TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024034564
公報種別
公開特許公報(A)
公開日
2024-03-13
出願番号
2022138884
出願日
2022-09-01
発明の名称
自車位置測位装置及び自車位置測位方法
出願人
三菱電機株式会社
代理人
弁理士法人山王内外特許事務所
主分類
G01C
21/28 20060101AFI20240306BHJP(測定;試験)
要約
【課題】車載センサからのセンサ情報に基づいて、自車両の周囲に存在している地物の位置を検出できない状況下でも、自車両の位置の測位精度を高めることができるようにする。
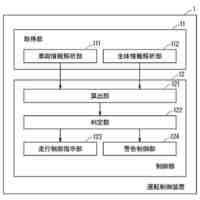
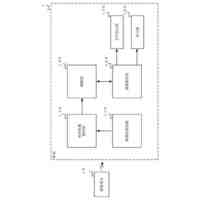
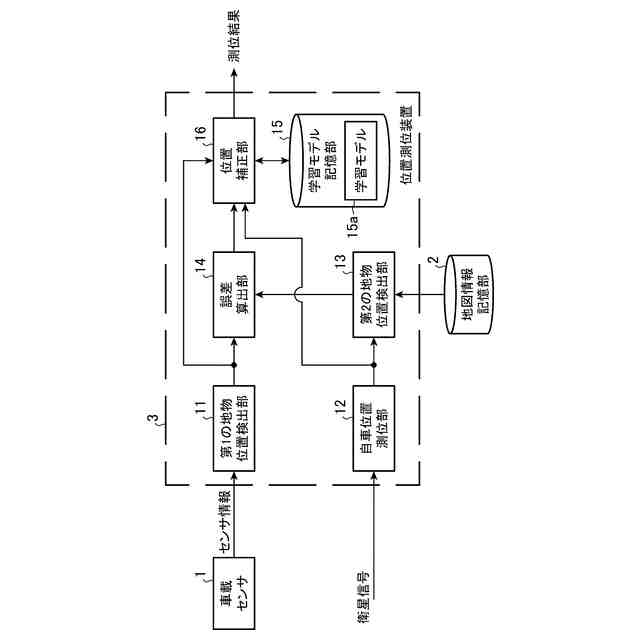
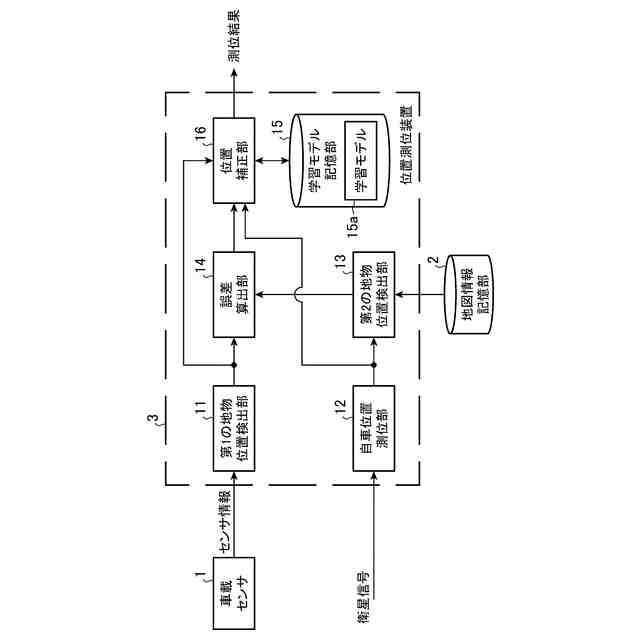
【解決手段】衛星測位システムから発射された衛星信号を用いて、自車両の位置を測位する自車位置測位部12と、自車位置測位部12における位置の測位誤差を推定するための誤差推定用モデルを用いて、自車位置測位部12により測位された自車両の位置に対応する測位誤差を推定し、測位誤差を用いて、自車位置測位部12により測位された自車両の位置を補正する位置補正部16とを備えるように、自車位置測位装置3を構成した。
【選択図】図1
特許請求の範囲
【請求項1】
衛星測位システムから発射された衛星信号を用いて、自車両の位置を測位する自車位置測位部と、
前記自車位置測位部における位置の測位誤差を推定するための誤差推定用モデルを用いて、前記自車位置測位部により測位された自車両の位置に対応する測位誤差を推定し、前記測位誤差を用いて、前記自車位置測位部により測位された自車両の位置を補正する位置補正部と
を備えた自車位置測位装置。
続きを表示(約 2,200 文字)
【請求項2】
前記誤差推定用モデルは、前記自車位置測位部における位置の測位誤差が学習済みの学習モデルであり、
前記位置補正部は、
前記自車位置測位部により測位された自車両の位置を示す位置データを前記学習モデルに与えて、前記学習モデルから、前記位置データが示す位置に対応する測位誤差を示す測位誤差データを取得し、前記測位誤差を用いて、前記自車位置測位部により測位された自車両の位置を補正することを特徴とする請求項1記載の自車位置測位装置。
【請求項3】
前記自車両の周囲を観測する車載センサからセンサ情報を取得し、前記センサ情報に基づいて、前記自車両の周囲に存在している地物の前記自車両に対する相対位置を検出する第1の地物位置検出部と、
前記自車位置測位部により測位された自車両の位置と地図情報とに基づいて、前記地物の前記自車両に対する相対位置を検出する第2の地物位置検出部と、
前記第1の地物位置検出部により検出された相対位置と前記第2の地物位置検出部により検出された相対位置との誤差を算出する誤差算出部とを備え、
前記位置補正部は、
前記第1の地物位置検出部による位置検出の信頼度を算出し、前記信頼度が許容信頼度以上であれば、前記自車位置測位部により測位された自車両の位置を示す位置データと、前記誤差算出部により算出された誤差を示す誤差データとを含む学習データを前記学習モデルに与えて、前記誤差データが示す誤差を測位誤差として、前記測位誤差を前記学習モデルに学習させ、
前記算出した信頼度が前記許容信頼度よりも小さければ、前記自車位置測位部により測位された自車両の位置を示す位置データを前記学習モデルに与えて、前記学習モデルから、前記位置データが示す位置に対応する測位誤差を示す測位誤差データを取得し、当該測位誤差を用いて、前記自車位置測位部により測位された自車両の位置を補正することを特徴とする請求項2記載の自車位置測位装置。
【請求項4】
前記位置補正部は、
前記算出した信頼度が前記許容信頼度以上であれば、位置の測位結果として、前記自車位置測位部により測位された自車両の位置を示す位置データを出力し、前記算出した信頼度が前記許容信頼度よりも小さければ、位置の測位結果として、補正後の位置を示す位置データを出力することを特徴とする請求項3記載の自車位置測位装置。
【請求項5】
前記誤差推定用モデルは、前記自車位置測位部における位置の測位誤差の状態方程式を示す状態空間モデルであり、
前記位置補正部は、
前記自車位置測位部により測位された自車両の位置を前記状態方程式に代入することで測位誤差を算出し、前記測位誤差を用いて、前記自車位置測位部により測位された自車両の位置を補正することを特徴とする請求項1記載の自車位置測位装置。
【請求項6】
前記位置補正部は、
時刻に対応する測位誤差を表す近似関数に対して、前記誤差算出部により誤差が算出された時刻を代入することで、前記自車位置測位部における位置の測位誤差を算出し、前記自車位置測位部により測位された自車両の位置を示す位置データと、前記算出した測位誤差を示す誤差データとを含む学習データを前記学習モデルに与えて、前記測位誤差を前記学習モデルに学習させることを特徴とする請求項3記載の自車位置測位装置。
【請求項7】
前記位置補正部は、
前記自車位置測位部における位置の測位誤差として、前記誤差算出部により算出された複数の時刻における誤差の平均値を算出し、前記自車位置測位部により測位された自車両の位置を示す位置データと、前記平均値とを含む学習データを前記学習モデルに与えて、前記平均値を前記学習モデルに学習させることを特徴とする請求項3記載の自車位置測位装置。
【請求項8】
前記位置補正部は、
前記自車位置測位部により測位された自車両の位置の変化が閾値以上であれば、前記測位誤差を前記学習モデルに学習させる際に、前記位置の変化が前記閾値以上になる前に、前記自車位置測位部により測位された自車両の位置についての学習の重みを、前記位置の変化が前記閾値以上になった後に、前記自車位置測位部により測位された自車両の位置についての学習の重みよりも下げさせることを特徴とする請求項3記載の自車位置測位装置。
【請求項9】
前記車載センサからセンサ情報を取得し、前記センサ情報に基づいて、前記自車両の周囲の環境を検知する周囲環境検知部を備え、
前記位置補正部は、
前記測位誤差を前記学習モデルに学習させる際に、前記周囲環境検知部による周囲環境の検知結果に基づいて、前記誤差算出部により算出された誤差についての学習の重みを変化させることを特徴とする請求項3記載の自車位置測位装置。
【請求項10】
前記位置補正部は、
前記誤差推定用モデルを用いて、前記自車位置測位部により測位された自車両の位置に対応する測位誤差として、前記自車両の進行方向に直交する方向である車幅方向の測位誤差を推定し、前記車幅方向の測位誤差を用いて、前記自車位置測位部により測位された自車両の車幅方向の位置を補正することを特徴とする請求項1記載の自車位置測位装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本開示は、自車位置測位装置及び自車位置測位方法に関するものである。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
自車両の位置を測位する自車位置測位装置がある(例えば、特許文献1を参照)。当該自車位置測位装置は、座標取得部、認識部及び制御部を備えている。
座標取得部は、衛星から到来する電波に基づいて、自車両の位置を測位し、自車両の位置座標を取得する。認識部は、自車両が走行する道路の車線を示す車線情報を取得し、車線情報に基づいて、車線と自車両との距離を認識する。制御部は、認識部により認識された距離に基づいて、座標取得部により取得された自車両の位置座標を補正する。
【先行技術文献】
【特許文献】
【0003】
特開2017-211193号公報
【発明の概要】
【発明が解決しようとする課題】
【0004】
特許文献1に開示されている自車位置測位装置では、例えば、道路に車線が表示されていない場合、又は、道路に表示されている車線の表示が薄くなっている場合、認識部が、車線情報を取得できないことがある。制御部は、認識部により車線情報が取得されなければ、座標取得部により取得された自車両の位置座標を補正することによって、位置の測位精度を高めることができないという課題があった。
【0005】
本開示は、上記のような課題を解決するためになされたもので、車載センサからのセンサ情報に基づいて、自車両の周囲に存在している地物の位置を検出できない状況下でも、自車両の位置の測位精度を高めることができる自車位置測位装置を得ることを目的とする。
【課題を解決するための手段】
【0006】
本開示に係る自車位置測位装置は、衛星測位システムから発射された衛星信号を用いて、自車両の位置を測位する自車位置測位部と、自車位置測位部における位置の測位誤差を推定するための誤差推定用モデルを用いて、自車位置測位部により測位された自車両の位置に対応する測位誤差を推定し、測位誤差を用いて、自車位置測位部により測位された自車両の位置を補正する位置補正部とを備えている。
【発明の効果】
【0007】
本開示によれば、車載センサからのセンサ情報に基づいて、自車両の周囲に存在している地物の位置を検出できない状況下でも、自車両の位置の測位精度を高めることができる。
【図面の簡単な説明】
【0008】
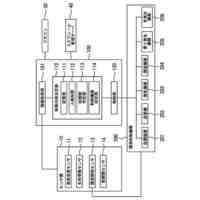
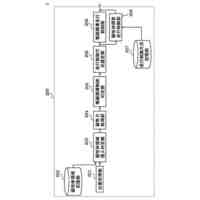
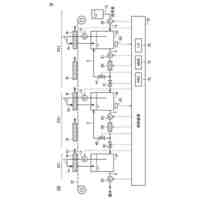
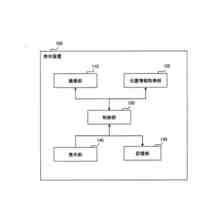
実施の形態1に係る自車位置測位装置3を示す構成図である。
実施の形態1に係る自車位置測位装置3のハードウェアを示すハードウェア構成図である。
自車位置測位装置3が、ソフトウェア又はファームウェア等によって実現される場合のコンピュータのハードウェア構成図である。
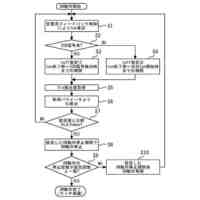
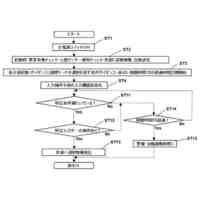
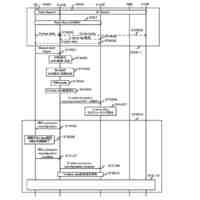
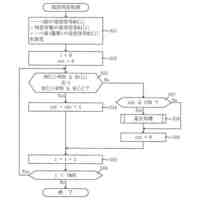
自車位置測位装置3の処理手順である自車位置測位方法を示すフローチャートである。
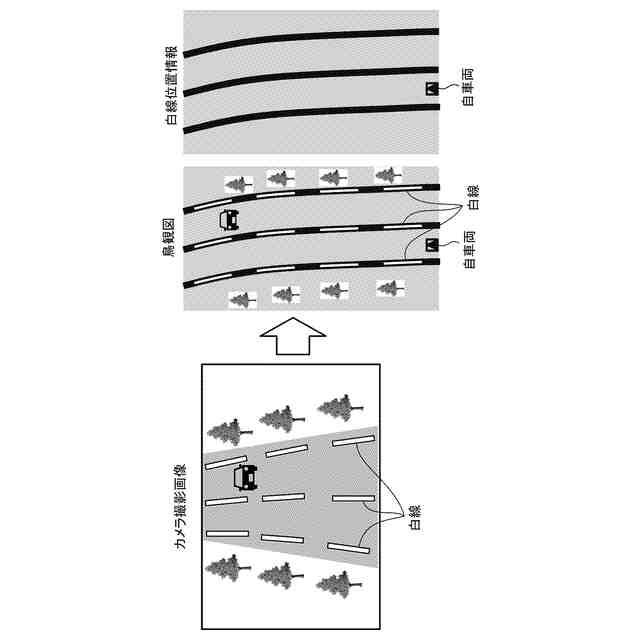
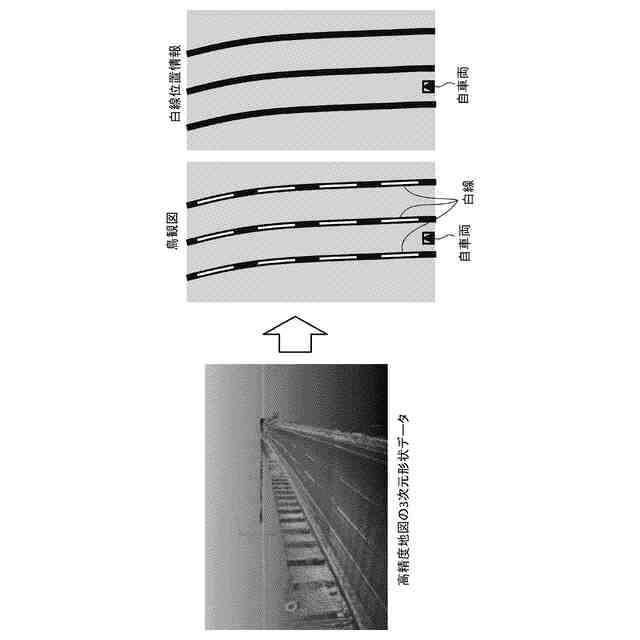
第1の地物位置検出部11による白線の検出例を示す説明図である。
第2の地物位置検出部13による白線の検出例を示す説明図である。
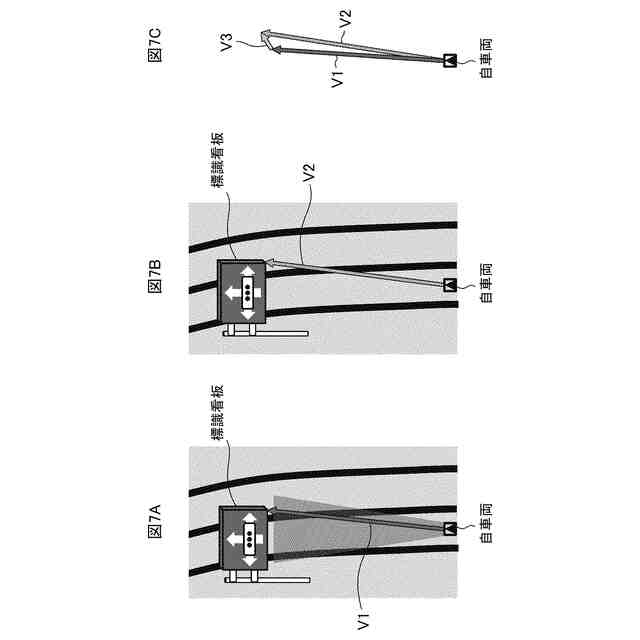
図7Aは、第1の地物位置検出部11により検出された相対位置を示す説明図、図7Bは、第2の地物位置検出部13により検出された相対位置を示す説明図、図7Cは、誤差算出部14により算出された誤差を示す説明図である。
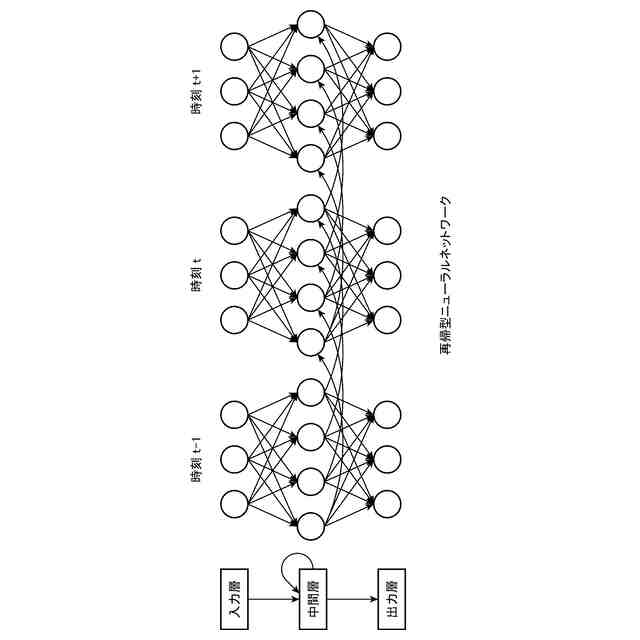
学習モデル15aを実現する再帰型ニューラルネットワークを示す説明図である。
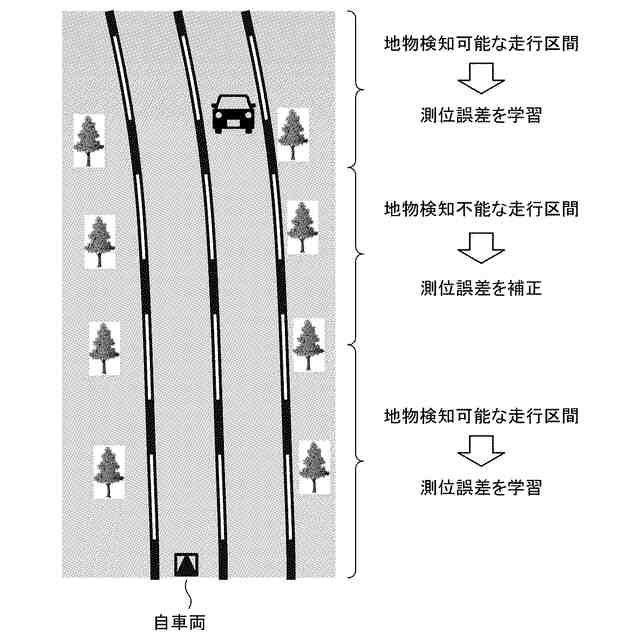
第1の地物位置検出部11が地物の相対位置を検出することが可能な走行区間と、地物の相対位置を検出することが不可能な走行区間とを示す説明図である。
実施の形態2に係る自車位置測位装置3を示す構成図である。
実施の形態2に係る自車位置測位装置3のハードウェアを示すハードウェア構成図である。
状態空間モデル17aの一例を示す説明図である。
実施の形態3に係る自車位置測位装置3を示す構成図である。
実施の形態3に係る自車位置測位装置3のハードウェアを示すハードウェア構成図である。
時刻tに対応する測位誤差Yを表す近似関数の一例を示す説明図である。
実施の形態4に係る自車位置測位装置3を示す構成図である。
実施の形態4に係る自車位置測位装置3のハードウェアを示すハードウェア構成図である。
位置補正部19により算出される測位誤差の一例を示す説明図である。
実施の形態5に係る自車位置測位装置3を示す構成図である。
実施の形態5に係る自車位置測位装置3のハードウェアを示すハードウェア構成図である。
自車位置測位部12により測位された自車両の位置の変化を示す説明図である。
実施の形態6に係る自車位置測位装置3を示す構成図である。
実施の形態6に係る自車位置測位装置3のハードウェアを示すハードウェア構成図である。
図24Aは、障害物が少ない走行環境条件を示す説明図である。図24Bは、障害物が多い走行環境条件を示す説明図である。
【発明を実施するための形態】
【0009】
以下、本開示をより詳細に説明するために、本開示を実施するための形態について、添付の図面に従って説明する。
【0010】
実施の形態1.
図1は、実施の形態1に係る自車位置測位装置3を示す構成図である。
図2は、実施の形態1に係る自車位置測位装置3のハードウェアを示すハードウェア構成図である。
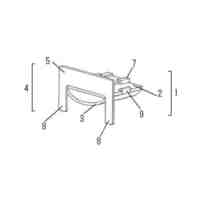
図1において、車載センサ1は、例えば、カメラ、LiDAR(Light Detection And Ranging)、ミリ波センサ、又は、ソナーを備えている。
車載センサ1は、自車両の周囲を観測し、周囲の観測結果を示すセンサ情報を自車位置測位装置3に出力する。
地図情報記憶部2は、例えば、ハードディスク、又は、RAM(Random Access Memory)によって実現される。
地図情報記憶部2は、地図情報を記憶している。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
三菱電機株式会社
照明器具
4日前
三菱電機株式会社
半導体装置
4日前
三菱電機株式会社
電動駆動装置
5日前
三菱電機株式会社
電動駆動装置
5日前
三菱電機株式会社
空調制御システム
4日前
三菱電機株式会社
ピックアップステージ
4日前
三菱電機株式会社
通信装置および通信方法
11日前
三菱電機株式会社
半導体装置、電力変換装置
4日前
三菱電機株式会社
トランスおよび電力変換装置
5日前
三菱電機株式会社
運転制御装置及び運転制御方法
4日前
三菱電機株式会社
降圧型定電流回路及び点灯装置
11日前
三菱電機株式会社
加熱調理器及び加熱調理システム
4日前
三菱電機株式会社
回転電機の電機子および回転電機
6日前
三菱電機株式会社
無線通信システム、および、学習装置
4日前
三菱電機株式会社
通信装置、通信システム、および通信方法
5日前
三菱電機株式会社
走行制御装置、自動運転システム及び走行制御方法
6日前
三菱電機株式会社
回転電機のステータおよび回転電機のステータの製造方法
5日前
三菱電機ビルソリューションズ株式会社
洗浄装置および洗浄方法
4日前
三菱電機ビルソリューションズ株式会社
エレベータ用巻上機および油分漏れ検知装置
4日前
三菱電機株式会社
移動体通信システム、基地局および移動端末
6日前
三菱電機株式会社
ファジングデータ生成装置、ファジングデータ生成システム、パケット構成解析装置、及び、ネットワーク状態遷移管理装置
5日前
三菱電機ビルソリューションズ株式会社
移動体制御装置、移動体、移動体制御サーバ、ビルシステム、移動体制御方法および移動体制御プログラム
4日前
三菱電機株式会社
衛星情報伝送システム、インフラストラクチャ衛星、双方向通信端末、衛星見守りシステムおよび見守りセンタ
10日前
個人
健康状態検査材
14日前
株式会社CCT
表示装置
13日前
日本精機株式会社
車両用表示装置
20日前
株式会社チノー
放射温度計
6日前
株式会社SUBARU
車両
21日前
株式会社トプコン
測定装置
20日前
株式会社トプコン
測量装置
19日前
株式会社トプコン
測量装置
19日前
ニデック株式会社
検出装置
20日前
株式会社SUBARU
車両
21日前
日本精機株式会社
センサユニット
5日前
個人
コンベックスルール用測定部品
12日前
本多電子株式会社
水中探知装置
20日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ