TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177994
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024085207
出願日
2024-05-24
発明の名称
車両制御装置
出願人
Astemo株式会社
代理人
弁理士法人平木国際特許事務所
主分類
B60W
30/02 20120101AFI20251128BHJP(車両一般)
要約
【課題】ドライバの嗜好に合わせる機能として、車載アクチュエータの制御モードが複数、例えばコンフォート、ノーマル、スポーツなどが用意されているが、ドライバが手動で切り替えるのみで活用されていない。
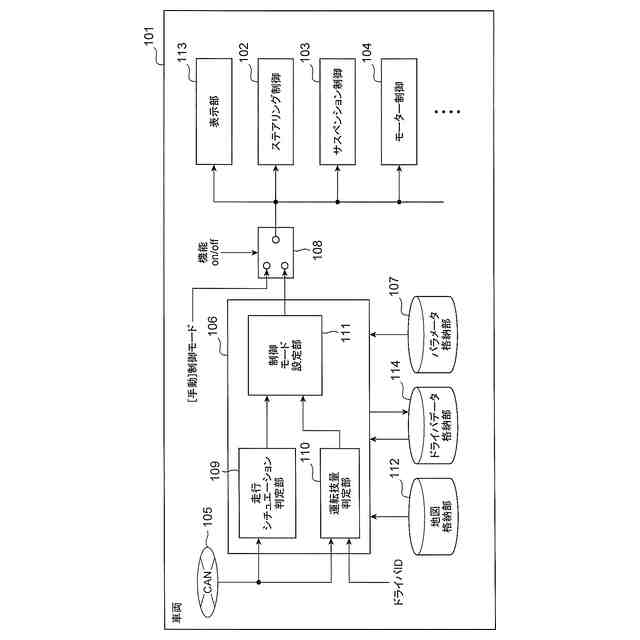
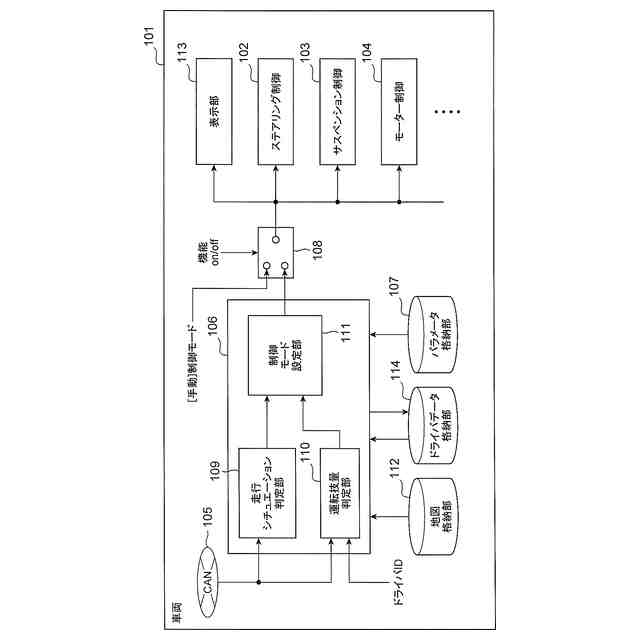
【解決手段】走行シチュエーション判定部109と運転技量判定部110を有し、従来ドライバが手動で切り替えていた車載アクチュエータ102~104の制御モードを走行シチュエーション、ドライバの運転技量の判定結果に基づいて自動で切り替える。これにより、ドライバにとって満足度が高い乗り心地と操縦安定性を提供する。
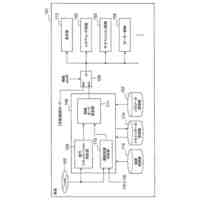
【選択図】図1
特許請求の範囲
【請求項1】
車両に搭載されるアクチュエータの制御モードを複数設定可能な車両制御装置であって、
前記車両の挙動情報と、該挙動情報と複数の制御モードとの相関関係を機械学習した学習パラメータと、前記車両を運転するドライバの運転技量の情報と、を用いて前記複数の制御モードの中から最適な制御モードを推定する最適制御モード推定部を備えることを特徴とする車両制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記最適制御モード推定部は、
前記車両の挙動情報と前記学習パラメータとを用いて前記複数の制御モードのいずれか一つを出力する走行シチュエーション判定部と、
前記車両の操作情報に基づいて前記運転技量の情報を取得する運転技量判定部と、
前記走行シチュエーション判定部により出力される前記制御モードと、前記運転技量の情報とを用いて最適な制御モードを設定する制御モード設定部と、
を備えることを特徴とする請求項1に記載の車両制御装置。
【請求項3】
前記運転技量判定部は、
前記ドライバによる前記車両の操作情報と、該操作情報と複数の運転技量レベルとの相関関係を機械学習した学習パラメータと、を用いて前記複数の運転技量レベルのいずれか一つを出力することを特徴とする請求項2に記載の車両制御装置。
【請求項4】
前記運転技量判定部は、
車両方向と自己位置と地図情報に基づいて複数のターゲット操舵角候補を計算する操舵角候補計算部と、
車両の操舵角情報に基づいて前記複数のターゲット操舵角候補からいずれか一つをターゲット操舵角として選択するターゲット操舵角選択部と、
前記車両の操舵前状態から前記ターゲット操舵角までの理想操舵角遷移と、実操舵角遷移を比較する操舵角差計算部と、
を備え、
前記理想操舵角遷移と前記実操舵角遷移との操舵角差に基づいて前記運転技量の判定を行うことを特徴とする請求項2に記載の車両制御装置。
【請求項5】
前記運転技量判定部は、
車両方向と自己位置と地図情報に基づいて制限速度情報を抽出する制限速度情報抽出部と、
前記制限速度情報と前記車両の車速情報との車速差を計算する車速差計算部と、
を備え、
前記車速差に基づいて前記運転技量の判定を行うことを特徴とする請求項2に記載の車両制御装置。
【請求項6】
前記制御モード設定部は、
前記運転技量に基づいて前記走行シチュエーション判定部の出力を補正し、
該補正後の出力に基づいて前記最適な制御モードを設定することを特徴とする請求項2に記載の車両制御装置。
【請求項7】
前記運転技量判定部の判定結果に応じて前記車両の挙動情報を補正する信号調整部を備え、
前記走行シチュエーション判定部は、前記信号調整部により補正された補正後の前記挙動情報と前記学習パラメータを用いて前記複数の制御モードのいずれか一つを出力することを特徴とする請求項2に記載の車両制御装置。
【請求項8】
前記ドライバの運転嗜好を設定する運転嗜好設定部を備え、
前記走行シチュエーション判定部は、前記ドライバの運転嗜好と、前記車両の挙動情報と、前記学習パラメータと、を用いて前記複数の制御モードのいずれか一つを出力することを特徴とする請求項2に記載の車両制御装置。
【請求項9】
前記車両の同乗者情報を取得して前記車両の運転状況を判定する運転状況判定部を備え、
前記制御モード設定部は、
前記運転状況判定部により判定される前記車両の運転状況と、前記走行シチュエーション判定部により出力される前記制御モードと、前記運転技量の情報とを用いて最適な制御モードを設定することを特徴とする請求項2に記載の車両制御装置。
【請求項10】
前記車両の挙動情報は、車載ネットワークの時系列データであり、
前記制御モード設定部が参照する前記情報は、所定期間の時系列データ、あるいは、所定の走行行程の時系列データに含まれる車両挙動イベントである、
ことを特徴とする請求項2に記載の車両制御装置。
(【請求項11】以降は省略されています)
発明の詳細な説明
【技術分野】
【0001】
本発明は、車両制御装置に関するものである。
続きを表示(約 3,300 文字)
【背景技術】
【0002】
路面状況や運転状況に合わせてサスペンションの堅さや特性などを変化させて車両の姿勢を制御するサスペンション制御装置が知られている。
【0003】
特許文献1には、車両の運転モードの切り替えを行うスポーツモードスイッチ、スノーモードスイッチ、エコモードスイッチを備え、これらの運転モード切替手段の切替状態に応じて運転モードを設定し、その運転モードを含む制御指令信号をサスペンションやサスペンションの制御を担当するECUに転送して、所望の乗り心地を実現することを目的とした装置の技術が記載されている。実車においては、低速域を主とする街中での走行や、高速域を主とする高速道路や自動車専用道路の走行、クイック操舵や高頻度な加減速が好まれるかもしれない峠道の走行などに直面した時に、ドライバがダイヤルを操作して運転モードを切り替えるようになっている。
【0004】
特許文献2には、オートクルーズスイッチのオン/オフやシフトレバーの位置の情報に基づいて車両の走行状況を判定し、判定結果を参照してサスペンションの特性を変更する技術が示されている。
【先行技術文献】
【特許文献】
【0005】
特開2008-132876号公報
特開2013-116641号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
特許文献1の装置は、ドライバが手動で制御モードを切り替えるのみであり、必ずしも好適の乗り心地と操縦安定性が両立できず、本機能を十分に活用できていない。
【0007】
また、特許文献2の装置によれば、ドライバが特段の意図を持たずとも、ドライバの操作状況に応じて、サスペンションの特性が変更されることが示されているが、参照する情報として挙げられているのは、ドライバのシフトレバー等の操作状況のみであり、必ずしも走行シチュエーションに基づいた制御モードが選択できるわけではない。
【課題を解決するための手段】
【0008】
本発明による車両制御装置は、
車両に搭載されるアクチュエータの制御モードを複数設定可能な車両制御装置であって、
前記車両の挙動情報と、該挙動情報と複数の制御モードとの相関関係を機械学習した学習パラメータと、前記車両を運転するドライバの運転技量の情報と、を用いて前記複数の制御モードの中から最適な制御モードを推定する最適制御モード推定部を備えることを特徴とする。
【発明の効果】
【0009】
本発明によれば、走行シチュエーションに応じた車載アクチュエータ、例えば、ステアリングやサスペンション、モータ制御が可能になり、自動車の乗り心地と操縦安定性が向上したり、ドライバの満足度が向上する。
本発明に関連する更なる特徴は、本明細書の記述、添付図面から明らかになるものである。また、上記した以外の、課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
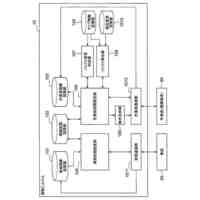
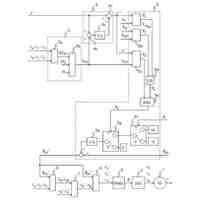
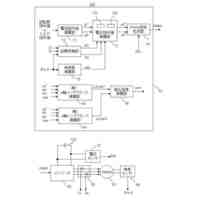
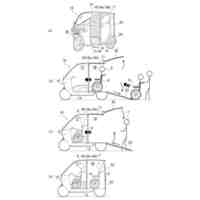
本発明の第1の実施形態の自動適合車両システムにおける車両のブロック構成図である。
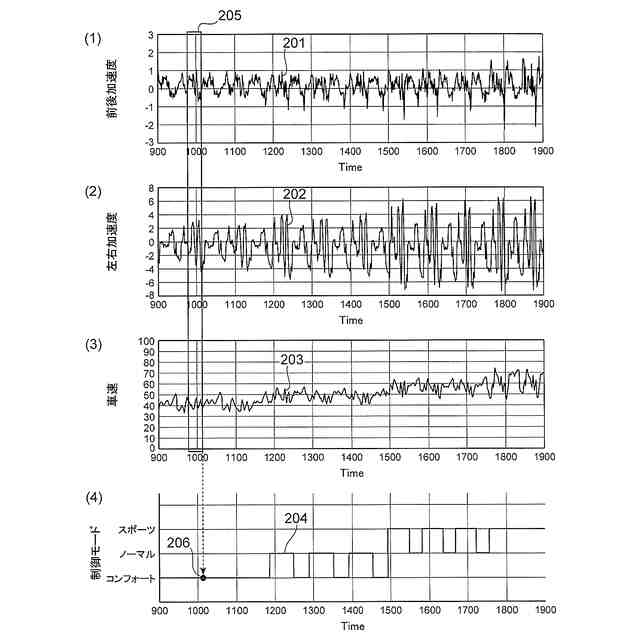
本発明の第1の実施形態の自動適合車両システムにおける最適制御モード推定部106の入出力波形の関係を示した図である。
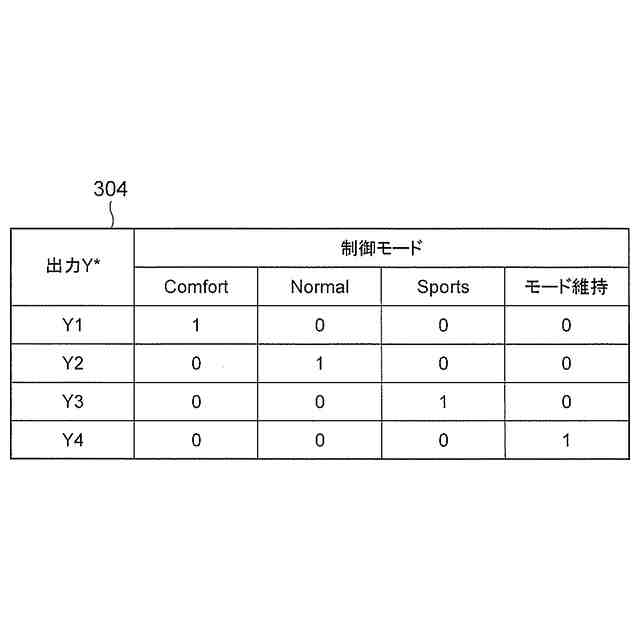
本発明の第1の実施形態にかかる走行シチュエーション判定部109の一例を示した図であり、ニューラルネットワーク300を適用した場合を示した図であり、ニューラルネットワーク300の構成を示す。
本発明の第1の実施形態にかかる走行シチュエーション判定部109の一例を示した図であり、出力素子の値と対応する制御モードとの関係を示した真理値表を示す。
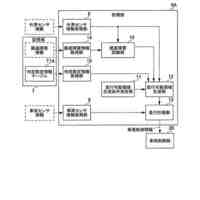
本発明の第1の実施形態の自動適合車両システムのブロック構成図である。
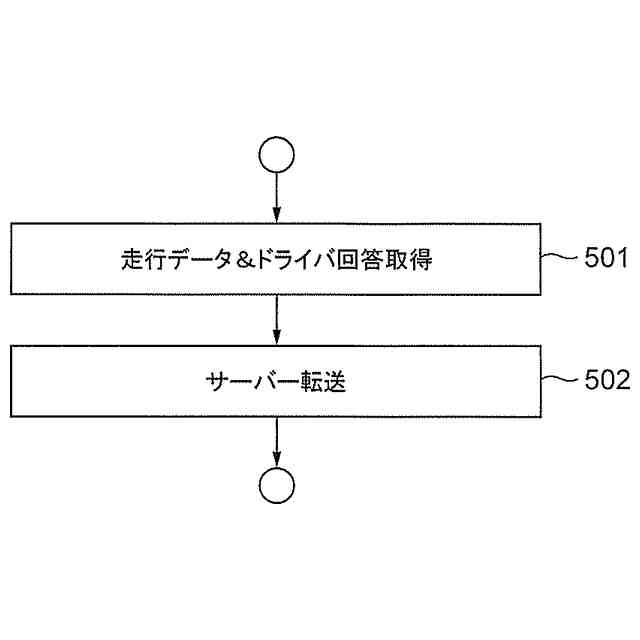
本発明の第1の実施形態の自動適合車両システムにおける試験車両の制御処理を説明するフローチャートを示した図である。
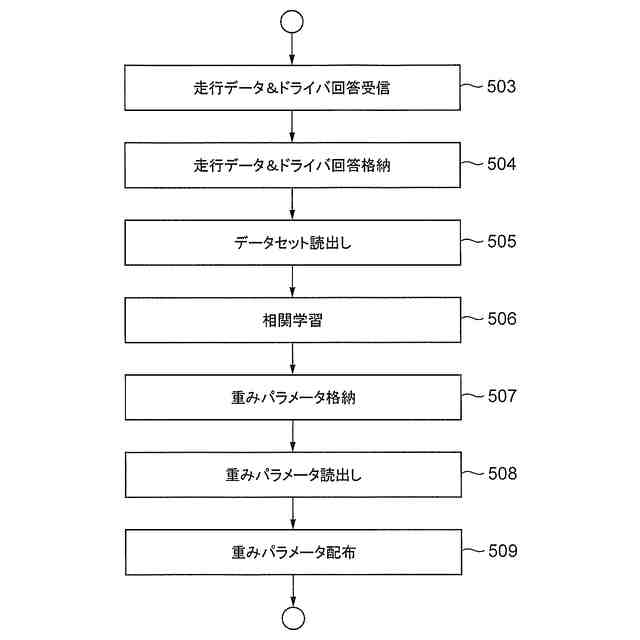
本発明の第1の実施形態の自動適合車両システムにおけるサーバの制御処理を説明するフローチャートを示した図である。
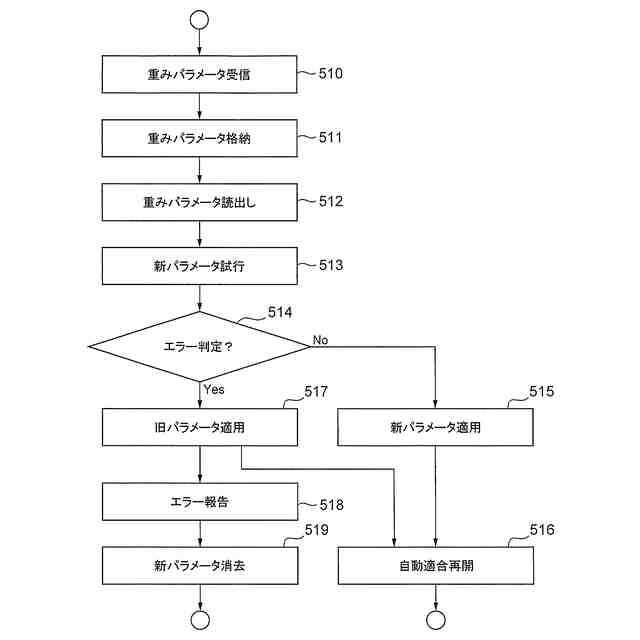
本発明の第1の実施形態の自動適合車両システムにおける車両の制御処理を説明するフローチャートを示した図である。
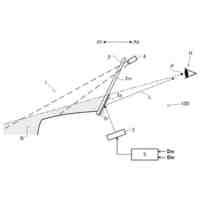
本発明の第1の実施形態の自動適合車両システムにおける運転技量判定部110の一例に関する図であり、操舵角に着目した場合のブロック構成図である。
本発明の第1の実施形態の自動適合車両システムにおける運転技量判定部110の運転技量を測る一例を示した図である。
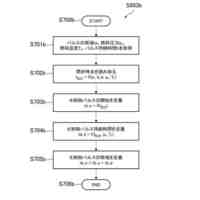
本発明の第1の実施形態の自動適合車両システムにおける運転技量判定部110の運転技量を判定する処理を説明するフローチャートを示した図である。
本発明の第1の実施形態の自動適合車両システムにおける運転技量判定部110の運転技量を判定するための条件の一例を示した図である。
本発明の第1の実施形態の自動適合車両システムにおける運転技量判定部110の一例に関する図であり、車速に着目した場合のブロック構成図である。
本発明の第1の実施形態の自動適合車両システムにおける運転技量判定部110の運転技量を測る一例を示した図である。
本発明の第1の実施形態の自動適合車両システムにおける運転技量判定部110の一例に関する図であり、ニューラルネットワークを適用した場合を示した図である。
本発明の第1の実施形態の自動適合車両システムにおける運転技量判定部110の出力素子の値と対応する運転技量との関係を示した真理値表である。
本発明の第1の実施形態の自動適合車両システムの制御モード設定部111において制御モードを決定する場合のブロック構成図である。
本発明の第1の実施形態における最適制御モード推定部106において、CANから到来する挙動情報に対して信号値を調整することで制御モードを決定する場合のブロック構成図である。
本発明の第1の実施形態における制御モード切替のバリエーションを示した図である。
本発明の第1の実施形態における制御モード切替の出力素子の値と対応する制御モードとの関係を示した真理値表である。
本発明の第1の実施形態における制御モード設定部111の出力に関して、ドライバに情報を提示する場合の例を示した図である。
本発明の第1の実施形態における制御モード設定部111の出力に関して、ドライバに情報を提示する場合の他の例を示した図である。
本発明の第2の実施形態の自動適合車両システムにおける車両のブロック構成図である。
本発明の第2の実施形態の自動適合車両システムにおける最適制御モード推定部106の処理の一例に関する図であり、ニューラルネットワークで実現する場合の図である。
本発明の第2の実施形態の自動適合車両システムにおける最適制御モード推定部106の処理の一例に関する図であり、ドライバNo.と運転嗜好モデルとの関係を示した真理値表である。
本発明の第3の実施形態の自動適合車両システムにおける車両のブロック構成図である。
本発明の第3の実施形態の自動適合車両システムの運転状況判定部における家族モード等の入力モードと制御モードの切替の対応を示した表である。
本発明の第3の実施形態の自動適合車両システムの運転状況判定部について、ドライバがスマートフォンなどの情報端末を使用して、運転状況判定部の仕様を調整する例を示した図である。
本発明の第3の実施形態の自動適合車両システムの運転状況判定部について、情報端末に仕様表と仕様選択画面の一例を示した図である。
本発明の第4の実施形態の自動適合車両システムの運転技量判定部110において制御モードを決定する場合のブロック構成図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
Astemo株式会社
緩衝器
17日前
Astemo株式会社
緩衝器
2日前
Astemo株式会社
電子装置
11日前
Astemo株式会社
車両制御装置
2日前
Astemo株式会社
管制システム
2日前
Astemo株式会社
電子制御装置
2日前
Astemo株式会社
充電制御装置
9日前
Astemo株式会社
接合方法、構造物
17日前
Astemo株式会社
車載電力分配装置
9日前
Astemo株式会社
ノイズフィルタ装置
2日前
Astemo株式会社
減衰力調整式緩衝器
2日前
Astemo株式会社
内燃機関の制御装置
17日前
Astemo株式会社
電力変換装置の制御装置
17日前
Astemo株式会社
半導体装置及び電力変換装置
17日前
株式会社日立製作所
冷却構造
3日前
Astemo株式会社
電子制御装置及び環境認識方法
2日前
株式会社日立製作所
電力変換装置
4日前
株式会社日立製作所
電力変換装置
3日前
Astemo株式会社
モータ制御装置およびモータ制御方法
2日前
Astemo株式会社
電動ブレーキ及び電動ブレーキの組立方法
9日前
Astemo株式会社
電池管理システム、および、電池管理方法
17日前
Astemo株式会社
バルブ装置
17日前
株式会社日立製作所
電力変換装置、電力変換装置の製造方法
4日前
Astemo株式会社
車載情報処理装置、自動運転システムおよび車載システム
19日前
Astemo株式会社
燃料インジェクタの制御方法および制御ユニット、コンピュータプログラム製品、ならびに燃料インジェクタの制御装置
6日前
個人
タイヤレバー
4か月前
個人
前輪キャスター
3か月前
個人
上部一体型自動車
2か月前
個人
ホイルのボルト締結
5か月前
個人
空間形成装置
1か月前
個人
ルーフ付きトライク
4か月前
個人
タイヤ脱落防止構造
3か月前
井関農機株式会社
作業車両
5か月前
井関農機株式会社
作業車両
6か月前
個人
キャンピングトライク
5か月前
日本精機株式会社
表示装置
3か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ