TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2023042527
公報種別
公開特許公報(A)
公開日
2023-03-27
出願番号
2022071358
出願日
2022-04-25
発明の名称
データドライブの能動配電網異常状態検知方法及びシステム
出願人
山東大学
,
SHANDONG UNIVERSITY
代理人
個人
主分類
G06N
20/00 20190101AFI20230317BHJP(計算;計数)
要約
【課題】データセットの利用効率を向上し、異常状態の予測精度を向上し、予測誤差を低減するデータドライブの能動配電網異常状態検知方法及びシステムを提供する。
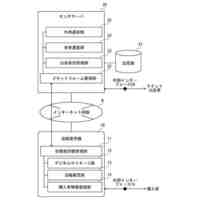
【解決手段】方法は、配電網異常状態発生後のノードパラメータデータを取得し、データを訓練済みの配電網異常状態予測モデルに入力して、配電網異常状態予測結果を出力し、配電網履歴異常状態ノードパラメータデータをクラスタリングし、相関ルールアルゴリズムにより、配電網異常状態タイプと強い相関を有するデータサンプルを見つけて、訓練用のサンプルデータセットを形成し、サンプルデータセットに基づいて配電網異常状態予測モデルの訓練を行い、三層データマイニング構造を用いて、データ分類と相関ルールにより、対応する故障タイプと強い相関を有するデータサンプルを抽出して取得する。
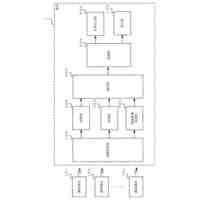
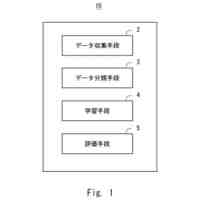
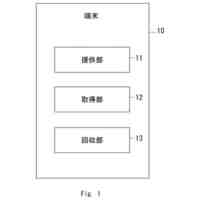
【選択図】図1
特許請求の範囲
【請求項1】
データドライブの能動配電網異常状態検知方法であって、配電網異常状態発生後のノードパラメータデータを取得し、前記データを訓練済みの配電網異常状態予測モデルに入力して、配電網異常状態予測結果を出力するステップを含み、
前記配電網異常状態予測モデルの訓練工程は、
配電網履歴異常状態ノードパラメータデータをクラスタリングし、クラスタリング後のデータサンプルを自己エンコードし、第1サンプルデータセットを形成するステップであって、第1サンプルデータセットにおける元素はベクトルであり、各ベクトルはTV及びF
i
から構成され、TV={N0C
1
,N0C
2
,...,N0C
a
}は自己エンコーディング後のデータであり、C値の範囲は[1, K]であり、Kはクラスタリング数であり、aはデータ収集が行われるノード番号であり、F
i
は異常状態タイプの値であり、前記自己エンコーディング後のデータは少なくともデータの位置するノード位置情報とデータの属するクラスタリングカテゴリ情報を含むステップと、
相関ルールアルゴリズムにより、配電網異常状態タイプと強い相関を有するデータサンプルを見つけて、訓練用のサンプルデータセットを形成するステップであって、具体的に、第1サンプルデータセットにおける各ベクトルのTV及びF
i
の2種類元素を1種類元素として併合し、新たなデータセットM:{Z
1
,Z
2
,…,Z
i
}を構成し、Z
i
は1つの自己エンコーディング後のデータと対応する異常状態タイプとからなる新たなベクトルを表し、iは新たなベクトルの数であり、頻繁なアイテムセットの支持度及び信頼度を用いて前記新たなベクトルのうちの2つ又は複数の元素の間の繋がりを数値化し、支持度及び信頼度要求を満たす非0ベクトルを抽出して、訓練用のサンプルデータセットである第2サンプルデータセットを形成することを含むステップと、
前記訓練用のサンプルデータセットに基づいて前記配電網異常状態予測モデルの訓練を行うステップであって、
前記配電網異常状態予測モデルは、具体的に、
JPEG
2023042527000027.jpg
22
139
であり、
ただし、wは予測モデル関数の重みベクトルであり、bは予測モデル関数のインターセプトを表し、w
T
(CV
j
)はベクトルwとベクトルCV
j
のスカラー積を表し、ベクトルCV
j
は訓練サンプルであるステップと、
目的関数を最適化することによって前記配電網異常状態予測モデルのフィット度を測定するステップであって、前記目的関数の最適化は具体的に、
JPEG
2023042527000028.jpg
28
170
であり、
ただし、L(F
i
,f(CV
j
))はロス関数を表し、αがハイパーパラメータで設定値であり、R(w)は正則化項であり、nはサンプルデータセット総量であり、F
i
は異常状態タイプの値であるステップと、
得られたサンプルデータセットに基づいて、確率的勾配降下アルゴリズムを用いて回帰訓練を行い、配電網異常状態予測モデルの最適なパラメトリック解を取得するステップであって、確率的勾配降下アルゴリズムは毎回に一部分テストセットを利用して反復算出し、反復する時に、モデルパラメータは下記の式で更新され、
JPEG
2023042527000029.jpg
26
170
ただし、ηは、経時的な学習率であり、算出式としては、
JPEG
2023042527000030.jpg
37
142
であり、
ただし、tはタイムステップであり、t
0
は始まる時間であるステップと、を含む、
ことを特徴とするデータドライブの能動配電網異常状態検知方法。
続きを表示(約 2,000 文字)
【請求項2】
配電網履歴異常状態ノードパラメータデータをクラスタリングする前記工程は、具体的に、
ユークリッド距離に基づいてデータサンプルを分類するステップと、
判別関数によってデータサンプルクラスタリングが完成したか否かを判断するステップと、
誤差二乗和を算出し、SSE-Kグラフによって参照されるクラスタリング数を特定し、前記参照されるクラスタリング数に基づいて最終的なクラスタリング数を特定するステップと、を含む、
ことを特徴とする請求項1に記載のデータドライブの能動配電網異常状態検知方法。
【請求項3】
データドライブの能動配電網異常状態感知システムであって、
配電網異常状態発生後のノードパラメータデータを取得するためのデータ取得モジュールと、
前記データを訓練済みの配電網異常状態予測モデルに入力し、配電網異常状態予測結果を出力する異常状態予測モジュールと、を含み、
前記配電網短絡異常状態モデルの訓練工程は、
配電網履歴異常状態ノードパラメータデータをクラスタリングし、クラスタリング後のデータサンプルを自己エンコードし、第1サンプルデータセットを形成するステップであって、第1サンプルデータセットにおける元素はベクトルであり、各ベクトルはTV及びF
i
から構成され、TV={N0C
1
,N0C
2
,...,N0C
a
}は自己エンコーディング後のデータであり、C値の範囲は[1, K]であり、Kはクラスタリング数であり、aはデータ収集が行われるノード番号であり、F
i
は異常状態タイプの値であり、前記自己エンコーディング後のデータは少なくともデータの位置するノード位置情報とデータの属するクラスタリングカテゴリ情報を含むステップと、
相関ルールアルゴリズムにより、配電網異常状態タイプと強い相関を有するデータサンプルを見つけて、訓練用のサンプルデータセットを形成するステップであって、具体的に、第1サンプルデータセットにおける各ベクトルのTV及びF
i
の2種類元素を1種類元素として併合し、新たなデータセットM:{Z
1
,Z
2
,…,Z
i
}を構成し、Z
i
は1つの自己エンコーディング後のデータと対応する異常状態タイプとからなる新たなベクトルを表し、iは新たなベクトルの数であり、頻繁なアイテムセットの支持度及び信頼度を用いて前記新たなベクトルのうちの2つ又は複数の元素の間の繋がりを数値化し、支持度及び信頼度要求を満たす非0ベクトルを抽出して、訓練用のサンプルデータセットである第2サンプルデータセットを形成することを含むステップと、
前記訓練用のサンプルデータセットに基づいて前記配電網異常状態予測モデルの訓練を行うステップであって、
前記配電網異常状態予測モデルは、具体的に、
JPEG
2023042527000031.jpg
23
146
であり、
ただし、wは予測モデル関数の重みベクトルであり、bは予測モデル関数のインターセプトを表し、w
T
(CV
j
)はベクトルwとベクトルCV
j
のスカラー積を表し、ベクトルCV
j
は訓練サンプルであるステップと、
目的関数を最適化することによって前記配電網異常状態予測モデルのフィット度を測定するステップであって、前記目的関数の最適化は具体的に、
JPEG
2023042527000032.jpg
31
170
であり、
ただし、L(F
i
,f(CV
j
))はロス関数を表し、αはハイパーパラメータで設定値であり、R(w)は正則化項であり、nはサンプルデータセット総量であり、F
i
は異常状態タイプの値であるステップと、
得られたサンプルデータセットに基づいて、確率的勾配降下アルゴリズムを用いて回帰訓練を行い、配電網異常状態予測モデルの最適なパラメトリック解を取得するステップであって、確率的勾配降下アルゴリズムは毎回に一部分テストセットを利用して反復算出し、反復する時に、モデルパラメータは下記の式で更新され、
JPEG
2023042527000033.jpg
25
170
ただし、ηは、経時的な学習率であり、算出式としては、
であり、
ただし、tはタイムステップであり、t
0
は始まる時間であるステップと、を含む、
ことを特徴とするデータドライブの能動配電網異常状態感知システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、配電網異常状態分類及び予測技術分野に関し、特にデータドライブの能動配電網異常状態検知方法及びシステムに関する。
続きを表示(約 2,000 文字)
【背景技術】
【0002】
本部分の説明は、本発明に関連する背景技術を提供するだけであり、従来技術を必然的に構成するものではない。
【0003】
能動配電網知能リアルタイム監視の深化に伴い、監視・保護装置は能動配電網に多く取り付けられ、これらの装置によって電網運転状態データを収集し、データ分析処理から、能動配電網の運転状態が正常であるか否かを判断する。しかし、このような診断方案は、監視装置の設置のために多くのコストがかかると同時に、診断精度が低いという問題がある。
【0004】
上記従来の故障診断方案の問題を回避するために、人工知能は自己学習や自己最適化という利点に頼んで、能動配電網短絡故障、断線故障や過負荷等の異常状態の診断に用いられる。一般的な故障診断方法としては、エキスパートシステム、ファジー理論、人工ニューラルネットワーク、ベイジアンネットワーク、及びペトリネットワーク等の方法がある。エキスパートシステムに基づく故障診断方法では、能動配電網の運転状態等のデータを用いて、エキスパートの経験知識と合わせて、エキスパートモデルを構築して、故障タイプを推論する。ファジィー理論に基づく診断方法では、ファジィー制御によって任意の非線形連続関数の近似シミュレーションを実現する。人工ニューラルネットワークに基づく診断方法では、人間の脳や自然のニューラルネットワークを模倣し、既存の履歴データをモデル化し、関連パラメータの訓練を完了し、問題の解決セットを取得する。ペトリネットワークに基づく診断手法では、複雑な情報ベースが必要なく、離散的な動的能動配電網故障を効果的に処理することができるが、フォールトトレランスが低いという問題がある。
【0005】
能動配電網の規模が非常に大きく、故障データが多い場合に、故障データに対する分析効果は、アルゴリズムの選択に大幅に依存する。そして、現在の人工知能が取り入れた故障診断方案は、いつも単一の人工知能アルゴリズムやモデルのみを採用し、その診断精度に向上する余裕があり、且つフォールトトレランスが低く、エキスパートの経験に強く依存するなどの制限がある。
【発明の概要】
【0006】
上記課題を解決するために、本発明は、三層データマイニングを用いて能動配電網異常状態に対して分類及び予測を行って、異常状態分類及び予測の精度が低く時間が長い問題を対応的に解決することができるデータドライブの能動配電網異常状態検知方法及びシステムが抽出される。
【0007】
上記目的を実現するために、いくつかの実施形態において、下記の技術的解決策を採用する。
【0008】
データドライブの能動配電網異常状態検知方法であって、
配電網異常状態発生後のノードパラメータデータを取得し、前記データを訓練済みの配電網異常状態予測モデルに入力して、配電網異常状態予測結果を出力するステップを含み、
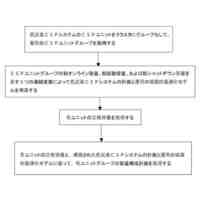
前記配電網異常状態予測モデルの訓練工程は、配電網履歴異常状態ノードパラメータデータをクラスタリングし、相関ルールアルゴリズムにより、配電網異常状態タイプと強い相関を有するデータサンプルを見つけて、訓練用のサンプルデータセットを形成するステップと、前記サンプルデータセットに基づいて前記配電網異常状態予測モデルの訓練を行うステップとを含む。
【0009】
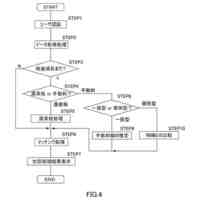
さらなる解決策として、配電網履歴異常状態ノードパラメータデータをクラスタリングする前記工程は、具体的に、
ユークリッド距離に基づいてデータサンプルを分類するステップと、
判別関数によってデータサンプルクラスタリングが完成したか否かを判断するステップと、
誤差二乗和を算出し、SSE-Kグラフによって参照されるクラスタリング数を特定し、前記参照されるクラスタリング数に基づいて最終的なクラスタリング数を特定するステップと、を含む。
【0010】
さらなる解決策として、配電網履歴異常状態ノードパラメータデータをクラスタリングした後に、
クラスタリング後のデータサンプルを自己エンコードし、第1サンプルデータセットを形成するステップをさらに含み、第1サンプルデータセットにおける元素はベクトルであり、各ベクトルはTV及びF
i
から構成され、(ただし、TV={N0C
1
,N0C
2
,...,N0C
a
}は自己コーディング後のデータであり、C値の範囲は[1, K]であり、aはデータ収集が行われるノード番号であり、F
i
は異常状態タイプの値である)、
前記自己コーディング後のデータは、少なくともデータの位置するノード位置情報及びデータの属するクラスタリングカテゴリ情報を含む。
(【0011】以降は省略されています)
特許ウォッチbot のツイートを見る
この特許をJ-PlatPatで参照する
関連特許
山東大学
高歪率ナノ圧痕試験装置及び方法
6か月前
山東大学
半導体加工ウェーハ超音波浮揚駆動装置
4か月前
山東大学
アルカリ刺激再生微粉末ソイルセメント及びその製造方法
11か月前
山東大学
データドライブの能動配電網異常状態検知方法及びシステム
13か月前
山東大学
クラスタ学習に基づく低炭素CSPシステム協調的最適化方法及び装置
13か月前
山東大学
テルビウム・アルミニウム・ガリウム・ガーネット光磁気結晶に基づくファラデー光磁気アイソレータ
5か月前
青島理工大学
組立ロボットの遠隔操作環境のデジタルツインモデリング方法及びシステム
9か月前
個人
乗降調査装置
19日前
個人
管理装置
3日前
個人
自動販売機
26日前
日本精機株式会社
投影装置
19日前
個人
リユース統合システム
1か月前
日本精機株式会社
投影システム
20日前
個人
チラシ掲載位置表示システム
1か月前
株式会社SUBARU
車両
27日前
小林クリエイト株式会社
RFタグ
26日前
17LIVE株式会社
サーバ
19日前
株式会社協同印刷
防災・災害マウス
1か月前
株式会社ゼロボード
価格決定システム
18日前
太陽誘電株式会社
触覚生成装置
1か月前
トヨタ自動車株式会社
検査装置
3日前
株式会社フォーバル
仕訳システム
1か月前
株式会社アジラ
姿勢推定システム
17日前
株式会社イトーキ
分析装置
1か月前
株式会社カネカ
異常推定システム
1か月前
株式会社NGA
画像投稿システム
3日前
日本信号株式会社
自転車貸出システム
20日前
個人
言語翻訳システム及びプログラム
10日前
株式会社小野測器
移動量計測システム
10日前
小林クリエイト株式会社
あて先表示システム
26日前
日本電気株式会社
勤務管理装置
25日前
個人
ブロックチェーンと既存網との接続方法
1か月前
日本電気株式会社
端末及び認証システム
20日前
富士通株式会社
プロセッサ
12日前
NISSHA株式会社
指装着型コントローラー
25日前
日本信号株式会社
所持物検査装置
24日前
続きを見る
他の特許を見る










 特許ウォッチ
特許ウォッチ