TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024021713
公報種別
公開特許公報(A)
公開日
2024-02-16
出願番号
2022124746
出願日
2022-08-04
発明の名称
計測システム、計測方法、及び計測プログラム
出願人
公立大学法人大阪
代理人
個人
主分類
A61B
5/11 20060101AFI20240208BHJP(医学または獣医学;衛生学)
要約
【課題】計測精度の向上を図ることができる計測システム、計測方法、及び計測プログラムを提供する。
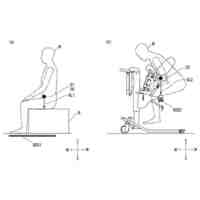
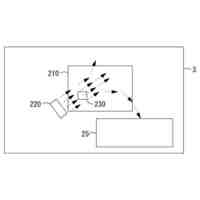
【解決手段】ユーザの動作を計測する計測システム100であって、取得部と、特定部と、算出部と、導出部と、補正部と、を備えることを特徴とする。前記取得部は、前記ユーザの下肢の経時変化に基づき検出された加速度データと、角速度データとを含む検出データを取得する。前記特定部は、前記検出データのうち、前記ユーザの支持期に対応する時間に検出された第1支持期データを特定する。前記算出部は、前記第1支持期データを参照し、[数1]に示す第1ピッチ角を算出する。前記導出部は、前記第1ピッチ角に基づき、前記検出データに対応する計測データを導出する。前記補正部は、前記計測データに基づき、前記第1ピッチ角を補正する。
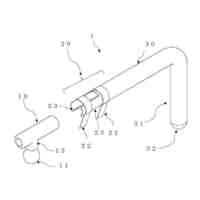
【選択図】図1
特許請求の範囲
【請求項1】
ユーザの動作を計測する計測システムであって、
前記ユーザの下肢の経時変化に基づき検出された加速度データと、角速度データとを含む検出データを取得する取得部と、
前記検出データのうち、前記ユーザの支持期に対応する時間に検出された第1支持期データを特定する特定部と、
前記第1支持期データを参照し、[数1]に示す第1ピッチ角を算出する算出部と、
前記第1ピッチ角に基づき、前記検出データに対応する計測データを導出する導出部と、
前記計測データに基づき、前記第1ピッチ角を補正する補正部と、
を備えること
を特徴とする計測システム。
TIFF
2024021713000015.tif
14
170
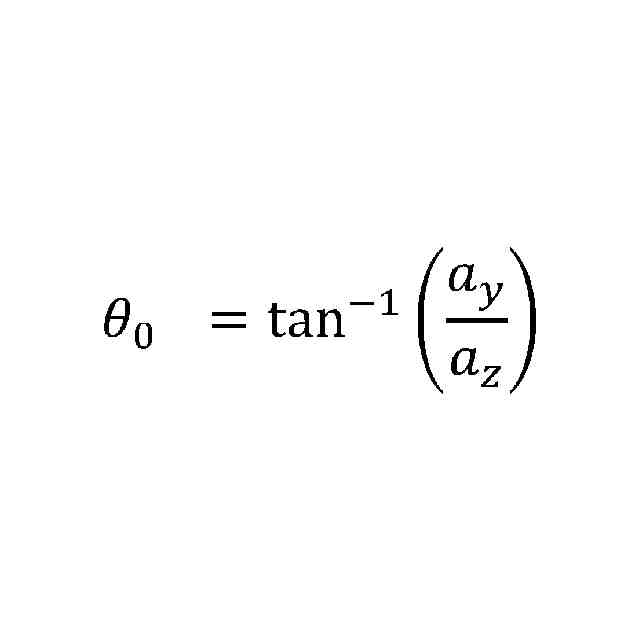
ここで、
θ
0
は、前記検出データを、ローカル座標からグローバル座標に変換する際に用いる前記第1ピッチ角を示し、
a
y
は、前記第1支持期データに含まれる加速度データのうち、前記ローカル座標におけるY方向の成分を示し、
a
z
は、前記第1支持期データに含まれる加速度データのうち、前記ローカル座標におけるZ方向の成分を示す。
続きを表示(約 3,100 文字)
【請求項2】
前記算出部は、前記第1支持期データを参照し、[数2]に示す第1ロール角を算出することを含み、
前記導出部は、
前記第1ピッチ角及び前記第1ロール角に基づき、[数3]に示すクォータニオンを算出することと、
前記クォータニオン及び前記検出データに基づき、[数4]を用いて前記第1支持期データを検出した時の第1検出時間から、再び前記支持期を検出した時の第2検出時間までを積分することで、前記計測データを導出することと、
を含み、
前記補正部は、前記計測データに基づき、[数5]を用いて前記第1ピッチ角を補正することを含むこと
を特徴とする請求項1記載の計測システム。
TIFF
2024021713000016.tif
15
170
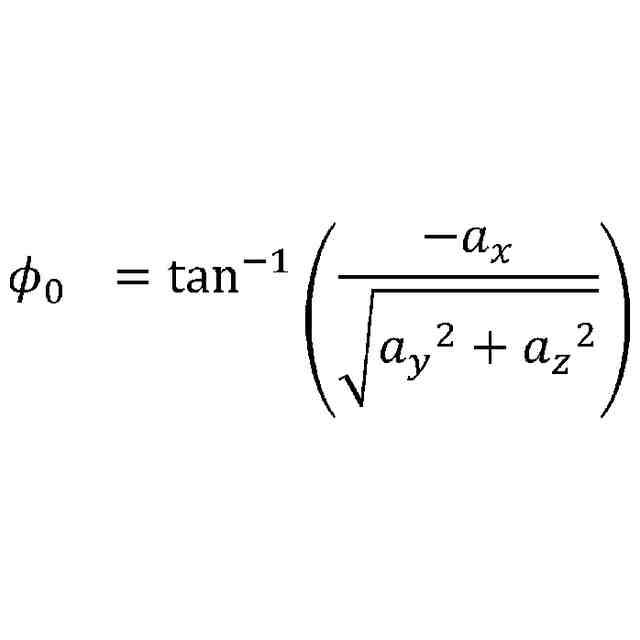
ここで、
φ
0
は、前記検出データを、前記ローカル座標から前記グローバル座標に変換する際に用いる前記第1ロール角を示し、
a
x
は、前記第1支持期データに含まれる加速度データのうち、前記ローカル座標におけるX方向の成分を示す。
TIFF
2024021713000017.tif
12
170
ここで、qは、前記検出データを、前記ローカル座標から前記グローバル座標に変換する際に用いる前記クォータニオンを示す。
TIFF
2024021713000018.tif
64
170
ここで、
iは、前記加速度データ及び前記角速度データを検出した時の検出時間を示し、
a
i
は、前記検出時間iに検出された加速度データを示し、
a(ハット)
i
は、前記検出時間iに検出され、前記グローバル座標に変換した加速度データを示し、
gは、重力加速度を示し、
ω
i
は、前記検出時間iに検出された角速度データを示し、
ω(ハット)
i
は、前記検出時間iに検出され、前記グローバル座標に変換した角速度データを示し、
ω(ハット)
i,α
(αはx、y、又はz)は、前記グローバル座標に変換した角速度データω(ハット)
i
における各方向の成分を示し、
v
i
は、前記検出時間iに対応する速度データを示し、
p
i
は、前記検出時間iに対応する前記計測データを示し、
q(ドット)は、前記クォータニオンqの時間微分を示す。
TIFF
2024021713000019.tif
16
170
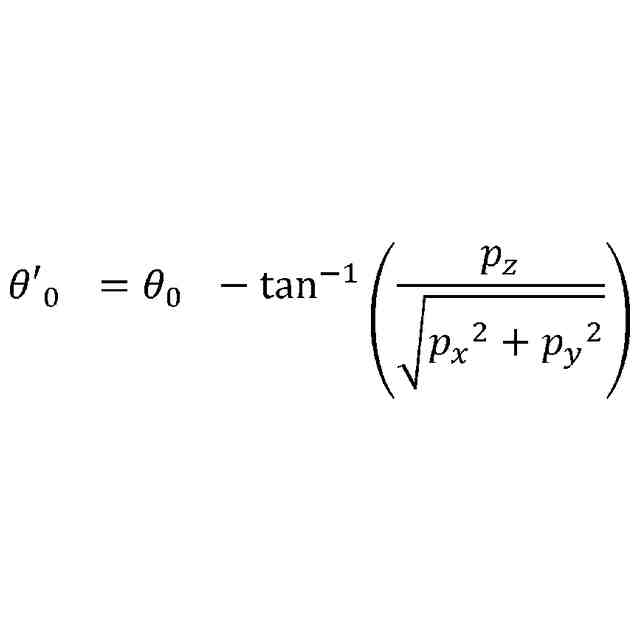
ここで、
θ´
0
は、前記第1ピッチ角θ
0
を補正した第1補正ピッチ角を示し、
p
X
は、前記計測データにおける幅手方向の成分を示し、
p
y
は、前記計測データにおける歩幅方向の成分を示し、
p
z
は、前記計測データにおける高さ方向の成分を示す。
【請求項3】
前記特定部は、前記ユーザの踵接地時から足趾離地時までの期間のうち、最小の加速度データを検出した時間を、前記支持期に対応する時間として特定すること
を特徴とする請求項1又は2記載の計測システム。
【請求項4】
前記補正部は、予め設定された閾値と、前記計測データにおける高さ方向の成分との比較に基づき、前記第1ピッチ角を補正するか否かを判定することを含むこと
を特徴とする請求項1又は2記載の計測システム。
【請求項5】
前記検出データは、
前記ユーザの右足の動きに対応する右足検出データと、
前記ユーザの左足の動きに対応する左足検出データと、
を含み、
前記導出部は、
前記右足検出データに対応する右足計測データ、及び
前記左足検出データに対応する左足計測データ
を含む前記計測データを導出することを含むこと
を特徴とする請求項1又は2記載の計測システム。
【請求項6】
前記右足計測データに基づく前記第1ピッチ角の補正度合いと、前記左足計測データに基づく前記第1ピッチ角の補正度合いと、を比較した結果を出力する出力部をさらに備えること
を特徴とする請求項5記載の計測システム。
【請求項7】
ユーザの動作を計測する計測方法であって、
前記ユーザの下肢の経時変化に基づき検出された加速度データと、角速度データとを含む検出データを取得する取得ステップと、
前記検出データのうち、前記ユーザの支持期に対応する時間に検出された第1支持期データを特定する特定ステップと、
前記第1支持期データを参照し、[数1]に示す第1ピッチ角を算出する算出ステップと、
前記第1ピッチ角に基づき、前記検出データに対応する計測データを導出する導出ステップと、
前記計測データに基づき、前記第1ピッチ角を補正する補正ステップと、
を備えること
を特徴とする計測方法。
TIFF
2024021713000020.tif
14
170
ここで、
θ
0
は、前記検出データを、ローカル座標からグローバル座標に変換する際に用いる前記第1ピッチ角を示し、
a
y
は、前記第1支持期データに含まれる加速度データのうち、前記ローカル座標におけるY方向の成分を示し、
a
Z
は、前記第1支持期データに含まれる加速度データのうち、前記ローカル座標におけるZ方向の成分を示す。
【請求項8】
ユーザの動作を計測する計測プログラムであって、
コンピュータに、
前記ユーザの下肢の経時変化に基づき検出された加速度データと、角速度データとを含む検出データを取得する取得ステップと、
前記検出データのうち、前記ユーザの支持期に対応する時間に検出された第1支持期データを特定する特定ステップと、
前記第1支持期データを参照し、[数1]に示す第1ピッチ角を算出する算出ステップと、
前記第1ピッチ角に基づき、前記検出データに対応する計測データを導出する導出ステップと、
前記計測データに基づき、前記第1ピッチ角を補正する補正ステップと、
を実行させること
を特徴とする計測プログラム。
TIFF
2024021713000021.tif
14
170
ここで、
θ
0
は、前記検出データを、ローカル座標からグローバル座標に変換する際に用いる前記第1ピッチ角を示し、
a
y
は、前記第1支持期データに含まれる加速度データのうち、前記ローカル座標におけるY方向の成分を示し、
a
Z
は、前記第1支持期データに含まれる加速度データのうち、前記ローカル座標におけるZ方向の成分を示す。
発明の詳細な説明
【技術分野】
【0001】
本発明は、計測システム、計測方法、及び計測プログラムに関する。
続きを表示(約 1,800 文字)
【背景技術】
【0002】
従来、ユーザの動作を計測する方法として、例えば特許文献1のような測定装置が提案されている。
【0003】
特許文献1では、測定装置の備える処理装置は、速度算出部と、位置算出部とを含む旨が開示されている。速度算出部は、加速度センサから加速度データを取得し、加速度データに基づいて速度データを導出し、補正区間の開始時刻における速度データの値を始点とし補正区間の終了時刻における速度データの値を終点とし線形である速度モデルを算出し、速度モデルの値と速度データの値との差分に基づいて速度データを補正して補正速度データを得る。位置算出部は、速度算出部から補正速度データを取得し、補正速度データに基づいて位置データを導出し、補正区間の開始時刻における位置データの値を始点とし補正区間の終了時刻における位置データの値を終点とし線形である位置モデルを算出し、位置モデルの値と位置データの値との差分に基づいて位置データを補正して補正位置データを得る。
【先行技術文献】
【特許文献】
【0004】
特開2021-148563号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
ここで、特許文献1では、速度モデルを用いて速度の補正を実施し、誤差の蓄積を防ぐ旨が開示されている。特に、特許文献1の開示技術では、速度データのうち時刻b
1
から時刻b
2
までの速度の値に対し、始点を時刻b
1
(開始時刻)における速度の値とし、終点を時刻b
2
(終了時刻)における速度の値とし、線形である速度モデルを算出することを前提としている。このため、速度データを導出する際に用いられる元データや、前処理等に起因する誤差については、考慮されていない。このため、位置データの誤差が発生する根本的な部分に対する補正ができず、計測精度の向上に結びつかない懸念が挙げられる。
【0006】
そこで本発明は、上述した問題点に鑑みて案出されたものであり、その目的とするところは、計測精度の向上を図ることができる計測システム、計測方法、及び計測プログラムを提供することにある。
【課題を解決するための手段】
【0007】
第1発明に係る計測システムは、ユーザの動作を計測する計測システムであって、前記ユーザの下肢の経時変化に基づき検出された加速度データと、角速度データとを含む検出データを取得する取得部と、前記検出データのうち、前記ユーザの支持期に対応する時間に検出された第1支持期データを特定する特定部と、前記第1支持期データを参照し、[数1]に示す第1ピッチ角を算出する算出部と、前記第1ピッチ角に基づき、前記検出データに対応する計測データを導出する導出部と、前記計測データに基づき、前記第1ピッチ角を補正する補正部と、を備えることを特徴とする。
【0008】
TIFF
2024021713000002.tif
14
170
【0009】
ここで、θ
0
は、前記検出データを、ローカル座標からグローバル座標に変換する際に用いる前記第1ピッチ角を示し、a
y
は、前記第1支持期データに含まれる加速度データのうち、前記ローカル座標におけるY方向の成分を示し、a
Z
は、前記第1支持期データに含まれる加速度データのうち、前記ローカル座標におけるZ方向の成分を示す。
【0010】
第2発明に係る計測システムは、第1発明において、前記算出部は、前記第1支持期データを参照し、[数2]に示す第1ロール角を算出することを含み、前記導出部は、前記第1ピッチ角及び前記第1ロール角に基づき、[数3]に示すクォータニオンを算出することと、前記クォータニオン及び前記検出データに基づき、[数4]を用いて前記第1支持期データを検出した時の第1検出時間から、再び前記支持期を検出した時の第2検出時間までを積分することで、前記計測データを導出することと、を含み、前記補正部は、前記計測データに基づき、[数5]を用いて前記第1ピッチ角を補正することを含むことを特徴とする。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
個人
段差昇降装置
2か月前
個人
逆流防止用具
2か月前
個人
X線用貼付剤
3か月前
個人
エアリフター
2か月前
個人
シミ皮膚改善剤
3か月前
個人
肩甲骨下制器具
4か月前
個人
鼻腔拡張具
1か月前
個人
電動式孫の手
2か月前
株式会社コーセー
組成物
2か月前
個人
アーシング青竹踏台
3か月前
個人
透析装置の洗浄方法
4か月前
個人
透析装置の洗浄方法
1か月前
株式会社東亜産業
温熱具
2か月前
個人
光脱毛器
2か月前
個人
根管治療用のファイル
1か月前
個人
マッサージガン保持具
21日前
株式会社コロナ
サウナ装置
3か月前
個人
弾性材一体コルセット
1か月前
個人
医療用チューブ保護具
3か月前
株式会社ニデック
検眼装置
1か月前
株式会社いうら
介助リフト
27日前
株式会社ダリヤ
酸性染毛料
2か月前
オンキヨー株式会社
聴診器
1か月前
個人
健康装身具
20日前
株式会社ダリヤ
化粧料組成物
4か月前
大正製薬株式会社
外用組成物
3か月前
オンキヨー株式会社
電子機器
2か月前
オンキヨー株式会社
電子機器
2か月前
住友精化株式会社
乳化組成物
1か月前
オンキヨー株式会社
電子機器
2か月前
大正製薬株式会社
固形組成物
1か月前
株式会社ノエビア
シワ改善剤
28日前
個人
つぼ刺激用テープ
2か月前
株式会社ダリヤ
洗浄剤組成物
3か月前
株式会社東洋新薬
皮膚外用剤
27日前
株式会社ニデック
OCT装置
1か月前
続きを見る
他の特許を見る






 特許ウォッチ
特許ウォッチ