TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025170004
公報種別
公開特許公報(A)
公開日
2025-11-14
出願番号
2025141031,2024069021
出願日
2025-08-27,2020-09-30
発明の名称
車両制御装置、車両制御方法および車両制御システム
出願人
Astemo株式会社
代理人
弁理士法人綾田事務所
主分類
B60W
40/11 20120101AFI20251107BHJP(車両一般)
要約
【課題】 車両停車の際のピッチング変動を抑制することができる車両制御装置、車両制御方法、及び車両制御システムを提供する。
【解決手段】 本発明の一実施形態における車両制御装置、車両制御方法および車両制御システムは、車両の速度に関する物理量と、車両を減速させるために必要な要求制動力に関する物理量をと取得し、要求制動力に関する物理量に基づいて車両を減速させるときに、摩擦制動力が発生している状態で、駆動装置による駆動力を発生させることとした。
【選択図】 図16
特許請求の範囲
【請求項1】
車両の停車直前のときに、前記車両に摩擦制動力が作用している状態で、前記車両に駆動力を付与する制御指令を出力する、
車両制御装置。
続きを表示(約 270 文字)
【請求項2】
車両に搭載された車両制御装置が実行する車両制御方法であって、
前記車両の停車直前のときに、前記車両に摩擦制動力が作用している状態で、前記車両に駆動力を付与する制御指令を出力する、
車両制御方法。
【請求項3】
車両に摩擦制動力を発生させる摩擦制動装置と、
前記車両に駆動力を発生させる駆動装置と、
前記車両の停車直前のときに、前記車両に前記摩擦制動力が作用している状態で、前記車両に前記駆動力を付与する制御指令を出力する制御装置と、
を備える車両制御システム。
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置、車両制御方法および車両制御システムに関する。
続きを表示(約 2,900 文字)
【背景技術】
【0002】
特許文献1には、車両が減速状態から車速ゼロに移行する際の車両前後方向加速度を所定許容値以下とするトルク減少開始車速を、回生制動中の回生制動力と、モータ制駆動力の最終目標値と、回生制動力を減少させる所定の減少勾配と、に基づいて設定する車両の前後振動制御装置が開示されている。
【先行技術文献】
【特許文献】
【0003】
特開2016-28913号公報
【発明の概要】
【0004】
しかしながら、特許文献1では、車両速度の低下に合わせて回生制動力を低下させているため、該回生制動力の減少勾配の推定に基づく制御上の誤差によっては、車両停車の際にピッチング変動が生じるおそれがあった。
本発明の目的の一つは、車両停車の際のピッチング変動を抑制することができる車両制御装置、車両制御方法、及び車両制御システムを提供することにある。
【課題を解決するための手段】
【0005】
本発明の一実施形態における車両制御装置、車両制御方法および車両制御システムは、車両の速度に関する物理量と、車両を停車させるために必要な要求制動力に関する物理量とを取得し、要求制動力に関する物理量に基づいて車両の停車直前のときに、摩擦制動力が発生している状態で、駆動装置による駆動力を発生させることとした。
【発明の効果】
【0006】
本発明によれば、車両停車の際のピッチング変動を抑制することができる。
【図面の簡単な説明】
【0007】
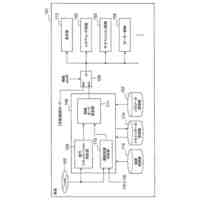
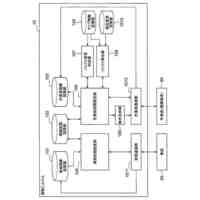
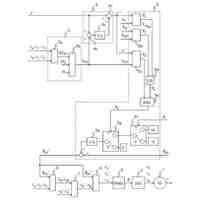
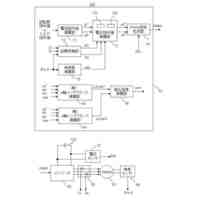
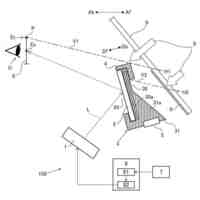
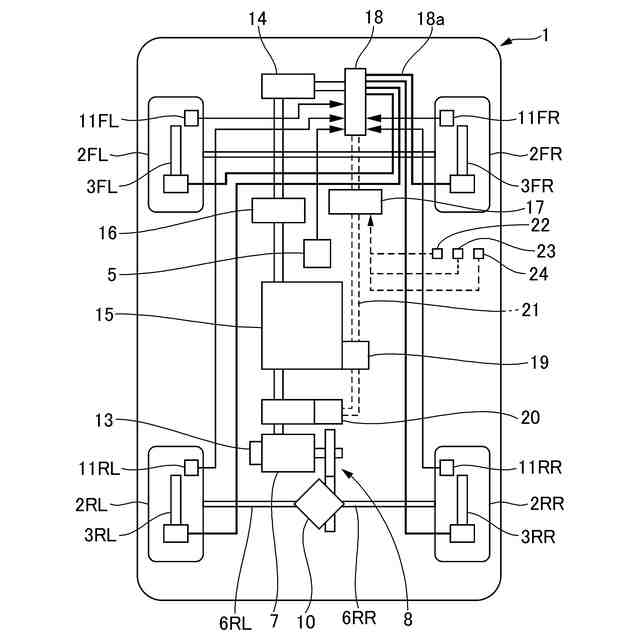
実施形態1における電動車両の制御システムの構成図である。
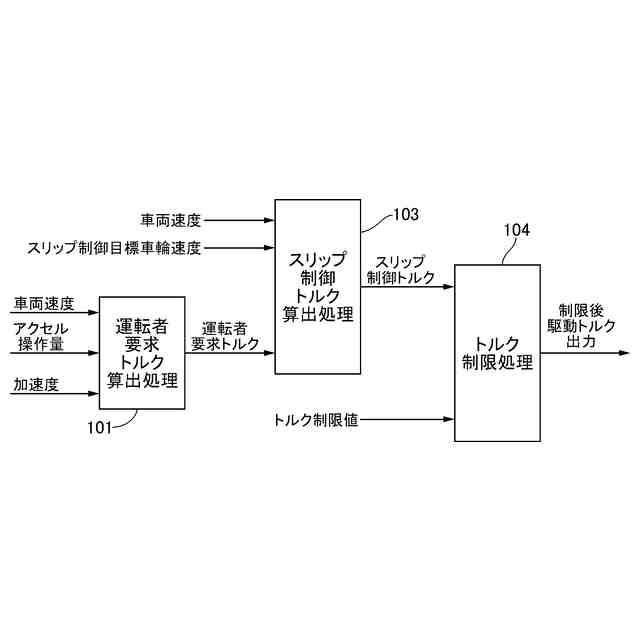
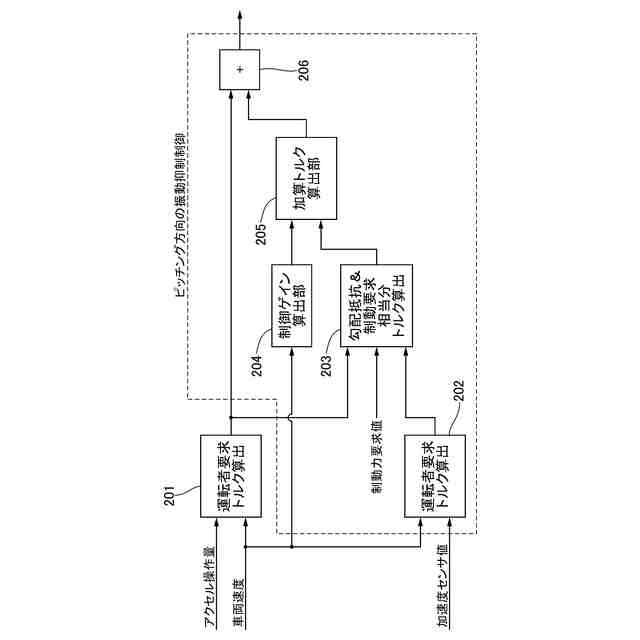
実施形態1における車両制御装置の駆動トルク算出処理を表す制御ブロック図である。
実施形態1における運転者要求トルク算出処理の詳細を表す制御ブロック図である。
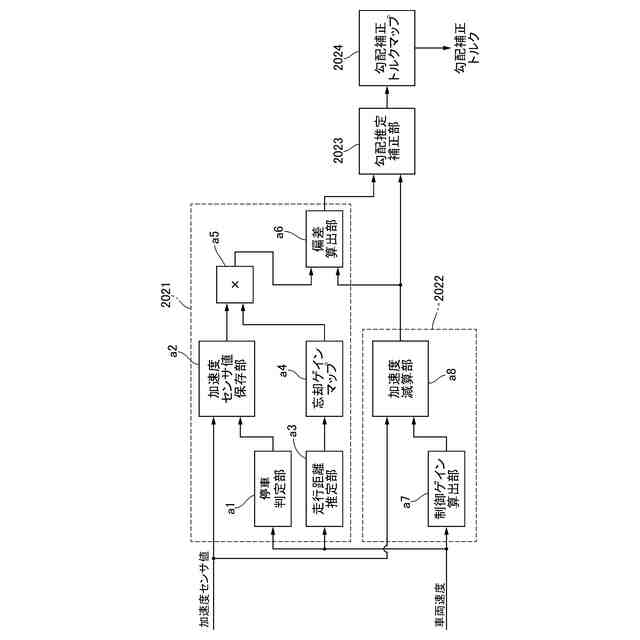
実施形態1における勾配抵抗算出部の詳細を表す制御ブロック図である。
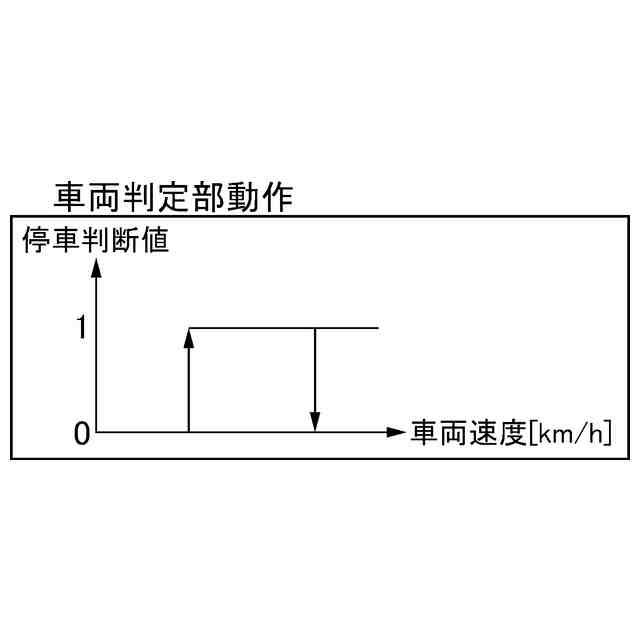
実施形態1における停車判定部の動作を表す図である。
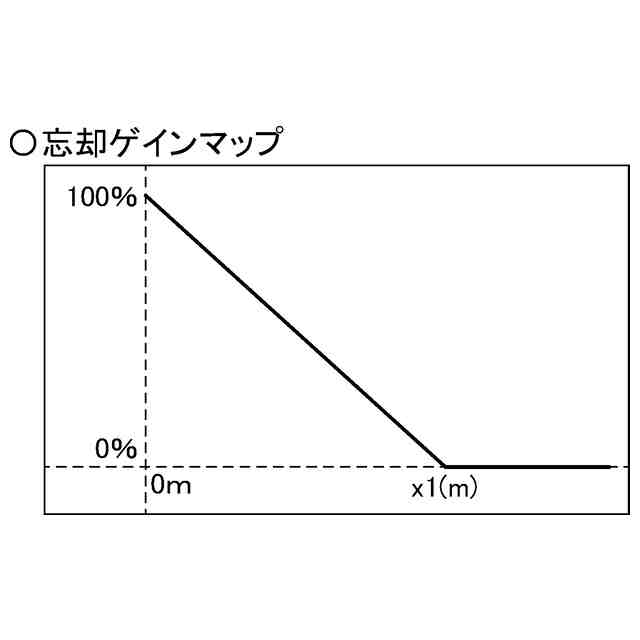
実施形態1における停車時情報保持部に備えられた忘却ゲインマップである。
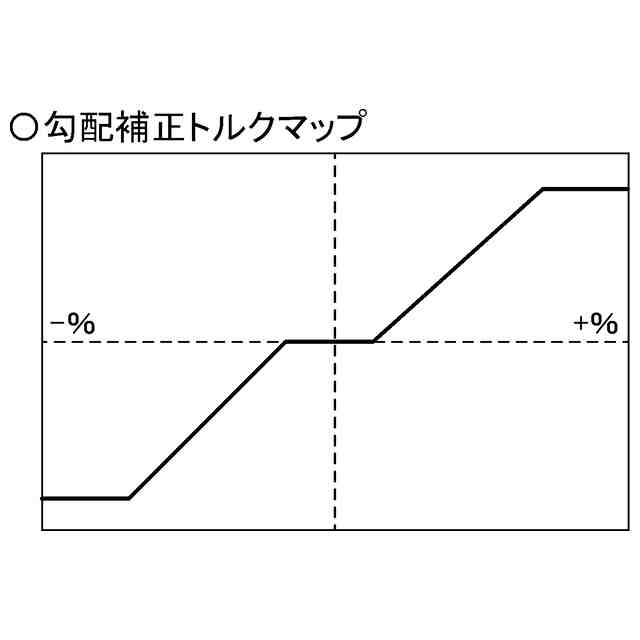
実施形態1における勾配抵抗算出部に備えられた勾配補正トルクマップである。
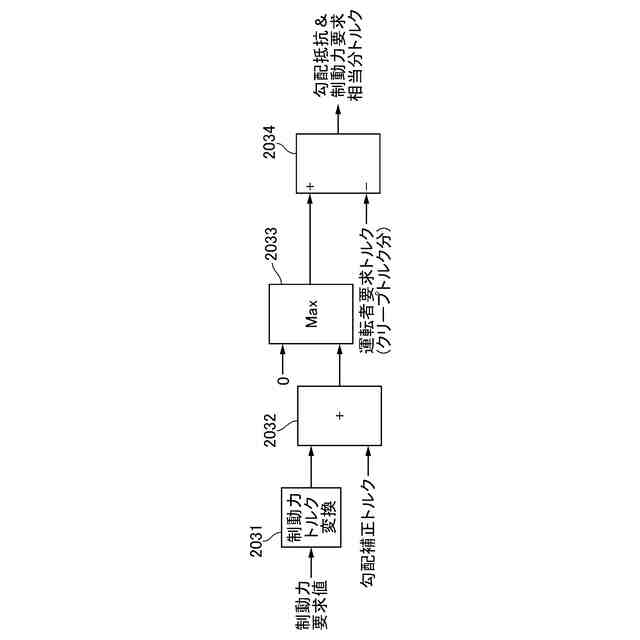
実施形態1における勾配抵抗&制動力要求相当分トルク算出部の詳細を表す制御ブロック図である。
実施形態1における制御ゲイン算出部及び加算トルク算出部の詳細を表す制御ブロック図である。
実施形態1における加速度可変型制御ゲインマップである。
実施形態1における速度可変型制御ゲインマップである。
実施形態1におけるゲイン保持時間調整部の詳細を表す制御ブロック図である。
実施形態1におけるゲイン保持時間調整部における作用を表すタイムチャートである。
実施形態1における制御ゲインレートリミット部の詳細を表す制御ブロック図である。
車両速度が低下している際のゲイン特性を表すタイムチャートである。
実施形態1における運転者要求トルク算出処理を実施した場合の車両速度の変化を表すタイムチャートである。
実際の車両に本制御を適用した場合と、適用しない場合との実験結果を表す図である。
【発明を実施するための形態】
【0008】
〔実施形態1〕
図1は、実施形態1における電動車両の制御システムの構成図である。
電動車両1は、前輪2FL、2FRと後輪2RL、2RRと、各輪に設けられ車輪に摩擦制動力を発生させる摩擦ブレーキ3FL、3FR、3RL、3RR(以下、各輪の摩擦ブレーキを総称して摩擦ブレーキ3とも記載する。)を有する。
電動車両1は、後輪2RL、2RRにトルクを出力するリアモータ(後輪用電動モータ)7を有する。尚、後輪2RL、2RRを総称して駆動輪2とも記載する。リアモータ7および後輪2RL、2RR間の動力伝達は、減速機8、ディファレンシャル10およびリア車軸6RL、6RRを介して行われる。
各車輪2FL、2FR、2RL、2RRは、車輪速を検出する車輪速センサ11FL、11FR、11RL、11RRを有する。リアモータ7は、モータ回転数を検出する後輪用レゾルバ13を有する。また、電動車両1は、車両の加速度を検出する加速度センサ5を有する。
摩擦ブレーキ3は、各輪と一体に回転するブレーキロータに対し、各輪の回転軸方向にブレーキパッドを押し付けて摩擦力により制動力を発生させる。実施形態1の摩擦ブレーキ3は、ブレーキ液圧により作動するホイルシリンダによってブレーキパッドを押し付ける構成について説明するが、電動モータにより駆動するボールねじ機構等を介してブレーキパッドを押し付ける構成としても良く、特に限定しない。
電動車両1は、低電圧バッテリ14および高電圧バッテリ15を有する。低電圧バッテリ14は、例えば鉛蓄電池である。高電圧バッテリ15は、例えばリチウムイオン電池またはニッケル水素電池である。高電圧バッテリ15は、DC-DCコンバータ16により昇圧された電力により充電される。
【0009】
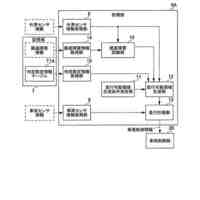
電動車両1は、車両制御装置17、ブレーキ制御装置18、リアモータ制御装置20およびバッテリ制御装置19を有する。各制御装置17、18、20は、CANバス21を介してお互いに情報を共有する。
車両制御装置17は、後輪用レゾルバ13、アクセル操作量を検出するアクセルペダルセンサ22、ブレーキ操作量を検出するブレーキセンサ23、ギヤ位置センサ24等の各種センサから情報を取得し、車両の統合制御を行う。車両制御装置17は、ドライバのアクセル操作やブレーキ操作等に応じた要求トルクに対し、要求配分トルクに応じてリアモータ7が出力すべき運転者要求トルクを出力する。
ブレーキ制御装置18は、加速度センサ5と、車輪速センサ11等の各種センサから情報を取得するとともに運転者要求トルクに基づいて、摩擦ブレーキ3に発生させる摩擦ブレーキトルクを算出し、各輪に必要なブレーキ液圧を発生させ、油圧配管18aを通して摩擦ブレーキ3に出力する。
【0010】
バッテリ制御装置19は、高電圧バッテリ15の充放電状態および高電圧バッテリ15を構成する単電池セルを監視する。バッテリ制御装置19は、高電圧バッテリ15の充放電状態等に基づいて、バッテリ要求トルク制限値を算出する。バッテリ要求トルク制限値は、リアモータ7において許容する最大トルクである。例えば高電圧バッテリ15の充電量が低下しているときには、通常よりもバッテリ要求トルク制限値を小さな値に設定する。
リアモータ制御装置20は、リア要求トルクに基づいてリアモータ7に供給する電力を制御する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
Astemo株式会社
緩衝器
18日前
Astemo株式会社
緩衝器
3日前
Astemo株式会社
電子装置
12日前
Astemo株式会社
車両制御装置
3日前
Astemo株式会社
管制システム
3日前
Astemo株式会社
電子制御装置
3日前
Astemo株式会社
充電制御装置
10日前
Astemo株式会社
接合方法、構造物
18日前
Astemo株式会社
車載電力分配装置
10日前
Astemo株式会社
ノイズフィルタ装置
3日前
Astemo株式会社
減衰力調整式緩衝器
3日前
Astemo株式会社
内燃機関の制御装置
18日前
Astemo株式会社
電力変換装置の制御装置
18日前
Astemo株式会社
半導体装置及び電力変換装置
18日前
株式会社日立製作所
冷却構造
4日前
Astemo株式会社
電子制御装置及び環境認識方法
3日前
株式会社日立製作所
電力変換装置
5日前
株式会社日立製作所
電力変換装置
4日前
Astemo株式会社
モータ制御装置およびモータ制御方法
3日前
Astemo株式会社
電動ブレーキ及び電動ブレーキの組立方法
10日前
Astemo株式会社
電池管理システム、および、電池管理方法
18日前
Astemo株式会社
バルブ装置
18日前
株式会社日立製作所
電力変換装置、電力変換装置の製造方法
5日前
Astemo株式会社
車載情報処理装置、自動運転システムおよび車載システム
20日前
Astemo株式会社
燃料インジェクタの制御方法および制御ユニット、コンピュータプログラム製品、ならびに燃料インジェクタの制御装置
7日前
個人
タイヤレバー
4か月前
個人
前輪キャスター
3か月前
個人
上部一体型自動車
2か月前
個人
ルーフ付きトライク
4か月前
個人
空間形成装置
1か月前
個人
ホイルのボルト締結
5か月前
個人
タイヤ脱落防止構造
3か月前
個人
キャンピングトライク
5か月前
日本精機株式会社
表示装置
4か月前
個人
マスタシリンダ
2か月前
日本精機株式会社
表示装置
4か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ