TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177619
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024084624
出願日
2024-05-24
発明の名称
電子制御装置及び環境認識方法
出願人
Astemo株式会社
代理人
弁理士法人信友国際特許事務所
主分類
G08G
1/16 20060101AFI20251128BHJP(信号)
要約
【課題】車両制御後の車両状態を踏まえて自車両が安全に走行できるようにした電子制御装置を提供する。
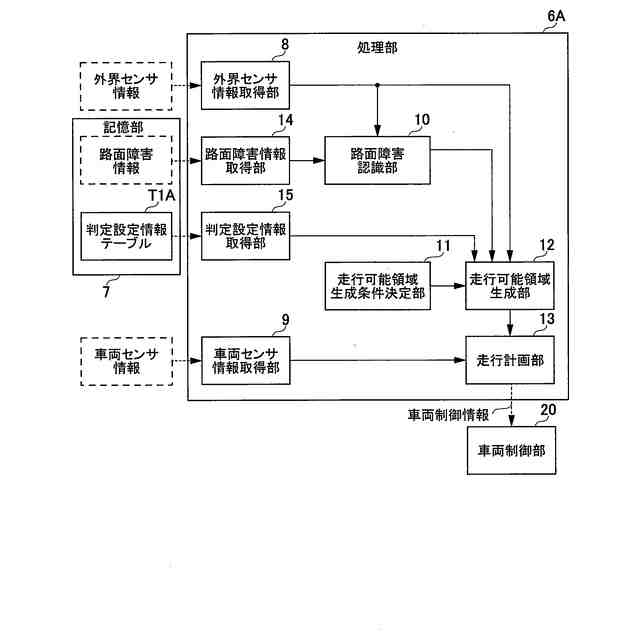
【解決手段】電子制御装置2は、自車両の外界に関する外界センサ情報を取得する外界センサ情報取得部8と、車両1の状態を表す車両状態に応じて外界センサ情報で把握される外界領域の種別ごとに車両1の走行可否が定められた判定設定情報を取得する判定設定情報取得部15と、外界センサ情報及び判定設定情報に基づいて、車両1が走行可能な領域である走行可能領域を複数の車両状態ごとに生成し、走行可能領域を出力する走行可能領域生成部12と、を備える。
【選択図】図9
特許請求の範囲
【請求項1】
自車両の外界に関する外界情報を取得する外界情報取得部と、
前記自車両の状態を表す車両状態に応じて前記外界情報で把握される外界領域の種別ごとに前記自車両の走行可否が定められた判定設定情報を取得する判定設定情報取得部と、
前記外界情報及び前記判定設定情報に基づいて、前記自車両が走行可能な領域である走行可能領域を複数の前記車両状態ごとに生成し、前記走行可能領域を出力する走行可能領域生成部と、を備える
電子制御装置。
続きを表示(約 1,600 文字)
【請求項2】
前記走行可能領域を生成する際の前記車両状態の範囲が定められた走行可能領域生成条件を決定する走行可能領域生成条件決定部を備え、
前記走行可能領域生成部は、前記外界情報、前記判定設定情報、及び前記走行可能領域生成条件に基づいて、前記走行可能領域を生成する
請求項1に記載の電子制御装置。
【請求項3】
前記自車両の現在の車両状態を取得する車両状態取得部を備え、
前記走行可能領域生成条件決定部は、前記自車両の現在の車両状態に基づいて、前記走行可能領域生成条件を決定する
請求項2に記載の電子制御装置。
【請求項4】
前記自車両が路面上で乗り越え可能な路面障害を認識するための路面障害情報と、前記外界情報とに基づいて認識した前記路面障害を表す路面障害認識情報を出力する路面障害認識部を備え、
前記走行可能領域生成部は、前記外界情報、前記路面障害認識情報、及び前記走行可能領域生成条件に基づいて、前記走行可能領域を生成する
請求項2に記載の電子制御装置。
【請求項5】
前記自車両の現在の車両状態を取得する車両状態取得部と、
前記自車両の現在の車両状態と、前記走行可能領域とに基づいて、前記自車両の走行計画を生成する走行計画部と、を備える
請求項2に記載の電子制御装置。
【請求項6】
前記走行可能領域の生成時点における前記車両状態の範囲が定められた走行可能領域生成条件を決定する走行可能領域生成条件決定部を備え、
前記走行可能領域生成条件決定部は、前記自車両の現在の車両状態と、前記走行計画部から取得した前記自車両の走行計画とに基づいて、前記走行可能領域生成条件を決定する
請求項5に記載の電子制御装置。
【請求項7】
前記走行可能領域生成条件決定部は、複数の前記走行可能領域生成条件を決定し、
前記走行可能領域生成部は、複数の前記走行可能領域生成条件に対し、それぞれ複数の前記走行可能領域を生成し、
前記走行計画部は、前記外界情報と、前記自車両が路面上で乗り越え可能な路面障害が認識された路面障害認識情報と、複数の前記走行可能領域とに基づいて前記走行計画を決定する
請求項6に記載の電子制御装置。
【請求項8】
前記外界情報と、前記車両状態と、前記走行計画とに基づいて、前記自車両の制御結果を監視する制御結果監視部を備え、
前記走行可能領域生成部は、前記制御結果に基づいて、前記判定設定情報を更新する
請求項5に記載の電子制御装置。
【請求項9】
前記外界情報と、前記車両状態とに基づいて、前記自車両の制御結果を監視し、前記制御結果に基づいて記憶部の判定設定情報を更新する制御結果監視部を備え、
前記判定設定情報取得部は、前記記憶部から更新された前記判定設定情報を取得し、
前記走行可能領域生成部は、前記制御結果により更新された前記判定設定情報に基づいて、保持する前記判定設定情報を更新する
請求項1に記載の電子制御装置。
【請求項10】
コンピュータにより実行される環境認識方法であって、
自車両の外界に関する外界情報を取得するステップと、
前記自車両の状態を表す車両状態に応じて前記外界情報で把握される外界領域の種別ごとに前記自車両の走行可否が定められた判定設定情報を取得するステップと、
前記外界情報及び前記判定設定情報に基づいて、前記自車両が走行可能な領域である走行可能領域を複数の前記車両状態ごとに生成し、前記走行可能領域を出力するステップと、を含む
環境認識方法。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電子制御装置及び環境認識方法に関する。
続きを表示(約 2,400 文字)
【背景技術】
【0002】
近年、車両の快適で安全な運転支援や自動運転を実現するため、車両が走行する路面上の落下物等を検出して車両の走行軌道を制御する技術が提案されている。例えば、特許文献1では、車両が路面上で乗り越え可能な路面障害による車両の走行リスク度合に応じた自然な目標軌道を生成する技術が開示されている。
【0003】
この特許文献1には、「車両が路面上で乗り越え可能な路面障害を少なくとも含む車両の周辺の環境要素に関する情報を取得する情報取得部と、情報に基づき、車両の周辺の各位置における車両の走行リスクの度合を表現したリスクマップを生成するリスクマップ生成部と、リスクマップに基づき、車両の走行制御のための走行軌道を決定する走行制御計画部と、を備え、走行制御計画部は、走行軌道における車両の車輪軌道が通過するリスクマップ上の路面障害による走行リスクの度合に基づき、走行軌道を決定する」と記載されている。
【先行技術文献】
【特許文献】
【0004】
特開2022-83359号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載された技術は、車両が乗り越え可能な障害物である路面障害に対し、現在の車両状態に基づいて当該路面障害を跨いだり踏み越えたりした場合の走行リスクを計算し、計算された走行リスク度合いに応じて目標走行軌道を選択する。しかしながら、実際の走行軌道計画では、現在の車両状態のまま当該路面障害を跨いだり踏み越えたりするのではなく、車両制御により減速するなど、車両状態を変化させて、車両が当該路面障害を跨いだり、踏み越えたりすることがある。
【0006】
そのため、特許文献1に記載された、現在の車両状態に基づいて走行リスク度合いを計算する方法では、車両の制御を考慮した、制御後の車両状態における走行リスクを計算することができない。このため、特許文献1に記載の技術は、車両の制御を考慮に含めた走行軌道計画を行うことができず、走行軌道の選択肢が限定され、車両の制御を考慮した安全性の高い走行軌道の選択ができないというおそれがあった。
【0007】
本発明はこのような状況に鑑みて成されたものであり、車両制御後の車両状態を踏まえて自車両が安全に走行できるようにすることを目的とする。
【課題を解決するための手段】
【0008】
本発明に係る電子制御装置は、自車両の外界に関する外界情報を取得する外界情報取得部と、自車両の状態を表す車両状態に応じて外界情報で把握される外界領域の種別ごとに自車両の走行可否が定められた判定設定情報を取得する判定設定情報取得部と、外界情報及び判定設定情報に基づいて、自車両が走行可能な領域である走行可能領域を複数の車両状態ごとに生成し、走行可能領域を出力する走行可能領域生成部と、を備える。
【発明の効果】
【0009】
本発明によれば、車両制御後の車両状態を踏まえて生成された、自車両の走行可能領域が出力されるので、自車両が安全に走行できるようになる。
上記した以外の課題、構成及び効果は、以下の実施形態の説明により明らかにされる。
【図面の簡単な説明】
【0010】
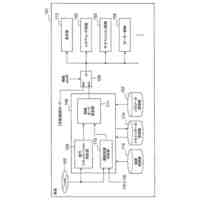
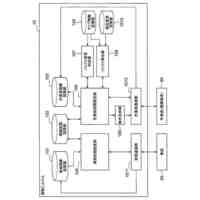
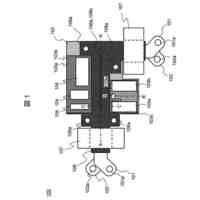
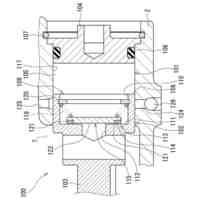
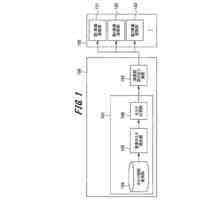
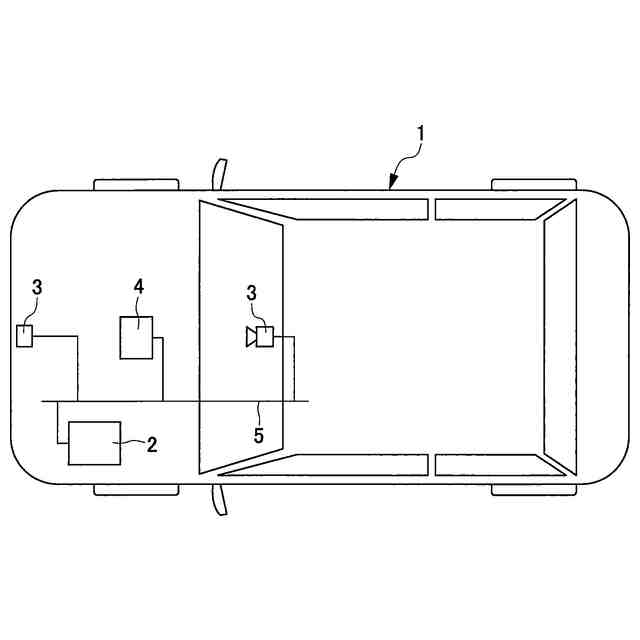
本発明の第の実施形態に係る電子制御装置、及び電子制御装置に関連するハードウェア構成例を示す概略構成図である。
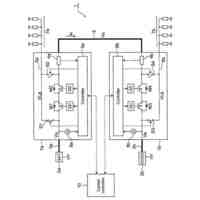
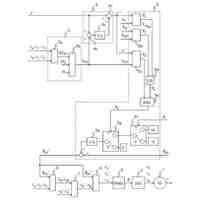
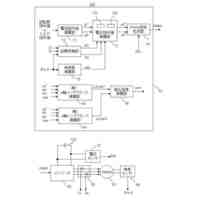
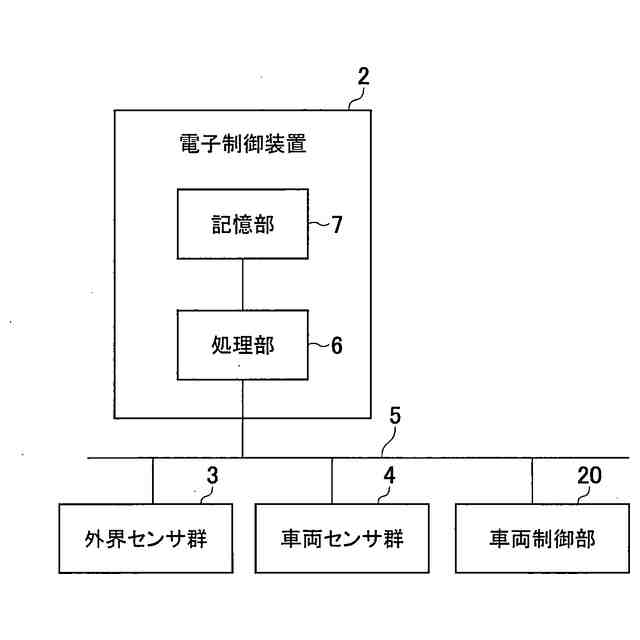
本発明の第1の実施形態に係る電子制御装置、外界センサ群、車両センサ群、及び車両制御部の接続構成例を示す図である。
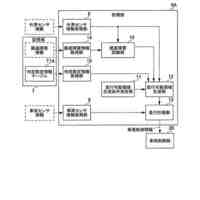
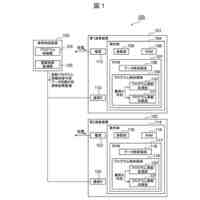
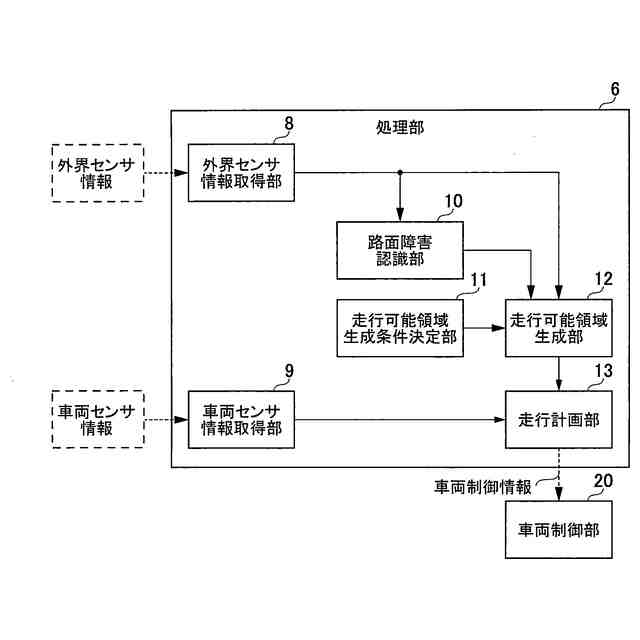
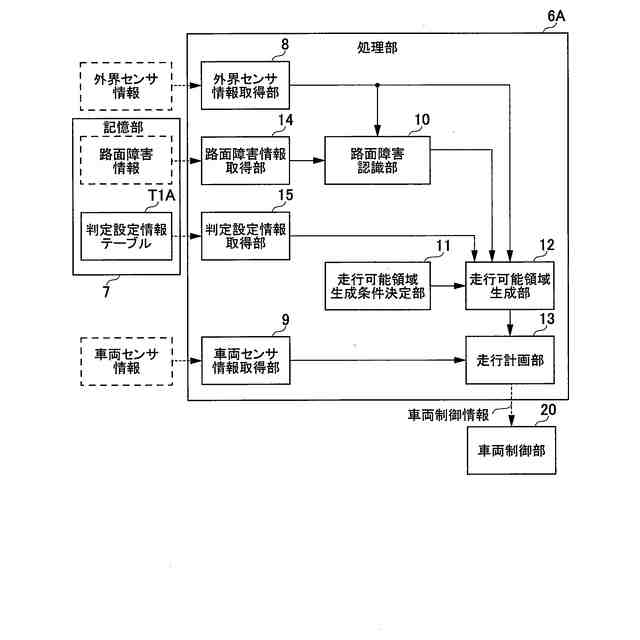
本発明の第1の実施形態に係る処理部の内部構成例を示すブロック図である。
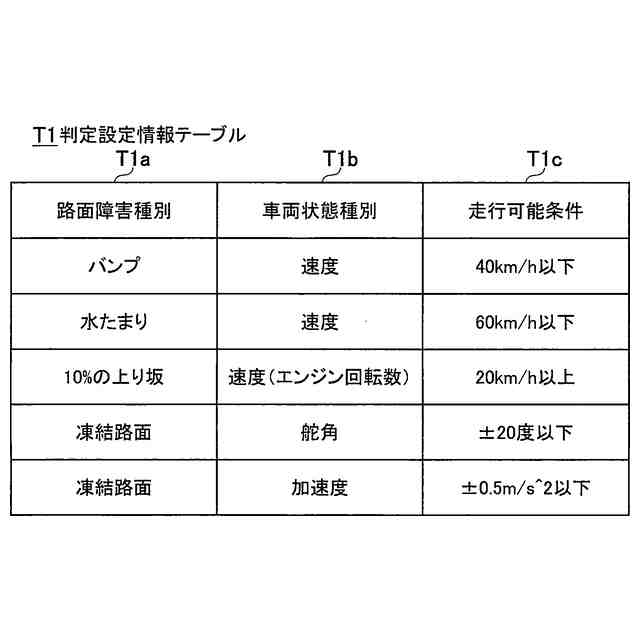
本発明の第1の実施形態に係る判定設定情報テーブルのデータ構造の例を示す図である。
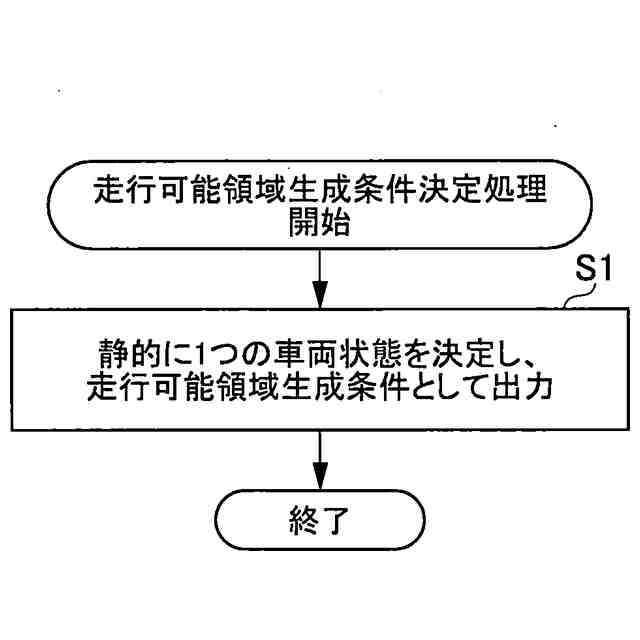
本発明の第1の実施形態に係る走行可能領域生成条件決定部の例を示すフローチャートである。
本発明の第1の実施形態に係る走行可能領域生成処理の例を示すフローチャートである。
本発明の第1の実施形態に係る走行計画処理の例を示すフローチャートである。
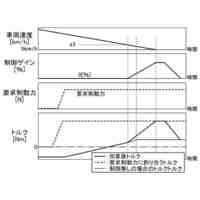
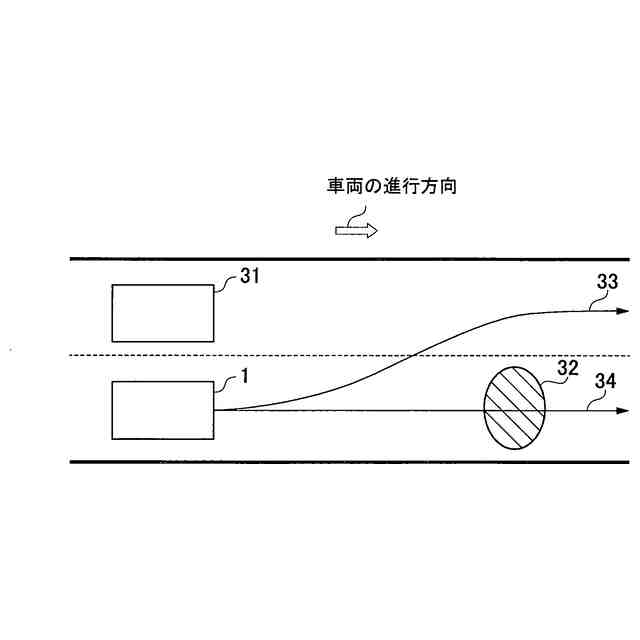
本発明の第1の実施形態に係る処理部の具体的な処理の様子を示す図である。
本発明の第2の実施形態に係る処理部の内部構成例を示すブロック図である。
本発明の第3の実施形態に係る処理部の内部構成例を示すブロック図である。
本発明の第3の実施形態に係る未来の車両状態推定テーブルのデータ構造例を示す図である。
本発明の第3の実施形態に係る車両状態推定パラメータ設定テーブルのデータ構造の例を示す図である。
本発明の第3の実施形態に係る走行可能領域生成条件決定処理の例を示すフローチャートである。
本発明の第4の実施形態に係る処理部の構成例を示すブロック図である。
本発明の第4の実施形態に係る走行計画別車両状態推定パラメータ設定テーブルのデータ構造の例を示す図である。
本発明の第4の実施形態に係る走行計画処理の例を示すフローチャートである。
本発明の第4の実施形態に係る走行可能領域生成条件決定処理の例を示すフローチャートである。
本発明の第5の実施形態に係る処理部の構成例を示すブロック図である。
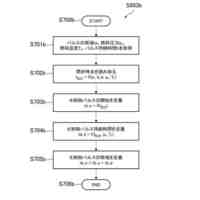
本発明の第5の実施形態に係る走行可能領域生成処理の例を示すフローチャートである。
本発明の第6の実施形態に係る処理部の構成例を示すブロック図である。
本発明の第7の実施形態に係る処理部の構成例を示すブロック図である。
【発明を実施するための形態】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
Astemo株式会社
緩衝器
1か月前
Astemo株式会社
緩衝器
25日前
Astemo株式会社
緩衝器
17日前
Astemo株式会社
緩衝器
2日前
Astemo株式会社
電子装置
11日前
Astemo株式会社
車両制御装置
2日前
Astemo株式会社
管制システム
2日前
Astemo株式会社
電子制御装置
2日前
Astemo株式会社
充電制御装置
9日前
Astemo株式会社
ゲート駆動回路
25日前
Astemo株式会社
接合方法、構造物
17日前
Astemo株式会社
車載電力分配装置
9日前
Astemo株式会社
ノイズフィルタ装置
2日前
Astemo株式会社
減衰力調整式緩衝器
2日前
Astemo株式会社
内燃機関の制御装置
17日前
Astemo株式会社
電力変換装置の制御装置
17日前
Astemo株式会社
半導体装置及び電力変換装置
17日前
株式会社日立製作所
冷却構造
3日前
Astemo株式会社
電子制御装置及び環境認識方法
2日前
株式会社日立製作所
電力変換装置
3日前
株式会社日立製作所
電力変換装置
4日前
Astemo株式会社
モータ制御装置およびモータ制御方法
2日前
Astemo株式会社
電動ブレーキ及び電動ブレーキの組立方法
9日前
Astemo株式会社
電池管理システム、および、電池管理方法
17日前
Astemo株式会社
半導体装置、電力変換装置、半導体装置の製造方法
25日前
Astemo株式会社
データ収集装置、車両制御装置及びデータ収集システム
1か月前
Astemo株式会社
バルブ装置
17日前
株式会社日立製作所
電力変換装置、電力変換装置の製造方法
4日前
Astemo株式会社
更新管理システム
1か月前
Astemo株式会社
制御装置及び制御システム
1か月前
Astemo株式会社
車両制御装置、車両制御方法および車両制御システム
23日前
Astemo株式会社
車載情報処理装置、自動運転システムおよび車載システム
19日前
Astemo株式会社
タスク分割システム、及び、車載タスク分割システム、タスク分割方法
23日前
Astemo株式会社
燃料インジェクタの制御方法および制御ユニット、コンピュータプログラム製品、ならびに燃料インジェクタの制御装置
6日前
個人
安全支援装置
1か月前
日本精機株式会社
警報システム
3か月前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ