TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
公開番号
2025171450
公報種別
公開特許公報(A)
公開日
2025-11-20
出願番号
2024076810
出願日
2024-05-09
発明の名称
電力変換装置の制御装置
出願人
Astemo株式会社
代理人
弁理士法人開知
主分類
H02P
21/22 20160101AFI20251113BHJP(電力の発電,変換,配電)
要約
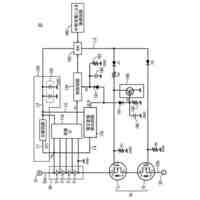
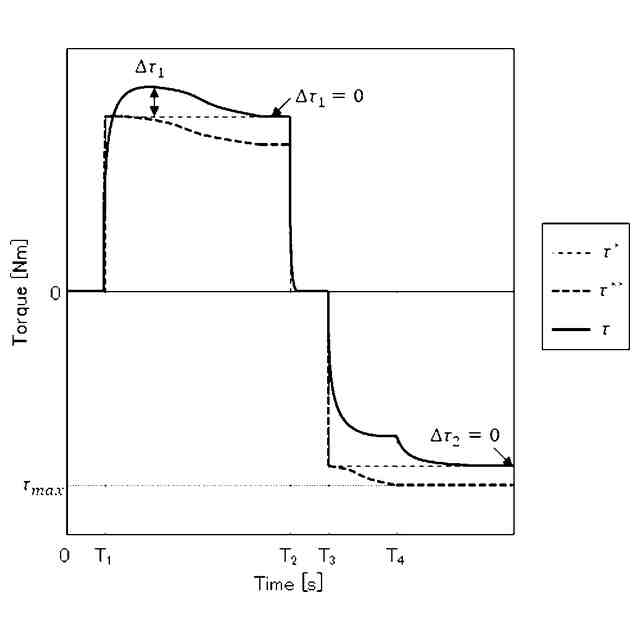
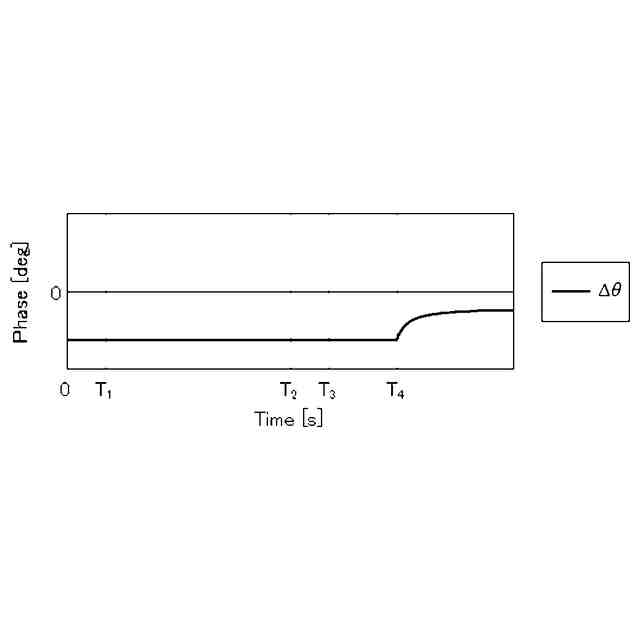
【課題】トルク出力を中断することなく、電動機の回転位置の検出誤差を補正することできる電力変換装置の制御装置を提供し、電動機の回転位置の検出誤差の影響によるトルク不足を解消する。
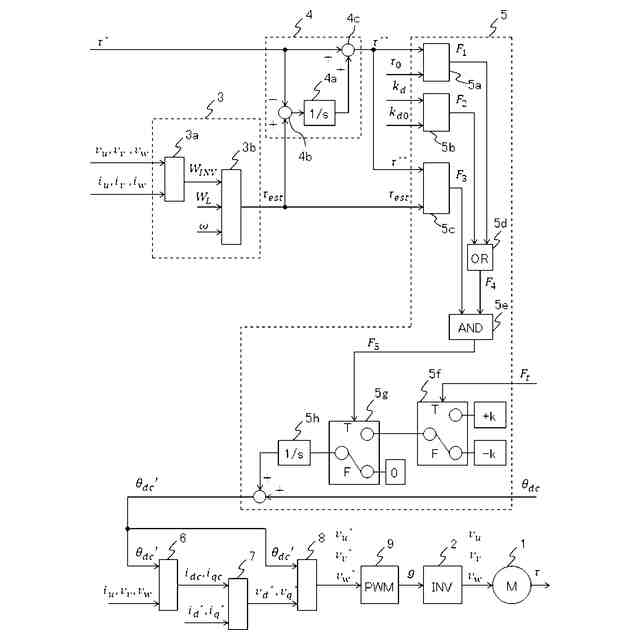
【解決手段】電動機1を駆動する電力変換装置2の制御装置において、電動機1のトルク推定値を演算するトルク推定部3と、電動機1の回転位置の検出値を補正する位相補正部5と、を備える。電動機1のトルク指令値τ
*
が所定値以上または変調率kdが所定値以上、かつトルク推定値τ
est
がトルク指令値τ
*
以下のとき、位相補正部5は、電動機1の回転位置の検出値の誤差を補正する。これにより、トルク出力を中断することがなく、電動機1の回転位置の検出誤差の影響によるトルク不足を解消することができる。
【選択図】図1
特許請求の範囲
【請求項1】
電動機を駆動する電力変換装置の制御装置において、
前記電動機のトルク推定値を演算するトルク推定部と、前記電動機の回転位置の検出値を補正する位相補正部と、を備え、
前記電動機のトルク指令値が所定値以上または変調率が所定値以上、かつ前記トルク推定値が前記トルク指令値以下のとき、前記位相補正部は、前記電動機の前記回転位置の検出値の誤差を補正することを特徴とする電力変換装置の制御装置。
続きを表示(約 1,300 文字)
【請求項2】
請求項1に記載の電力変換装置の制御装置において、
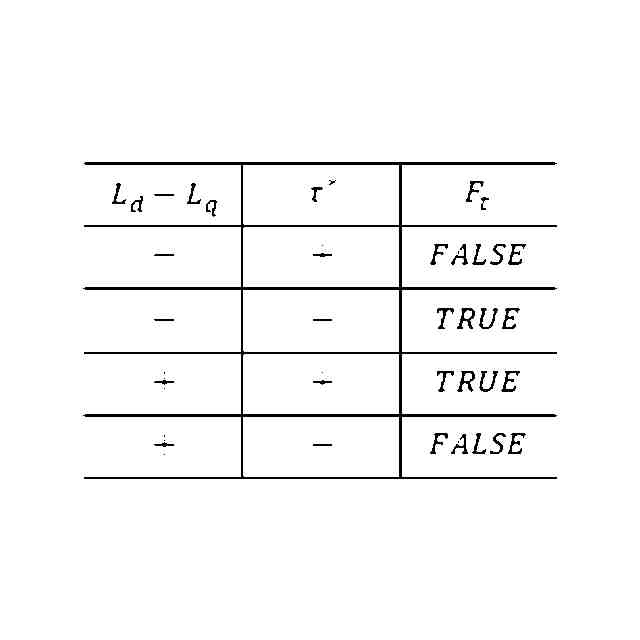
前記電動機が逆突極性をもつ永久磁石同期電動機であり、前記電動機の前記トルク指令値が正の場合、前記位相補正部は、前記電動機の前記回転位置の検出値を負方向に補正することを特徴とする電力変換装置の制御装置。
【請求項3】
請求項1に記載の電力変換装置の制御装置において、
前記電動機が逆突極性をもつ永久磁石同期電動機であり、前記電動機の前記トルク指令値が負の場合、前記位相補正部は、前記電動機の前記回転位置の検出値を正方向に補正する電力変換装置の制御装置。
【請求項4】
請求項1に記載の電力変換装置の制御装置において、
前記電動機が順突極性をもつ永久磁石同期電動機であり、かつ前記電動機の前記トルク指令値が正の場合、前記位相補正部は、前記電動機の前記回転位置の検出値を正方向に補正する電力変換装置の制御装置。
【請求項5】
請求項1に記載の電力変換装置の制御装置において、
前記電動機が順突極性をもつ永久磁石同期電動機であり、かつ前記電動機の前記トルク指令値が負の場合、前記位相補正部5は、前記電動機1の前記回転位置の検出値を負方向に補正する電力変換装置の制御装置。
【請求項6】
請求項1に記載の電力変換装置の制御装置において、
前記電動機の前記回転位置の検出値の補正量は、前記トルク指令値がトルク所定値未満、かつ前記変調率が変調率所定値未満となる場合、あるいは前記トルク推定値が前記トルク指令値以上となる場合は、維持されることを特徴とする電力変換装置の制御装置。
【請求項7】
請求項1に記載の電力変換装置の制御装置において、
前記トルク推定部は、
前記電力変換装置の出力を前記電動機の電圧と電流の内積から演算し、前記出力から前記電動機の損失を差し引いた値を前記電動機の回転速度で除算した値を前記トルク推定値とすることを特徴とする電力変換装置の制御装置。
【請求項8】
請求項1に記載の電力変換装置の制御装置において、
前記トルク指令値を、前記トルク指令値と前記トルク推定値との差分に基づいて補正するトルク指令補正部を備えることを特徴とする電力変換装置の制御装置。
【請求項9】
請求項8に記載の電力変換装置の制御装置において、
前記トルク指令補正部は、
前記トルク推定値から前記トルク指令値を減算する減算器と、
前記トルク指令値と前記トルク推定値との差分を積分する積分器と、
前記トルク指令値と前記トルク推定値の積分値を前記トルク指令値に加算し、補正後トルク指令値とする加算器、
を備えることを特徴とする電力変換装置の制御装置。
【請求項10】
請求項1に記載の電力変換装置の制御装置において、
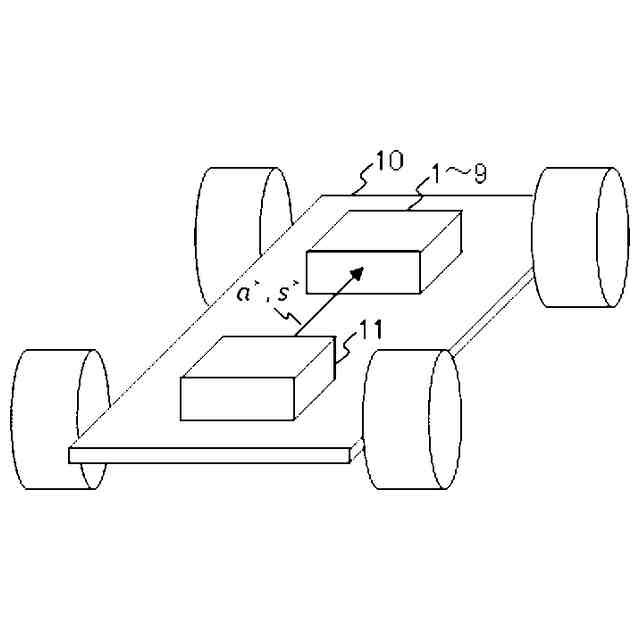
前記電動機は、電動車の駆動源であり、前記電動車の加速度指令あるいは速度指令が前記制御装置に入力されることを特徴とする電力変換装置の制御装置。
発明の詳細な説明
【技術分野】
【0001】
本発明は、電動機を駆動する電力変換装置の制御装置に関する。
続きを表示(約 1,000 文字)
【背景技術】
【0002】
電動機の制御装置では、電動機のトルク精度が重要な指標となる。課題となるのが各種誤差であり、例えば回転位置の検出誤差があると電圧・電流位相を正しく制御できないため、トルク誤差が発生する。
【0003】
そこで、特許文献1に記載の制御装置では電流指令をゼロとし、電動機のd軸電圧がゼロとなるように回転位置の検出値を補正している。これは電動機の電流がゼロである場合において、もし回転位置の検出誤差がなければ、電動機のd軸電圧がゼロとなるためである。
【先行技術文献】
【特許文献】
【0004】
特開2004-266935号公報
【発明の概要】
【発明が解決しようとする課題】
【0005】
特許文献1に記載の制御装置においては、電流指令をゼロにするため、トルクもゼロになる。そのため、回転位置の検出誤差を補正するためにはトルク出力を中断する必要があり、電動車においては加速が途切れ、運転者の指示に対する追従精度が低下する可能性がある。
【0006】
本発明の目的は、トルク出力を中断することなく、回転位置の検出誤差を補正することできる電力変換装置の制御装置を提供することである。
【課題を解決するための手段】
【0007】
上記目的を達成するため、本発明は次のように構成される。
【0008】
電動機を駆動する電力変換装置の制御装置において、前記電動機のトルク推定値を演算するトルク推定部と、前記電動機の回転位置の検出値を補正する位相補正部と、を備え、前記電動機のトルク指令値が所定値以上または変調率が所定値以上、かつ前記トルク推定値が前記トルク指令値以下のとき、前記位相補正部は、前記電動機の前記回転位置の検出値の誤差を補正する。
【発明の効果】
【0009】
本発明によれば、トルク出力を中断することなく、回転位置の検出誤差を補正することできる電力変換装置の制御装置を提供することができる。
【0010】
トルク出力を継続したまま、回転位置の検出誤差の影響によるトルク誤差を抑制できる。このため、電動機を動力源とする電動車において加速指令あるいは速度指令への追従精度を高めることができる。
【図面の簡単な説明】
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
個人
電気を重力で発電装置
17日前
個人
高圧電気機器の開閉器
4日前
キヤノン電子株式会社
モータ
16日前
トヨタ自動車株式会社
モータ
16日前
株式会社アイドゥス企画
減反モータ
4日前
矢崎総業株式会社
電源回路
3日前
トヨタ自動車株式会社
ステータの製造装置
17日前
日産自動車株式会社
ロータシャフト
11日前
日産自動車株式会社
ロータシャフト
11日前
ローム株式会社
モータドライバ回路
11日前
個人
非対称鏡像力を有する4層PWB電荷搬送体
11日前
京商株式会社
模型用非接触電力供給システム
4日前
株式会社アイシン
電力変換装置
16日前
トヨタ自動車株式会社
可変界磁ロータ
19日前
株式会社豊田自動織機
電力供給システム
16日前
豊田合成株式会社
車両用非接触充電装置
16日前
大阪瓦斯株式会社
充放電中継装置
17日前
大阪瓦斯株式会社
充放電中継装置
17日前
本田技研工業株式会社
回転電機用ロータ
4日前
ルネサスエレクトロニクス株式会社
半導体装置
16日前
ニデック株式会社
回転電機
16日前
個人
電動自動車用同期電動機の変速方法と駆動制御装置
18日前
株式会社豊田中央研究所
分散電源システム
11日前
株式会社京三製作所
パルス電源装置
3日前
日動電工株式会社
壁内配線用のブランクプレート
3日前
株式会社京三製作所
パルス電源装置
3日前
株式会社日立産機システム
キュービクル
19日前
株式会社日立産機システム
電力変換装置
18日前
パナソニック株式会社
分電盤
16日前
パナソニック株式会社
分電盤
16日前
パナソニック株式会社
分電盤
16日前
パナソニック株式会社
分電盤
16日前
株式会社GSユアサ
蓄電装置
11日前
ローム株式会社
電源制御装置
11日前
キヤノン株式会社
振動型アクチュエータ及び電子機器
16日前
株式会社豊田自動織機
双方向充電器
18日前
続きを見る
他の特許を見る


 特許ウォッチ
特許ウォッチ