TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177437
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084277
出願日
2024-05-23
発明の名称
管制システム
出願人
Astemo株式会社
代理人
弁理士法人平木国際特許事務所
主分類
G08G
1/00 20060101AFI20251128BHJP(信号)
要約
【課題】自動運転車両と作業員とが混在するエリアに導入された自動運転システム全体の生産性の低下を抑止すると共に、作業員の安全を確保することを目的とする。
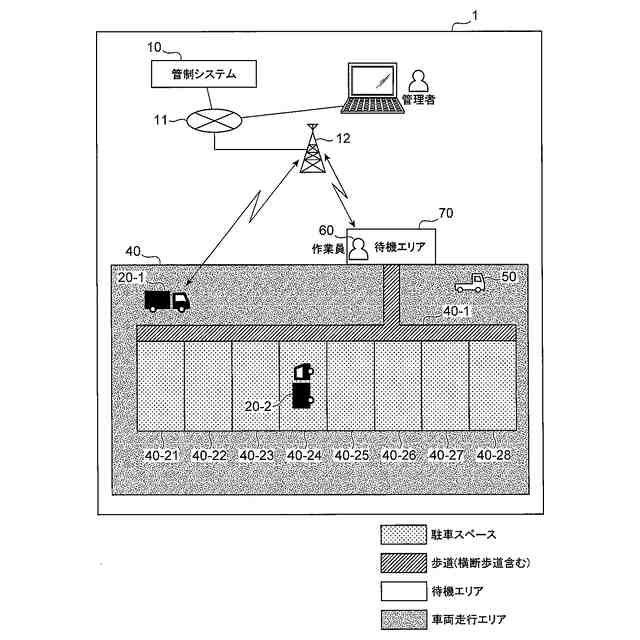
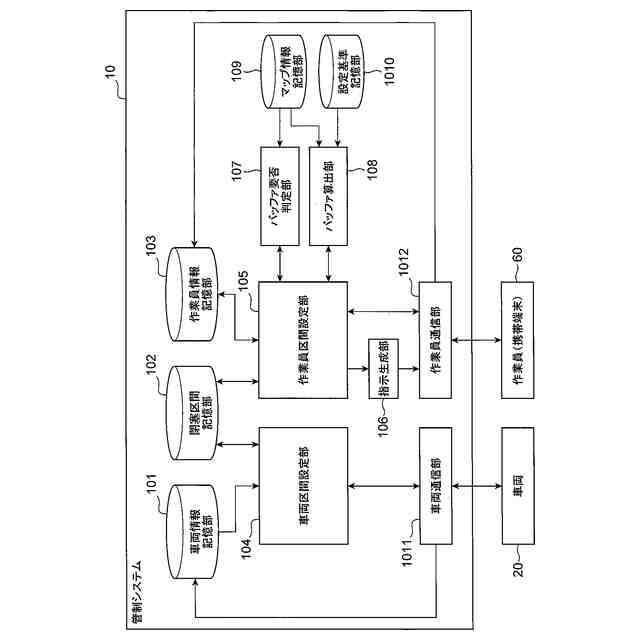
【解決手段】管制システムは、管制対象エリアにおいて車両20の専有区間を示す車両閉塞区間を設定する車両区間設定部と、作業員が進入可能な第一閉塞区間、及び、第一閉塞区間を包含し車両が進入不可能な第二閉塞区間を設定する作業員区間設定部と、第一閉塞区間の周囲にバッファ区間の設定が必要か否かを判定するバッファ要否判定部と、車両閉塞区間内での走行指示を車両に送信する車両通信部と、第一閉塞区間内での作業又は移動を作業員に許可する指示を作業員に送信する作業員通信部と、を有する。車両区間設定部は、第二閉塞区間を避けて車両閉塞区間を設定する。
【選択図】図6
特許請求の範囲
【請求項1】
管制対象エリア内を自動運転によって走行する車両と、前記管制対象エリア内において作業を行う作業員の携帯端末とに通信可能に接続され、前記車両の走行を管制する管制システムであって、
前記管制対象エリアのマップ情報を記憶するマップ情報記憶部と、
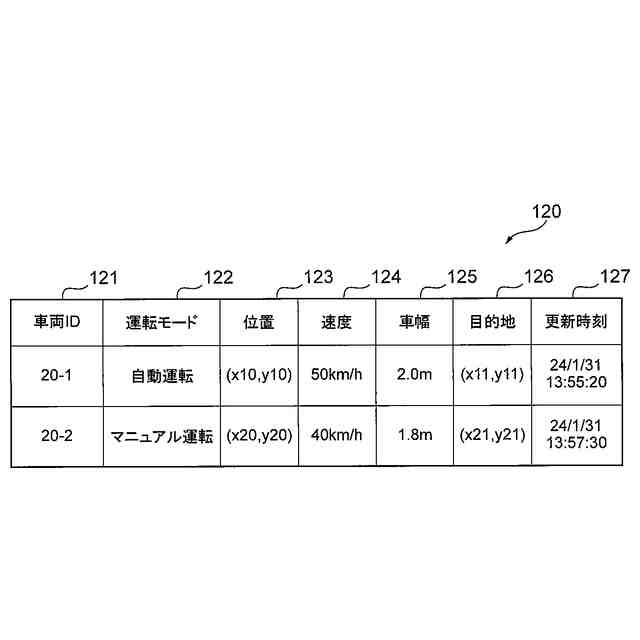
前記車両から送信された前記車両の位置情報に基づいて、前記車両の専有区間を示す車両閉塞区間を設定する車両区間設定部と、
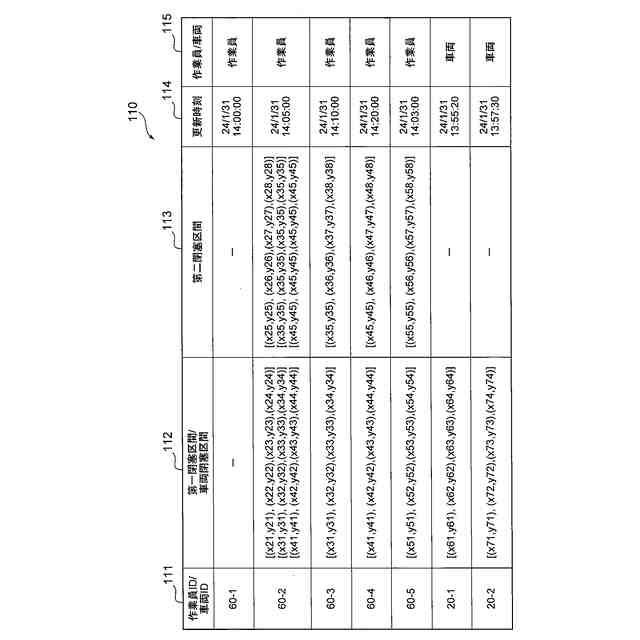
前記携帯端末から送信された前記作業員の位置情報に基づいて、前記作業員が進入可能な第一閉塞区間、及び、前記第一閉塞区間を包含し前記車両が進入不可能な第二閉塞区間を設定する作業員区間設定部と、
前記マップ情報に基づいて、前記第一閉塞区間の周囲にバッファ区間の設定が必要か否かを判定するバッファ要否判定部と、
前記車両区間設定部によって設定された前記車両閉塞区間内での走行を前記車両に指示する走行指示を、前記車両へ送信する車両通信部と、
前記作業員区間設定部によって設定された前記第一閉塞区間内での作業又は移動を前記作業員に許可する指示を、前記携帯端末へ送信する作業員通信部と、を有し、
前記作業員区間設定部は、前記バッファ要否判定部の判定結果に応じて前記第二閉塞区間を設定し、
前記車両区間設定部は、前記作業員区間設定部によって設定された前記第二閉塞区間を避けて前記車両閉塞区間を設定する
ことを特徴とする管制システム。
続きを表示(約 1,800 文字)
【請求項2】
前記バッファ区間を設定するための設定基準を記憶する設定基準記憶部と、
前記設定基準及び前記マップ情報に基づいて前記バッファ区間を算出するバッファ算出部と、を更に有し、
前記設定基準記憶部は、前記作業員が行う作業又は移動の分類に応じて異なる前記設定基準を記憶し、
前記バッファ算出部は、前記作業又は前記移動の分類に応じた前記設定基準に従って異なる大きさの前記バッファ区間を算出し、
前記作業員区間設定部は、前記バッファ算出部によって算出された前記バッファ区間を前記第一閉塞区間の周囲に加えた区間を前記第二閉塞区間として設定する
ことを特徴とする請求項1に記載の管制システム。
【請求項3】
前記設定基準記憶部は、前記作業の作業内容と、前記作業に伴う荷物の運搬に関する追加情報とに応じて異なる前記設定基準を記憶し、
前記バッファ算出部は、前記作業内容と前記追加情報とに応じた前記設定基準に従って異なる大きさの前記バッファ区間を算出する
ことを特徴とする請求項2に記載の管制システム。
【請求項4】
前記設定基準記憶部は、前記移動の際の荷物の運搬に関する移動中情報に応じて異なる前記設定基準を記憶し、
前記バッファ算出部は、前記移動中情報に応じた前記設定基準に従って異なる大きさの前記バッファ区間を算出する
ことを特徴とする請求項2に記載の管制システム。
【請求項5】
前記作業員区間設定部は、前記車両区間設定部によって設定された前記車両閉塞区間を避けて、前記第一閉塞区間及び前記第二閉塞区間のそれぞれを設定する
ことを特徴とする請求項2に記載の管制システム。
【請求項6】
前記作業員区間設定部は、前記第二閉塞区間を設定すると前記第二閉塞区間の前記バッファ区間が前記車両閉塞区間と重複する場合、前記車両閉塞区間と重複する前記バッファ区間の重複部分を削除して、前記第二閉塞区間を設定する
ことを特徴とする請求項5に記載の管制システム。
【請求項7】
前記作業員区間設定部は、前記バッファ区間の前記重複部分の削除によって前記車両閉塞区間と隣接する前記第一閉塞区間の境界を、前記第一閉塞区間と前記車両閉塞区間とを仕切るパーティションの設置箇所として特定し、
前記作業員通信部は、前記作業員区間設定部によって特定された前記設置箇所に対する前記パーティションの設置を前記作業員に指示するパーティション設置指示を、前記携帯端末へ送信する
ことを特徴とする請求項6に記載の管制システム。
【請求項8】
前記車両区間設定部は、前記車両閉塞区間を設定すると前記車両閉塞区間が前記第二閉塞区間の前記バッファ区間と重複する場合、前記バッファ区間と重複する前記車両閉塞区間の重複部分を削除して、前記車両閉塞区間を設定する
ことを特徴とする請求項1に記載の管制システム。
【請求項9】
前記車両区間設定部は、前記車両閉塞区間の前記重複部分の削除によって前記車両閉塞区間内に前記車両が通過できない通過不可箇所が存在する場合、前記通過不可箇所と隣接する前記バッファ区間に隣接する前記第一閉塞区間の境界を、前記第一閉塞区間と前記車両閉塞区間とを仕切るパーティションの設置箇所として特定し、
前記作業員通信部は、前記車両区間設定部によって特定された前記設置箇所に対する前記パーティションの設置を前記作業員に指示するパーティション設置指示を、前記携帯端末へ送信する
ことを特徴とする請求項8に記載の管制システム。
【請求項10】
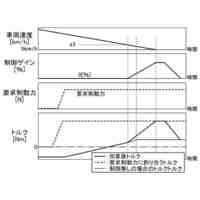
前記車両の上限速度を記憶する上限速度記憶部を更に有し、
前記上限速度記憶部は、前記車両閉塞区間の幅と前記車両の車幅との差分に応じて異なる前記上限速度を記憶し、
前記車両区間設定部は、前記差分に応じた前記上限速度を前記車両向けとして設定し、
前記車両通信部は、前記車両区間設定部によって設定された前記上限速度以下での走行を前記車両に指示する前記走行指示を、前記車両へ送信する
ことを特徴とする請求項2に記載の管制システム。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、自動運転システム向けの管制システムに関する。
続きを表示(約 1,700 文字)
【背景技術】
【0002】
近年、自動運転の普及に向けて様々な取り組みが進められており、その一つに、車両の運用方法又は走行範囲を限定した限定エリアでの自動運転が提案されている。こうした限定エリアでの自動運転は、一般道路等を対象とした非限定エリアでの自動運転と比べて安全性の担保が容易であるので、先行して進められることが想定される。
【0003】
一般的に、限定エリアでの自動運転システムを工場に導入する場合、作業員が自動運転車両の走行エリアに進入したり、作業員が作業車両を操縦して自動運転車両の走行エリアに進入したりすることがあるので、作業員と自動運転車両とが当該走行エリア内において混在することが想定される。このため、作業員又は作業車両が誤って当該走行エリアに進入した場合、自動運転車両と作業員とが接触する可能性がある。
【0004】
自動運転車両と作業員との接触、及び、作業車両同士の接触を防ぐための工夫が、様々な先行文献において開示されている。特許文献1には、ある作業車両が作業すべき範囲を適切に設定し、作業完了まで他の作業車両の進入を防止する技術が開示されている。
【0005】
特許文献2には、自律走行可能な無人車両と、無人車両に対して積込作業を行う積込機械と、無人車両の配車管理及び交通管制を行う管制局と、を含む車両管理システムに関する技術が開示されている。特許文献2の積込機械は、該積込機械の位置、方位及び各関節の角度の情報に基づいてバケットの爪先位置を算出する爪先位置算出部を備える。特許文献2の管制局は、無人車両の積込領域を算出し、算出した積込領域と積込機械の爪先位置とに基づいて、無人車両に対する呼込指示又は発進指示を行う無人車両指示部を備える。
【0006】
特許文献3には、有人作業機械に対して、新たな保護領域設定要求情報を送信しない第1保護領域であって、有人作業機械の位置が含まれる第1保護領域と、当該第1保護領域の外周に沿って設定された領域であって新たな保護領域設定要求情報を送信する第2保護領域とが含まれる保護領域を設定し、有人作業機械の車体の大きさを示す車体情報及び位置情報に基づいて、有人作業機械の車体が地表面に投影された平面において占有するエリアを算出し、その占有エリアが第1保護領域内にある場合は新たな保護領域設定要求情報を送信せず、第2保護領域内にある場合は保護領域設定要求情報を送信する技術が開示されている。
【先行技術文献】
【特許文献】
【0007】
特開2020-86779公報
特開2022-75200公報
再公表2018/056231
【発明の概要】
【発明が解決しようとする課題】
【0008】
特許文献1に開示された技術では、ある作業車両の作業完了まで、ある作業車両の作業範囲への他の作業車両の進入を防止するので、他の作業車両を停車させることがある。特許文献1に開示された技術では、自動運転車両が複数存在したり、又は、自動運転車両の他に主業務(例えば、港湾での船への積込・荷下作業等)に従事する車両が存在したりする場合、ある自動運転車両が他の自動運転車両の走行ルートで停車すると、他の自動運転車両の走行を妨害したり、他の車両の主業務を妨害したりする可能性がある。このように、特許文献1に開示された技術では、他の車両が作業範囲に進入しないよう他の車両を停車させるので、自動運転システム全体の生産性が低下する可能性がある。
【0009】
特許文献2及び特許文献3に開示された技術では、全ての場合においてバッファを設定するので、バッファが設定されたエリアが他の車両の走行に影響を及ぼす場合、自動運転システム全体の生産性が低下する可能性がある。
【0010】
本発明は、上記課題に鑑みてなされたものであり、自動運転車両と作業員とが混在するエリアに導入された自動運転システム全体の生産性の低下を抑止すると共に、作業員の安全を確保することを目的とする。
【課題を解決するための手段】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
Astemo株式会社
緩衝器
24日前
Astemo株式会社
緩衝器
16日前
Astemo株式会社
緩衝器
1日前
Astemo株式会社
電子装置
10日前
Astemo株式会社
車両制御装置
1日前
Astemo株式会社
電子制御装置
1日前
Astemo株式会社
充電制御装置
8日前
Astemo株式会社
管制システム
1日前
Astemo株式会社
ゲート駆動回路
24日前
Astemo株式会社
車載電力分配装置
8日前
Astemo株式会社
接合方法、構造物
16日前
Astemo株式会社
減衰力調整式緩衝器
1日前
Astemo株式会社
ノイズフィルタ装置
1日前
Astemo株式会社
内燃機関の制御装置
16日前
Astemo株式会社
電力変換装置の制御装置
16日前
Astemo株式会社
半導体装置及び電力変換装置
16日前
Astemo株式会社
電子制御装置及び環境認識方法
1日前
株式会社日立製作所
冷却構造
2日前
株式会社日立製作所
電力変換装置
2日前
株式会社日立製作所
電力変換装置
3日前
Astemo株式会社
モータ制御装置およびモータ制御方法
1日前
Astemo株式会社
電動ブレーキ及び電動ブレーキの組立方法
8日前
Astemo株式会社
電池管理システム、および、電池管理方法
16日前
Astemo株式会社
半導体装置、電力変換装置、半導体装置の製造方法
24日前
Astemo株式会社
バルブ装置
16日前
株式会社日立製作所
電力変換装置、電力変換装置の製造方法
3日前
Astemo株式会社
更新管理システム
29日前
Astemo株式会社
車両制御装置、車両制御方法および車両制御システム
22日前
Astemo株式会社
車載情報処理装置、自動運転システムおよび車載システム
18日前
Astemo株式会社
タスク分割システム、及び、車載タスク分割システム、タスク分割方法
22日前
Astemo株式会社
燃料インジェクタの制御方法および制御ユニット、コンピュータプログラム製品、ならびに燃料インジェクタの制御装置
5日前
日本精機株式会社
警報システム
3か月前
個人
安全支援装置
1か月前
個人
自動電動車椅子
2か月前
株式会社SUBARU
車両
1か月前
エムケー精工株式会社
車両誘導装置
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ