TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2024000992
公報種別
公開特許公報(A)
公開日
2024-01-09
出願番号
2023100585
出願日
2023-06-20
発明の名称
制御装置、制御方法及びプログラム
出願人
国立大学法人広島大学
代理人
個人
主分類
G05B
13/02 20060101AFI20231226BHJP(制御;調整)
要約
【課題】極値の探索に要する時間を短縮することができる制御装置、制御方法及びプログラムを提供する。
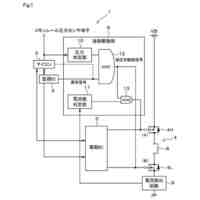
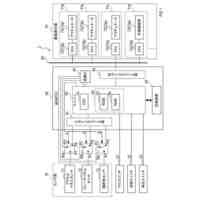
【解決手段】制御装置1は、制御対象であるシステム21の出力yに基づいて、システム21の評価指標νの極値を演算して、システム21の入力変数θを調整する制御部12と、出力y、システム21の状態を表す状態変数x及び評価指標νに影響を与える環境変数zのうち少なくとも環境変数zを含む情報ベクトルφと、評価指標νの勾配情報ξと、入力変数θとを含む複数のデータセットΦを格納するデータベース14と、勾配情報ξに基づいてシステム21の特性が変動したか否かを判定する特性変動判定部13と、入力変数θの演算条件を修正する更新パラメータを演算する更新パラメータ演算部15と、を備える。システム21の特性が変動した場合、制御部12は、データベース14に基づいて演算された更新パラメータに基づいて入力変数θを調整する。
【選択図】図1
特許請求の範囲
【請求項1】
制御対象であるシステムの出力に基づいて、前記システムの特性を表す評価指標の極値を演算して、前記システムの入力変数を調整する制御部と、
前記出力、前記システムの状態を表す状態変数及び前記評価指標に影響を与える環境変数のうち少なくとも前記環境変数を含む情報ベクトルと、前記評価指標の勾配情報と、前記入力変数とを含む複数のデータセットを格納するデータベースと、
前記勾配情報に基づいて、前記システムの特性が変動したか否かを判定する特性変動判定部と、
前記入力変数の演算条件を修正する更新パラメータを演算する更新パラメータ演算部と、を備え、
前記特性変動判定部において前記システムの特性が変動したと判定された場合、
前記更新パラメータ演算部は、前記データベースに基づいて前記更新パラメータを演算し、
前記制御部は、前記更新パラメータに基づいて前記入力変数を調整する、
ことを特徴とする制御装置。
続きを表示(約 1,400 文字)
【請求項2】
前記制御部は、
前記更新パラメータに基づいて、前時刻ステップの前記入力変数を更新し、更新された前記前時刻ステップの前記入力変数に基づいて現在時刻ステップの前記入力変数を演算する、
ことを特徴とする請求項1に記載の制御装置。
【請求項3】
前記更新パラメータ演算部は、
前記データベースに格納されている前記データセットの前記情報ベクトルと、現在時刻ステップの前記情報ベクトルとの距離に基づいて近傍データセットを選択し、前記近傍データセットに基づいて前記更新パラメータを演算する、
ことを特徴とする請求項1又は2に記載の制御装置。
【請求項4】
前記更新パラメータ演算部は、
前記データベースに記憶されている前記データセットを、前記勾配情報が小さい順にソートして、
前記近傍データセットを選択する、
ことを特徴とする請求項3に記載の制御装置。
【請求項5】
前記制御部は、
前記勾配情報が所定の閾値以上であった場合、現在時刻ステップの前記データセットを前記データベースに格納する、
ことを特徴とする請求項1に記載の制御装置。
【請求項6】
前記制御部は、前記入力変数に入力される摂動信号の振幅を調整する振幅調整手段を備え、
前記振幅調整手段は、前記勾配情報の大きさと正の相関を有するように、前記摂動信号の振幅の大きさを調整する、
ことを特徴とする請求項1に記載の制御装置。
【請求項7】
制御対象であるシステムの出力に基づいて、前記システムの特性を表す評価指標の極値を演算して、前記システムの入力変数を調整する制御方法において、
前記評価指標の勾配情報に基づいて、前記システムの特性が変動したか否かを判定し、
前記システムの特性が変動したと判定された場合、前記出力、前記システムの状態を表す状態変数及び前記評価指標に影響を与える環境変数のうち少なくとも前記環境変数を含む情報ベクトルと、前記勾配情報と、前記入力変数とを含む複数のデータセットを格納するデータベースに基づいて、前記入力変数の演算条件を修正する更新パラメータを演算し、演算された前記更新パラメータに基づいて前記入力変数を演算する、
ことを特徴とする制御方法。
【請求項8】
コンピュータを、
制御対象であるシステムの出力、前記システムの状態を表す状態変数及び前記システムの特性を表す評価指標に影響を与える環境変数のうち少なくとも前記環境変数を含む情報ベクトルと、前記評価指標の勾配情報と、前記システムの入力変数とを含む複数のデータセットを格納するデータベース、
前記出力に基づいて前記評価指標の極値を演算して、前記入力変数を調整する制御部、
前記制御部で演算された前記評価指標の勾配情報に基づいて、前記システムの特性が変動したか否かを判定する特性変動判定部、
前記特性変動判定部において前記システムの特性が変動したと判定された場合、前記データベースに基づいて、前記制御部における前記入力変数の演算条件を修正する更新パラメータを演算する更新パラメータ演算部、
として動作させるプログラム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、データベースを用いた極値探索制御法による制御装置、制御方法及びプログラムに関する。
続きを表示(約 1,500 文字)
【背景技術】
【0002】
近年、極値制御を用いた制御装置、制御方法が種々開発されている。極値制御は、制御対象のモデルを用いることなく、制御対象とするシステムの評価関数の値を最大又は最小に維持することにより制御を行うため、システムが未知のパラメータを含む場合であっても制御を行うことが可能である。
【0003】
また、制御対象となるシステムの多くは非線形性や時変性を有しており、最適点が時間や動作条件によって変動する可能性がある。このようなシステムに対して評価関数を最大化するような目標値を探索する手法として、摂動法による極値探索制御法がある。摂動法では、評価関数の導関数を直接的に用いる必要がなく、システムへの入力信号に摂動信号を加えることで極値探索を行う。したがって、導関数を求めることが困難な非線形システムに対しても適用できる。例えば、特許文献1では、極値制御を用いた最大電力追従制御装置が提案されている。
【先行技術文献】
【特許文献】
【0004】
特開2015-102876号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
極値制御では、一般的に勾配法によって逐次的に評価関数の極値探索が行われており、極値探索の精度、効率等が制御性能に大きな影響を与える。特許文献1では、評価関数の傾きに基づいて摂動信号を切り替えることにより、極値探索の精度を高めることとしている。
【0006】
しかしながら、勾配法による逐次的な極値探索では、極値の探索に時間がかかり、探索中の非最適運転による損失が大きくなってしまう。
【0007】
本発明は、上述の事情に鑑みてなされたものであり、極値の探索に要する時間を短縮することができる制御装置、制御方法及びプログラムを提供することを目的とする。
【課題を解決するための手段】
【0008】
上記目的を達成するために、この発明の第1の観点に係る制御装置は、
制御対象であるシステムの出力に基づいて、前記システムの特性を表す評価指標の極値を演算して、前記システムの入力変数を調整する制御部と、
前記出力、前記システムの状態を表す状態変数及び前記評価指標に影響を与える環境変数のうち少なくとも前記環境変数を含む情報ベクトルと、前記評価指標の勾配情報と、前記入力変数とを含む複数のデータセットを格納するデータベースと、
前記勾配情報に基づいて、前記システムの特性が変動したか否かを判定する特性変動判定部と、
前記入力変数の演算条件を修正する更新パラメータを演算する更新パラメータ演算部と、を備え、
前記特性変動判定部において前記システムの特性が変動したと判定された場合、
前記更新パラメータ演算部は、前記データベースに基づいて前記更新パラメータを演算し、
前記制御部は、前記更新パラメータに基づいて前記入力変数を調整する。
【0009】
また、前記制御部は、
前記更新パラメータに基づいて、前時刻ステップの前記入力変数を更新し、更新された前記前時刻ステップの前記入力変数に基づいて現在時刻ステップの前記入力変数を演算する、
こととしてもよい。
【0010】
また、前記更新パラメータ演算部は、
前記データベースに格納されている前記データセットの前記情報ベクトルと、現在時刻ステップの前記情報ベクトルとの距離に基づいて近傍データセットを選択し、前記近傍データセットに基づいて前記更新パラメータを演算する、
こととしてもよい。
(【0011】以降は省略されています)
この特許をJ-PlatPatで参照する
関連特許
国立大学法人広島大学
共重合体、共重合体の製造方法及び回収方法
2日前
国立大学法人広島大学
シリコン量子ドット前駆体、シリコン量子ドット、及びシリコン量子ドットを用いたLED装置、並びに、シリコン量子ドット前駆体の製造方法、シリコン量子ドットの製造方法、及びシリコン量子ドットを用いたLED装置の製造方法
9日前
株式会社クボタ
作業車
2か月前
アズビル株式会社
流量制御装置
1か月前
アズビル株式会社
電圧出力回路
1か月前
株式会社エクセディ
作業ロボット
9日前
ミネベアミツミ株式会社
入力装置
21日前
トヨタ自動車株式会社
自動走行搬送車
29日前
三菱電機株式会社
移動体制御装置
8日前
エイブリック株式会社
ボルテージレギュレータ
29日前
株式会社クボタ
故障診断装置
28日前
株式会社クボタ
操作機構及び作業車
2か月前
岩田工機株式会社
加工装置
8日前
株式会社デンソー
制御装置
1か月前
株式会社デンソー
制御装置
1か月前
リックス株式会社
状態検出装置
24日前
日本プラスト株式会社
節度感付加装置
1か月前
株式会社GSユアサ
電力変換装置
1か月前
村田機械株式会社
搬送車システム
14日前
株式会社デンソー
減圧弁制御装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社オリジン
電源装置
1か月前
株式会社デンソー
電子制御装置
2か月前
川崎重工業株式会社
要因分析装置及び要因分析方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
THK株式会社
編集装置及び編集方法
1か月前
日置電機株式会社
信号出力装置および抵抗測定装置
2日前
日本精工株式会社
制御システムおよび制御方法
2日前
東洋電装株式会社
移動検出装置および鞍乗車両
1か月前
国立大学法人 名古屋工業大学
パラメータ探索空間算出方法
1か月前
日本精工株式会社
制御システムおよび制御方法
2日前
株式会社ディスコ
加工装置
1か月前
日本精工株式会社
制御システムおよび制御方法
2日前
株式会社FUJI
暖機運転システムを備えた工作機械
1か月前
日本精工株式会社
制御システムおよび制御方法
2日前
村田機械株式会社
走行車システム
1か月前
続きを見る
他の特許を見る







 特許ウォッチ
特許ウォッチ