TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024030458
公報種別
公開特許公報(A)
公開日
2024-03-07
出願番号
2022133380
出願日
2022-08-24
発明の名称
車両検知装置
出願人
富士電機株式会社
代理人
個人
,
個人
主分類
G01V
8/20 20060101AFI20240229BHJP(測定;試験)
要約
【課題】水滴の影響を受けにくく、薄型化が可能な車両検知装置を提供する。
【解決手段】車両検知装置は、車両を光学的に検知する車両検知装置であって、車両検知用の光を受光する受光器と、受光器から出力される信号に基づいて車両検知の演算処理を行う演算処理部と、を備える。受光器は、第1筐体と、第1筐体の内部に配置される複数の受光センサと、第1筐体に取り付けられ、第1筐体の外部から内部へ光を導く第1光学窓と、を有する。複数の受光センサは、光を光電変換して第1信号を出力する第1受光センサと、車両の進行方向に平行な第1方向で第1受光センサと隣り合って配置され、光を光電変換して第2信号を出力する第2受光センサと、を有する。演算処理部は、第1受光センサから出力される第1信号と第2受光センサから出力される第2信号とを比較して信号レベルが高い方の信号を選択し、選択された信号に基づいて車両の有無を判定する。
【選択図】図4B
特許請求の範囲
【請求項1】
車両を光学的に検知する車両検知装置であって、
車両検知用の光を受光する受光器と、
前記受光器から出力される信号に基づいて車両検知の演算処理を行う演算処理部と、を備え、
前記受光器は、
第1筐体と、
前記第1筐体の内部に配置される複数の受光センサと、
前記第1筐体に取り付けられ、前記第1筐体の外部から内部へ前記光を導く第1光学窓と、を有し、
前記複数の受光センサは、
前記光を光電変換して第1信号を出力する第1受光センサと、
前記車両の進行方向に平行な第1方向で前記第1受光センサと隣り合って配置され、前記光を光電変換して第2信号を出力する第2受光センサと、を有し、
前記演算処理部は、
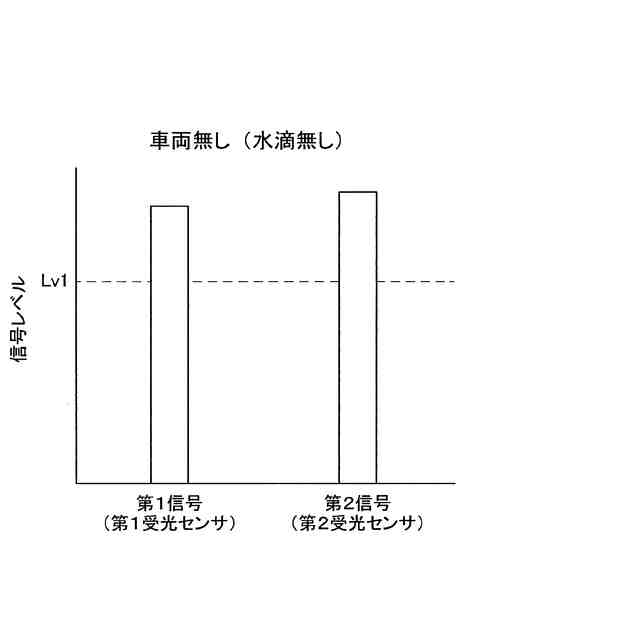
前記第1受光センサから出力される前記第1信号と前記第2受光センサから出力される前記第2信号とを比較して信号レベルが高い方の信号を選択し、選択された前記信号に基づいて前記車両の有無を判定する、車両検知装置。
続きを表示(約 1,600 文字)
【請求項2】
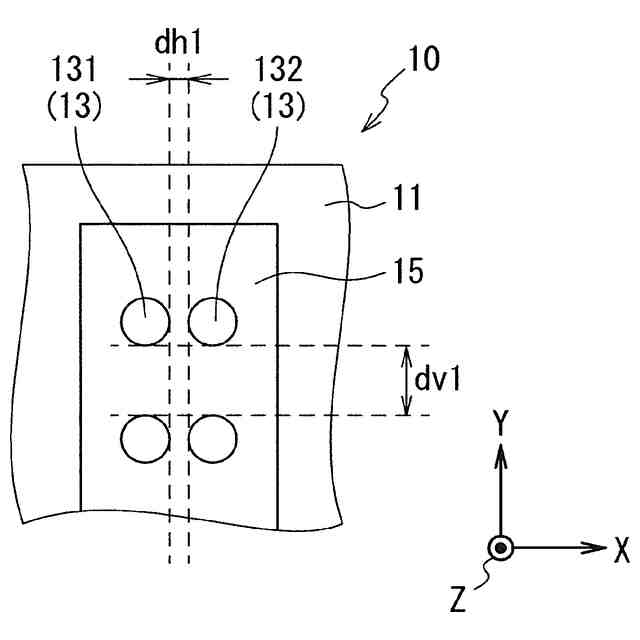
前記第1方向における前記第1受光センサと前記第2受光センサとの間の距離は、降雨時に前記第1光学窓に付着する水滴の予想される平均直径よりも大きい値に設定されている、請求項1に記載の車両検知装置。
【請求項3】
前記第1方向における前記第1受光センサと前記第2受光センサとの間の距離は、3mm以上8mm以下である、請求項1に記載の車両検知装置。
【請求項4】
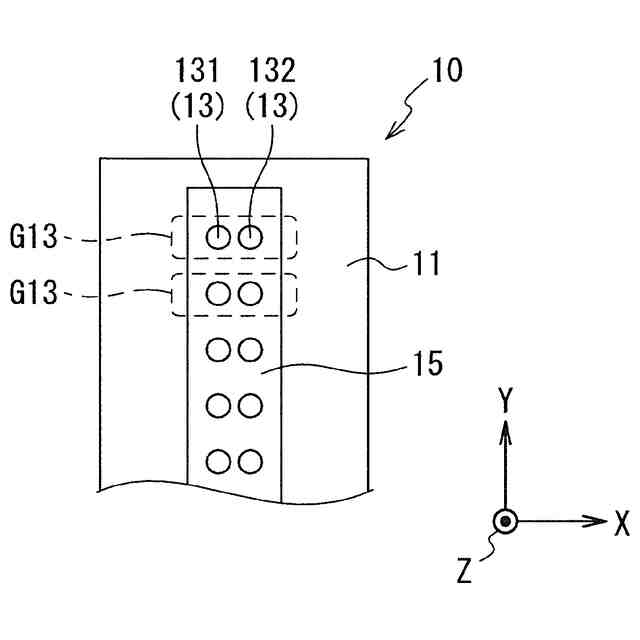
前記第1受光センサ及び前記第2受光センサが前記第1方向で1列に並ぶ受光センサ群を複数備え、
前記複数の受光センサ群は、前記第1方向と直交する第2方向に一定の間隔で配置されている、請求項1又は2に記載の車両検知装置。
【請求項5】
前記車両が通る道路を挟んで前記受光器の反対側に配置され、前記受光器に向けて前記光を投光する投光器、をさらに備える、請求項1又は2に記載の車両検知装置。
【請求項6】
前記投光器は、
第2筐体と、
前記第2筐体の内部に配置される複数の光源と、
前記第2筐体に取り付けられ、前記第2筐体の内部から外部へ前記光を導く第2光学窓と、を有し、
前記複数の光源は、
前記光を発する第1光源と、
前記第1方向で前記第1光源に隣り合って配置され、前記光を発する第2光源とを有し、
前記第1方向における前記第1光源と前記第2光源との間の距離は、降雨時に前記第1光学窓に付着する水滴の予想される平均直径よりも大きい値に設定されている、請求項5に記載の車両検知装置。
【請求項7】
前記投光器は、
第2筐体と、
前記第2筐体の内部に配置される複数の光源と、
前記第2筐体に取り付けられ、前記第2筐体の内部から外部へ前記光を導く第2光学窓と、を有し、
前記複数の光源は、
前記光を発する第1光源と、
前記第1方向で前記第1光源に隣り合って配置され、前記光を発する第2光源とを有し、
前記第1方向における前記第1光源と前記第2光源との間の距離は、3mm以上8mm以下である、請求項5に記載の車両検知装置。
【請求項8】
前記複数の受光センサは、
前記第1方向において前記第2受光センサを挟んで前記第1受光センサの反対側に配置され、前記第2受光センサに隣り合う第3受光センサ、をさらに備え、
前記第1方向における前記第2受光センサと前記第3受光センサとの間の距離は、降雨時に前記第1光学窓に付着する水滴の予想される平均直径よりも大きい値に設定されている、請求項1又は2に記載の車両検知装置。
【請求項9】
前記複数の受光センサは、
前記第1方向において前記第2受光センサを挟んで前記第1受光センサの反対側に配置され、前記第2受光センサに隣り合う第3受光センサ、をさらに備え、
前記第1方向における前記第2受光センサと前記第3受光センサとの間の距離は、3mm以上8mm以下である、請求項1又は2に記載の車両検知装置。
【請求項10】
前記複数の受光センサの各々の動作を制御する制御部、をさらに備え、
前記制御部は、
前記第1信号の信号レベルと前記第2信号の信号レベルとの差分を第1基準値と比較し、前記差分が前記第1基準値よりも大きい場合は、前記第1受光センサ及び前記第2受光センサをそれぞれ通常モードで動作させ、
前記差分が前記第1基準値以下の場合は、予め設定した時間が経過するまで、前記第1受光センサ及び前記第2受光センサの一方を前記通常モードよりも消費エネルギーが小さいスタンバイモードで動作させる、請求項1又は2に記載の車両検知装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両検知装置に関する。
続きを表示(約 2,500 文字)
【背景技術】
【0002】
有料道路の料金所付近に設けられる車両検知装置は、対となる投光器と受光器を備えており、それらは道路を挟んで向かい合うように設置される。車両検知装置は、投光器からの照射光を受光器で受光する仕組みである。具体的には、道路に車両がない場合は受光器に照射光が届き、道路に車両がある場合は車両によって照射光が遮光されるため受光器に届かない(例えば、特許文献1参照)。
【0003】
近年、狭い道路や壁設置に対応するため、車両検知装置の薄型化が望まれている。しかし、車両検知装置の受光器を薄くすると、光学窓と受光センサとの距離が縮まり、降雨時に光学窓に付着した水滴によって光の拡散影響が大きくなる。降雨時の水滴の影響を低減するために、マイクロ波の波長に対して送受信モジュールの厚さ方向の配置位置を工夫した構成の車両検知装置がこれまでに提案されている(特許文献2参照)。しかし、マイクロ波は光に比べて波長が長く、厚さ方向の配置位置が重要な特許文献2では薄型化が難しい。
【先行技術文献】
【特許文献】
【0004】
特開2003- 77089号公報
特開2015-118079号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
水滴の影響を受けにくく、薄型化が可能な車両検知装置が望まれている。
【0006】
本発明は、水滴の影響を受けにくく、薄型化が可能な車両検知装置を提供することを目的とする。
【課題を解決するための手段】
【0007】
上記課題を解決するために、本発明の一態様に係る車両検知装置は、車両を光学的に検知する車両検知装置であって、車両検知用の光を受光する受光器と、前記受光器から出力される信号に基づいて車両検知の演算処理を行う演算処理部と、を備える。前記受光器は、第1筐体と、前記第1筐体の内部に配置される複数の受光センサと、前記第1筐体に取り付けられ、前記第1筐体の外部から内部へ前記光を導く第1光学窓と、を有する。前記複数の受光センサは、前記光を光電変換して第1信号を出力する第1受光センサと、前記車両の進行方向に平行な第1方向で前記第1受光センサと隣り合って配置され、前記光を光電変換して第2信号を出力する第2受光センサと、を有する。前記演算処理部は、前記第1受光センサから出力される前記第1信号と前記第2受光センサから出力される前記第2信号とを比較して信号レベルが高い方の信号を選択し、選択された前記信号に基づいて前記車両の有無を判定する。
【0008】
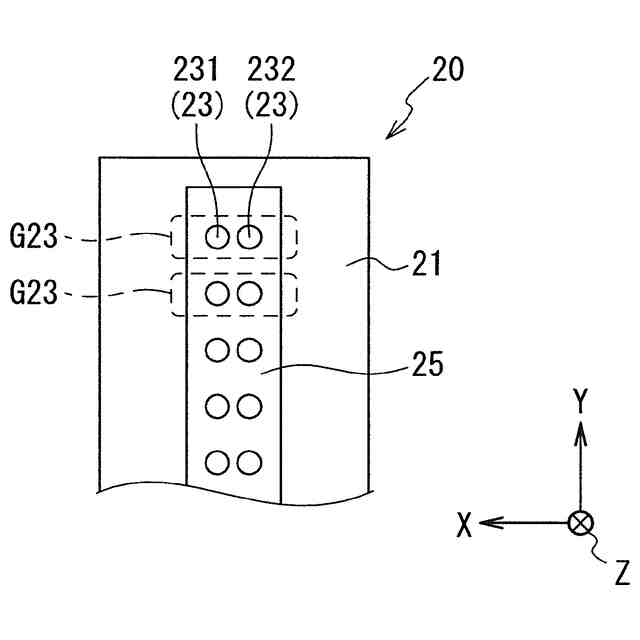
本発明の別の態様に係る車両検知装置は、車両を光学的に検知する車両検知装置であって、車両検知用の光を投光する投光器を備える。前記投光器は、第2筐体と、前記第2筐体の内部に配置される複数の光源と、前記第2筐体に取り付けられ、前記第2筐体の内部から外部へ前記光を導く第2光学窓と、を有する。前記複数の光源は、前記光を発する第1光源と、前記車両の進行方向に平行な第1方向で前記第1光源に隣り合って配置され、前記光を発する第2光源とを有する。前記第1方向における前記第1光源と前記第2光源との間の距離は、降雨時に前記第2光学窓に付着する水滴の予想される平均直径よりも大きい値に設定されている。
【発明の効果】
【0009】
本発明によれば、薄型化が可能であり、降雨時の水滴の影響を低減することが可能な車両検知装置を提供することが可能である。
【図面の簡単な説明】
【0010】
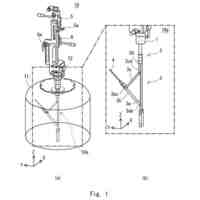
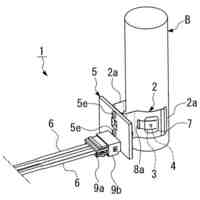
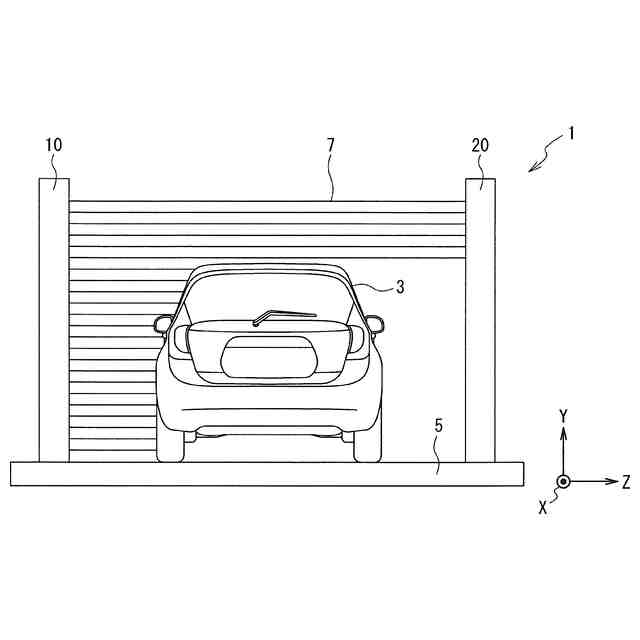
図1は、本発明の実施形態1に係る車両検知装置による車両検知のメカニズムを模式的に示す図である。
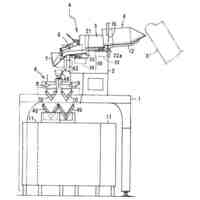
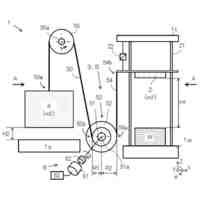
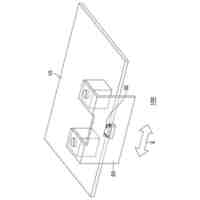
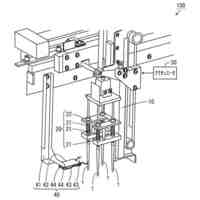
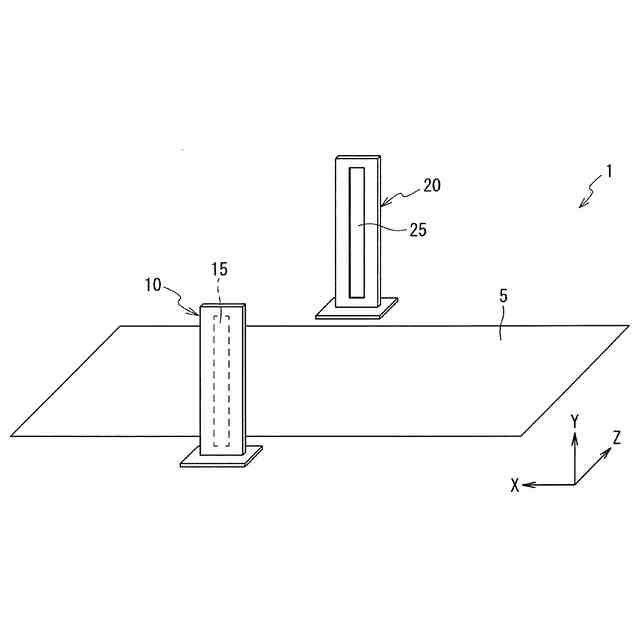
図2は、本発明の実施形態1に係る車両検知装置の構成例を示す外観図である。
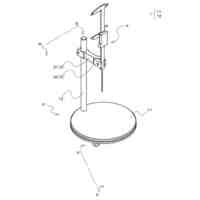
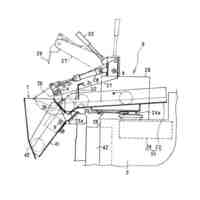
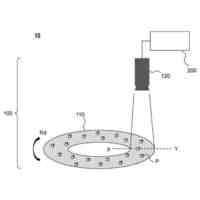
図3Aは、本発明の実施形態1に係る投光器の構成例を示す正面図である。
図3Bは、本発明の実施形態1に係る第1光源と第2光源との間の距離dh1を示す図である。
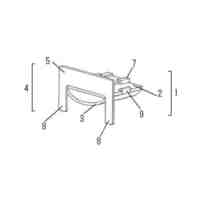
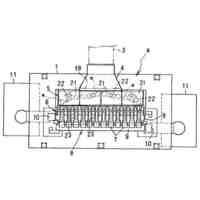
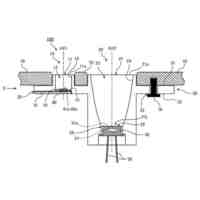
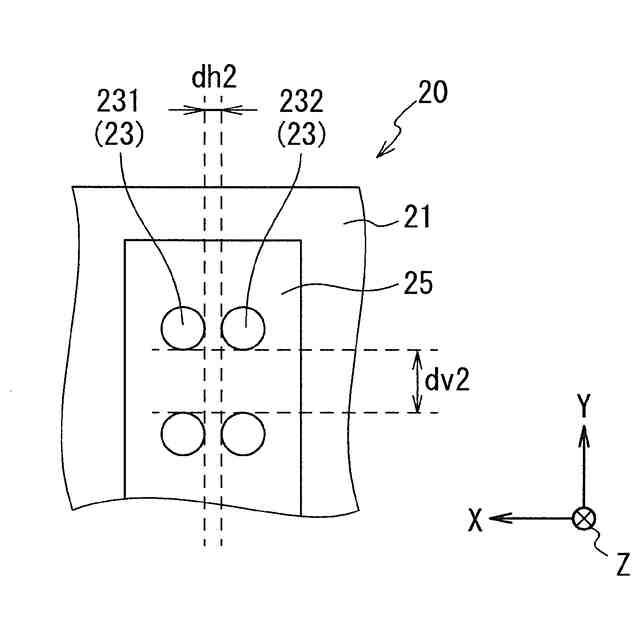
図4Aは、本発明の実施形態1に係る受光器の構成例を示す正面図である。
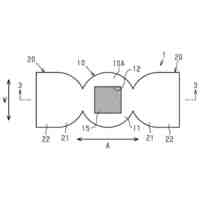
図4Bは、本発明の実施形態1に係る第1受光センサと第2受光センサとの間の距離dh2を示す図である。
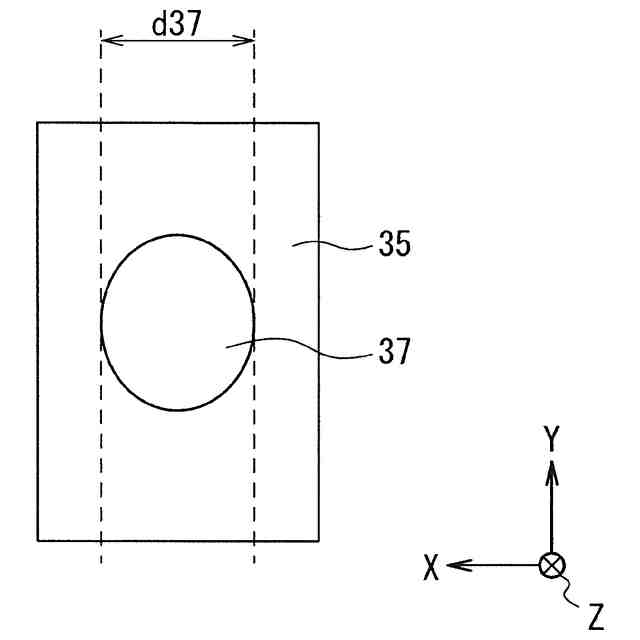
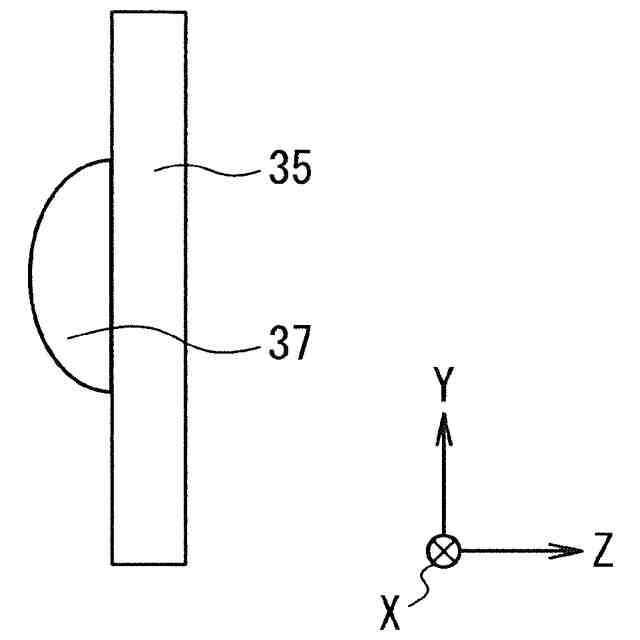
図5Aは、基板の表面に付着した水滴の拡がりを例示する正面図である。
図5Bは、基板の表面に付着した水滴の拡がりを例示する側面図である。
図6Aは、車両無し(水滴無し)の場合の第1信号及び第2信号の各信号レベルを例示するグラフである。
図6Bは、車両無し(水滴有り)の場合の第1信号及び第2信号の各信号レベルを例示するグラフである。
図7は、車両有り(水滴無し、水滴有り)の場合の第1信号及び第2信号の各信号レベルを例示するグラフである。
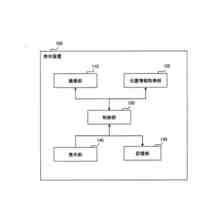
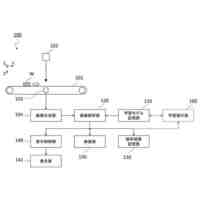
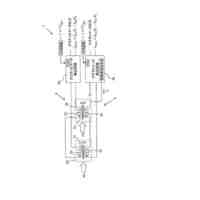
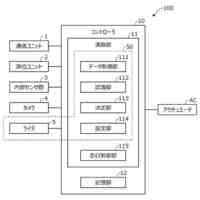
図8は、本発明の実施形態1に係る車両検知装置1の構成例を示すブロック図である。
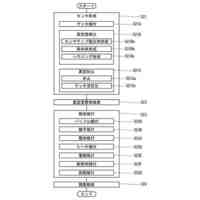
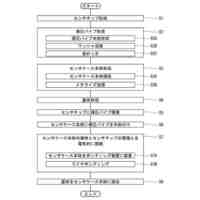
図9は、本発明の実施形態1に係る車両検知の処理フローの一例を示すフローチャートである。
図10は、本発明の実施形態1の変形例1に係る受光器を示す正面図である。
図11は、本発明の実施形態1の変形例2に係る受光器を示す正面図である。
図12は、本発明の実施形態1の変形例3に係る受光器を示す正面図である。
図13は、本発明の実施形態1の変形例4に係る投光器を示す正面図である。
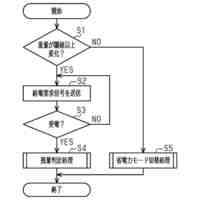
図14は、本発明の実施形態2に係る間欠動作の処理フローを示すフローチャートである。
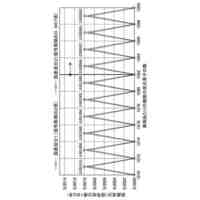
図15は、本発明の実施形態2において、受光器から出力される第1信号の信号レベルと第2信号の信号レベルとが実質同一と判定される場合の、第1信号の信号レベルと第2信号の信号レベルとを例示するグラフである。
図16は、本発明の実施形態2の変形例1に係る間欠動作の処理フローを示すフローチャートである。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
健康状態検査材
13日前
株式会社CCT
表示装置
12日前
株式会社トプコン
測量装置
18日前
株式会社トプコン
測量装置
18日前
株式会社チノー
放射温度計
5日前
日本精機株式会社
センサユニット
4日前
個人
コンベックスルール用測定部品
11日前
トヨタ自動車株式会社
給水治具
10日前
大和製衡株式会社
組合せ計量装置
3日前
東将精工株式会社
測定器具補助具
12日前
大和製衡株式会社
組合せ計量装置
3日前
大和製衡株式会社
組合せ計量装置
3日前
三菱マテリアル株式会社
温度センサ
10日前
株式会社ミツトヨ
光学式エンコーダ
13日前
東レエンジニアリング株式会社
衝撃試験機
13日前
中部電力株式会社
スミヤ濾紙
18日前
東レ株式会社
センサー素子及びガスセンサー
17日前
日立建機株式会社
作業機械
17日前
豊田合成株式会社
重量測定装置
10日前
トヨタ自動車株式会社
表示装置
4日前
株式会社ティアンドデイ
温度測定装置
10日前
株式会社 システムスクエア
検査装置
12日前
住友金属鉱山株式会社
検査装置
3日前
住友金属鉱山株式会社
セレン評価方法
3日前
ニシム電子工業株式会社
液位検出装置
4日前
アズビル株式会社
隔膜真空計の製造方法
18日前
笹田磁気計測研究所株式会社
磁気傾度計
5日前
アズビル株式会社
圧力センサの製造方法
18日前
株式会社ダイナックス
電流検出器
3日前
株式会社不二越
歯車寸法測定装置
12日前
本田技研工業株式会社
情報提供装置
18日前
トヨタ自動車株式会社
情報処理装置
4日前
株式会社島津製作所
分注装置
11日前
本田技研工業株式会社
外界認識装置
5日前
株式会社アイティーコスモス
センサシステム
3日前
株式会社トクヤマ
磁性粒子を用いた試料前処理方法
5日前
続きを見る
他の特許を見る

 特許ウォッチ
特許ウォッチ