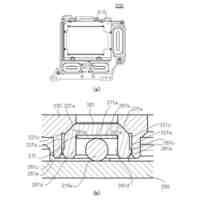
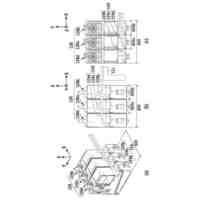
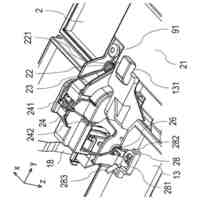
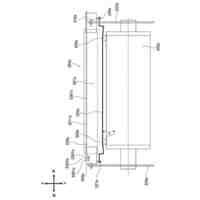
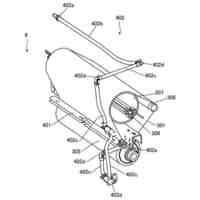
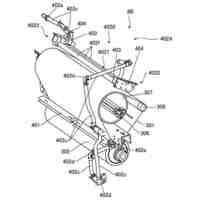
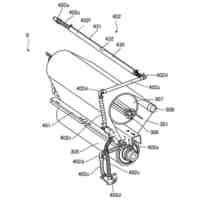
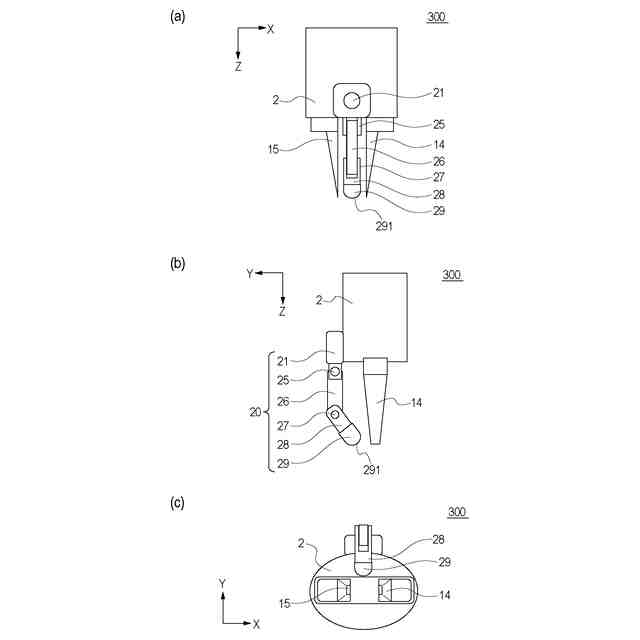
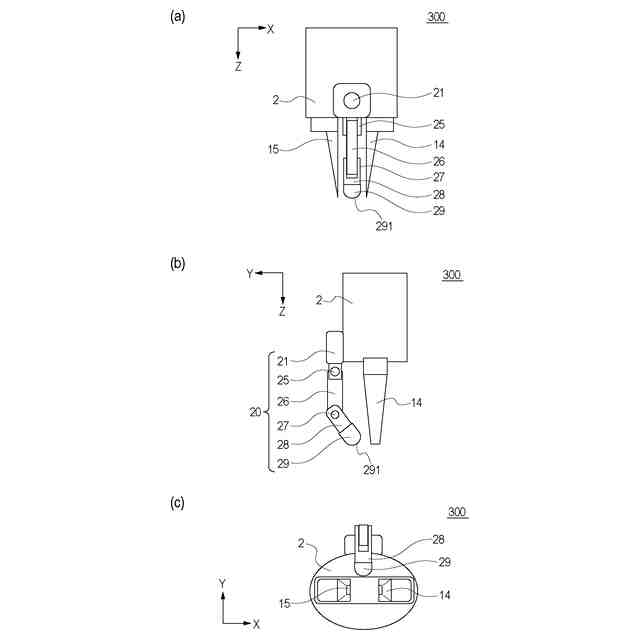
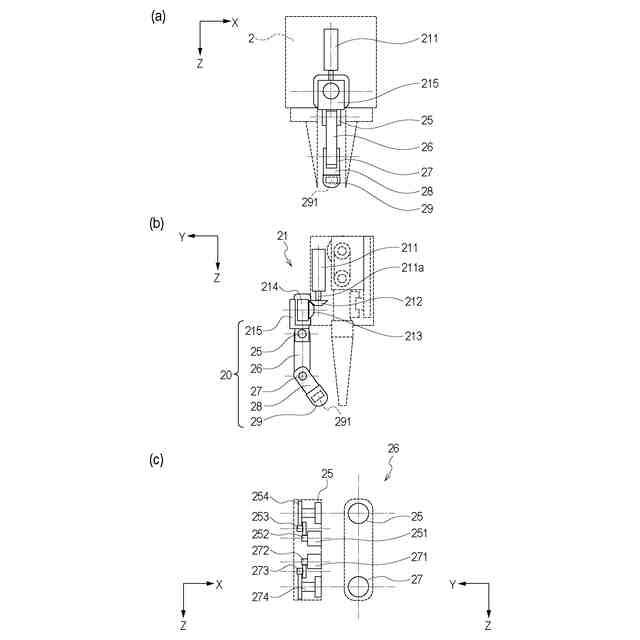
実施形態におけるロボットハンド本体300の説明図である。
実施形態におけるロボットハンド本体300の説明図である。
実施形態におけるロボットハンド本体300の説明図である。
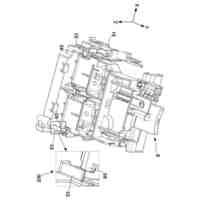
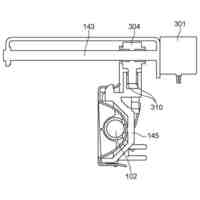
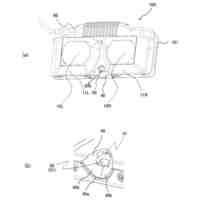
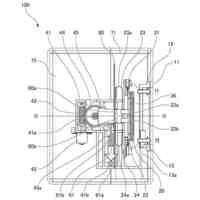
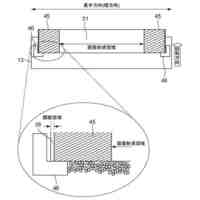
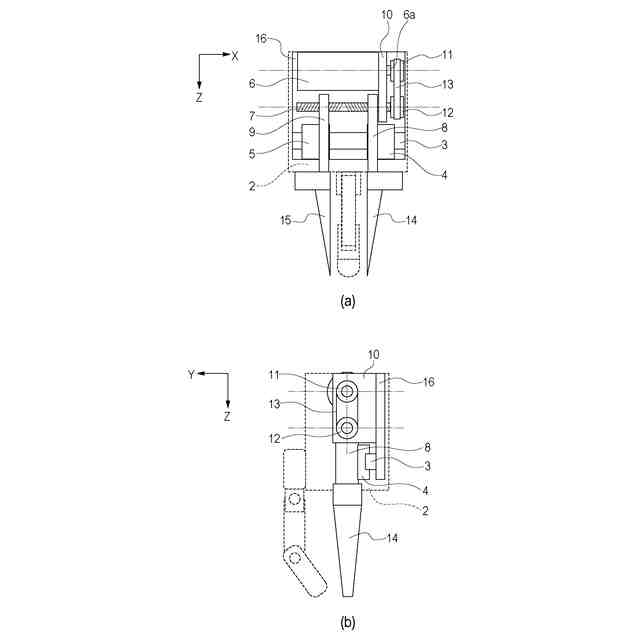
実施形態におけるロボットハンド本体300の詳細図である。
実施形態におけるロボットハンド本体300の詳細図である。
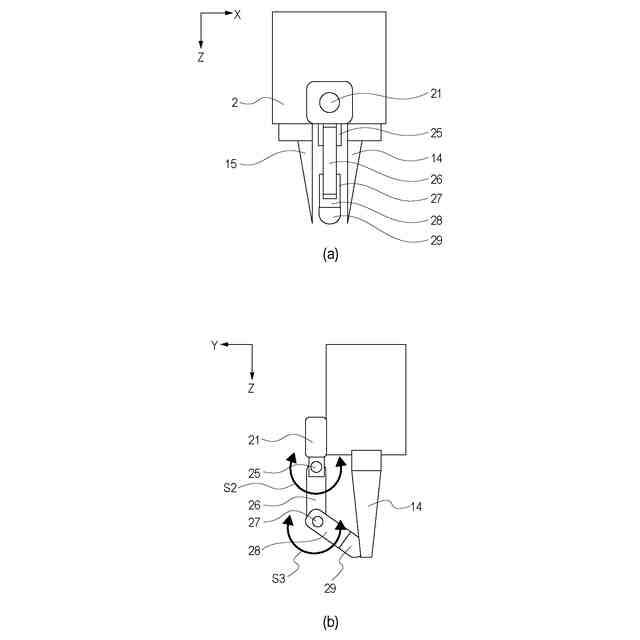
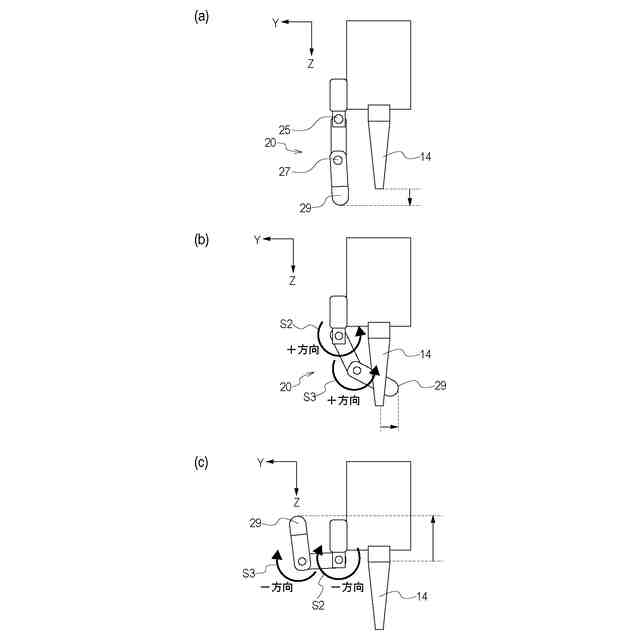
実施形態におけるロボットハンド本体300の動作に関する説明図である。
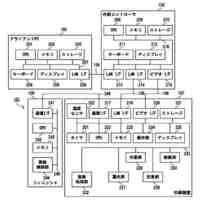
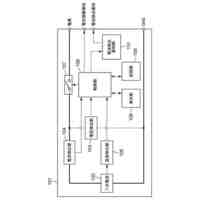
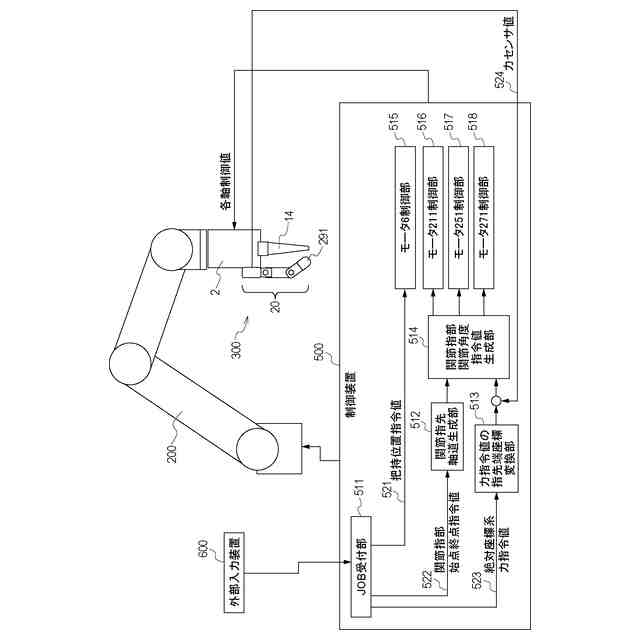
実施形態におけるロボットシステム100の制御ブロック図である。
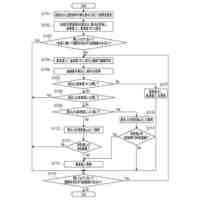
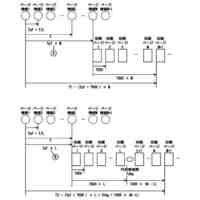
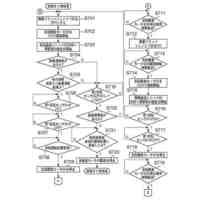
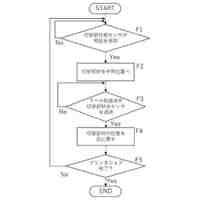
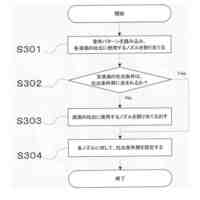
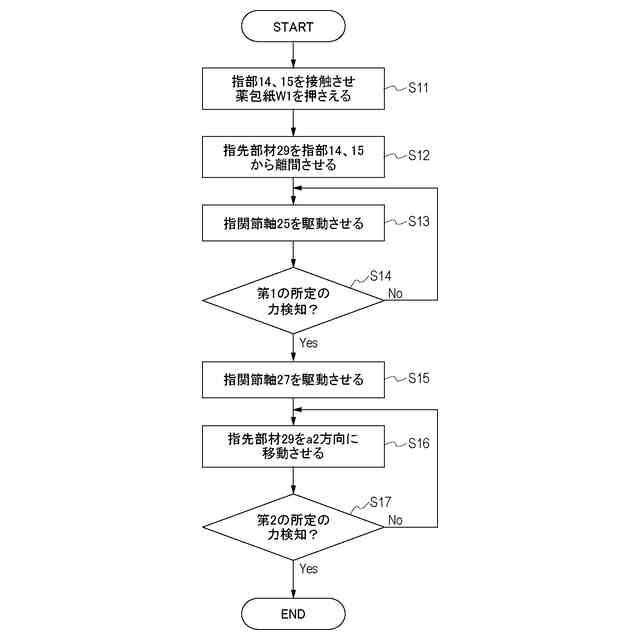
実施形態における制御フローチャートである。
図9における制御フローチャートにより制御されるロボットハンド本体300の状態図である。
実施形態における制御フローチャートである。
図11における制御フローチャートにより制御されるロボットハンド本体300の状態図である。
実施形態における制御フローチャートである。
図13における制御フローチャートにより制御されるロボットハンド本体300の状態図である。
実施形態におけるロボットハンド本体300を制御した際の状態図である。
実施形態におけるロボットハンド本体300を制御した際の状態図である。
実施形態におけるロボットハンド本体300を制御した際の状態図である。
【発明を実施するための形態】
【0009】
以下、添付図面に示す実施例を参照して本発明を実施するための形態につき説明する。なお、以下に示す実施例はあくまでも一例であり、例えば細部の構成については本発明の趣旨を逸脱しない範囲において当業者が適宜変更することができる。また、本実施形態で取り上げる数値は、参考数値であって、本発明を限定するものではない。なお以下の図面において、図中の矢印X、Y、Zはロボットシステムの全体の座標系を示す。一般に、XYZ3次元座標系は、設置環境全体のワールド座標系を示す。その他、制御の都合などによって、ロボットハンド、指部、関節などに関して適宜ローカル座標系を用いる場合がある。
【0010】
(第1の実施形態)
図1は、本発明を採用可能なロボットシステムの概略構成を示した説明図である。本実施形態のロボットシステム100は、ロボットアーム本体200、ロボットハンド本体300、制御装置500、外部入力装置600で構成される。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
キヤノン株式会社
トナー
14日前
キヤノン株式会社
トナー
14日前
キヤノン株式会社
制御装置
今日
キヤノン株式会社
光学機器
5日前
キヤノン株式会社
撮像装置
14日前
キヤノン株式会社
撮像装置
12日前
キヤノン株式会社
記録装置
12日前
キヤノン株式会社
発光装置
7日前
キヤノン株式会社
電子機器
5日前
キヤノン株式会社
記録装置
19日前
キヤノン株式会社
表示装置
20日前
キヤノン株式会社
カメラ装置
5日前
キヤノン株式会社
画像形成装置
7日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
6日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
画像形成装置
12日前
キヤノン株式会社
有機発光素子
12日前
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
今日
キヤノン株式会社
画像形成装置
15日前
キヤノン株式会社
画像形成装置
19日前
キヤノン株式会社
画像形成装置
20日前
キヤノン株式会社
液滴吐出装置
5日前
キヤノン株式会社
放射線撮影装置
20日前
キヤノン株式会社
バッテリーパック
12日前
キヤノン株式会社
仮想現実システム
7日前
キヤノン株式会社
スイッチング電源
7日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ