TOP
|
特許
|
意匠
|
商標
特許ウォッチ
Twitter
他の特許を見る
10個以上の画像は省略されています。
公開番号
2025177245
公報種別
公開特許公報(A)
公開日
2025-12-05
出願番号
2024083888
出願日
2024-05-23
発明の名称
ロッカーボギー車及びロッカーボギー車の操作方法
出願人
株式会社明電舎
代理人
園田・小林弁理士法人
主分類
G05D
1/224 20240101AFI20251128BHJP(制御;調整)
要約
【課題】 遠隔操作時の非言語コミュニケーションを実現し、作業の効率化を図ること。
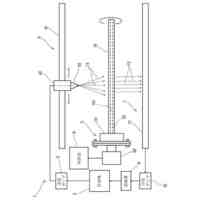
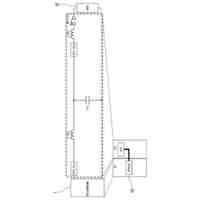
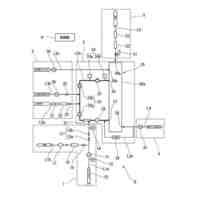
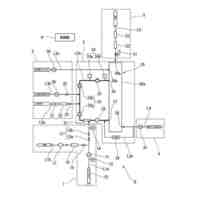
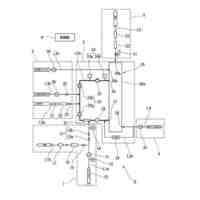
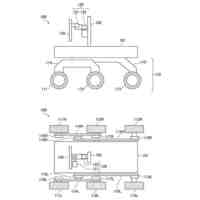
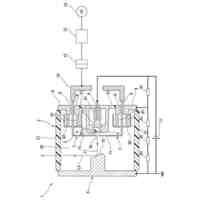
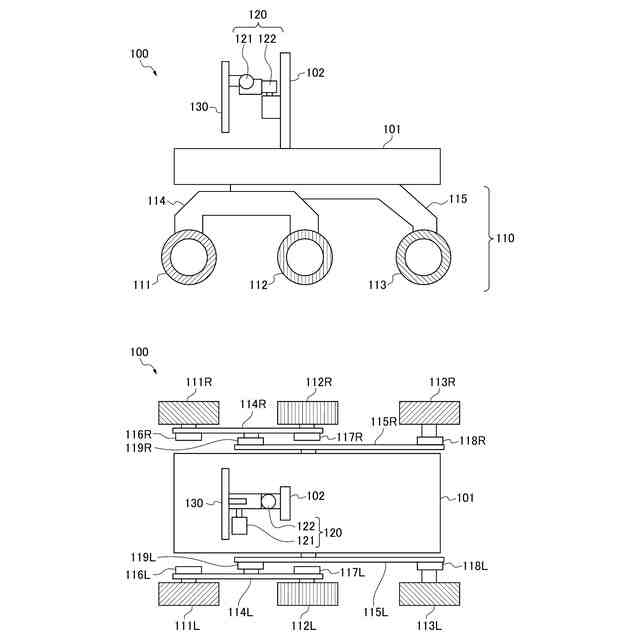
【解決手段】 ロッカーボギー車は、前輪、中輪及び後輪の各々が左右に一対ずつ設けられた6輪のロッカーボギー車であって、前記前輪及び前記中輪を軸支するボギーリンクと、前記後輪及び前記ボギーリンクを軸支するロッカーリンクと、前記ロッカーリンクに接続される本体と、画像を表示するモニタと、前記本体の上方に、前記モニタを上下方向又は左右方向に揺動可能に支持する首振り機構とを有し、前記本体は、コマンドを受信する受信部と、前記受信部によって受信されるコマンドに従って、前記首振り機構による前記モニタの揺動を制御する制御部とを有する。
【選択図】 図2
特許請求の範囲
【請求項1】
前輪、中輪及び後輪の各々が左右に一対ずつ設けられた6輪のロッカーボギー車であって、
前記前輪及び前記中輪を軸支するボギーリンクと、
前記後輪及び前記ボギーリンクを軸支するロッカーリンクと、
前記ロッカーリンクに接続される本体と、
画像を表示するモニタと、
前記本体の上方に、前記モニタを上下方向又は左右方向に揺動可能に支持する首振り機構とを有し、
前記本体は、
コマンドを受信する受信部と、
前記受信部によって受信されるコマンドに従って、前記首振り機構による前記モニタの揺動を制御する制御部とを有する
ロッカーボギー車。
続きを表示(約 1,800 文字)
【請求項2】
前記首振り機構は、
サーボモータによって前記モニタを上下方向に回転させるチルト機構と、
サーボモータによって前記モニタ及び前記チルト機構を左右方向に回転させるパン機構と
を有する請求項1に記載のロッカーボギー車。
【請求項3】
前記本体の上面から起立する支持柱と、
前記モニタ及び前記首振り機構を搭載し、前記支持柱を昇降するリフタ機構と
をさらに有する請求項1に記載のロッカーボギー車。
【請求項4】
前輪、中輪及び後輪の各々が左右に一対ずつ設けられた6輪のロッカーボギー車を遠隔操作する操作端末装置によって実行されるロッカーボギー車の操作方法であって、
前記ロッカーボギー車は、
前記前輪及び前記中輪を軸支するボギーリンクと、
前記後輪及び前記ボギーリンクを軸支するロッカーリンクと、
前記ロッカーリンクに接続される本体と、
画像を表示するモニタと、
前記本体の上方に、前記モニタを上下方向又は左右方向に揺動可能に支持する首振り機構とを有し、
前記本体は、
コマンドを受信する受信部と、
前記受信部によって受信されるコマンドに従って、前記首振り機構による前記モニタの揺動を制御する制御部とを有し、
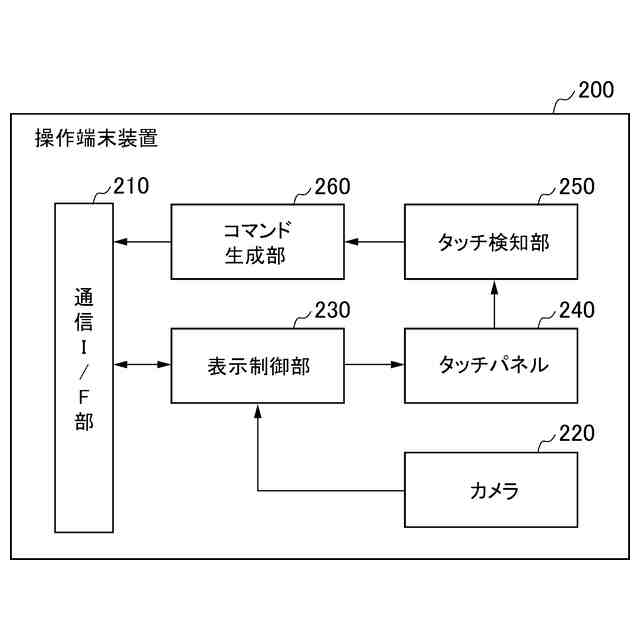
前記操作端末装置が、
前記操作端末装置を操作する操作者又は前記操作端末装置の動きを検出することと、
検出された動きに応じて前記首振り機構を制御するコマンドを生成することと、
生成されたコマンドを前記ロッカーボギー車へ送信することと
を有するロッカーボギー車の操作方法。
【請求項5】
前記検出することは、
カメラによって前記操作者を撮影することと、
撮影されて得られる撮影画像から前記操作者の顔を検出することと、
検出された顔の動きを検出することと
を有する請求項4に記載のロッカーボギー車の操作方法。
【請求項6】
前輪、中輪及び後輪の各々が左右に一対ずつ設けられた6輪のロッカーボギー車を遠隔操作する操作端末装置によって実行されるロッカーボギー車の操作方法であって、
前記ロッカーボギー車は、
前記前輪及び前記中輪を軸支するボギーリンクと、
前記後輪及び前記ボギーリンクを軸支するロッカーリンクと、
前記ロッカーリンクに接続される本体と、
画像を表示するモニタと、
前記本体の上方に、前記モニタを上下方向又は左右方向に揺動可能に支持する首振り機構とを有し、
前記本体は、
コマンドを受信する受信部と、
前記受信部によって受信されるコマンドに従って、前記首振り機構による前記モニタの揺動を制御する制御部とを有し、
前記操作端末装置が、
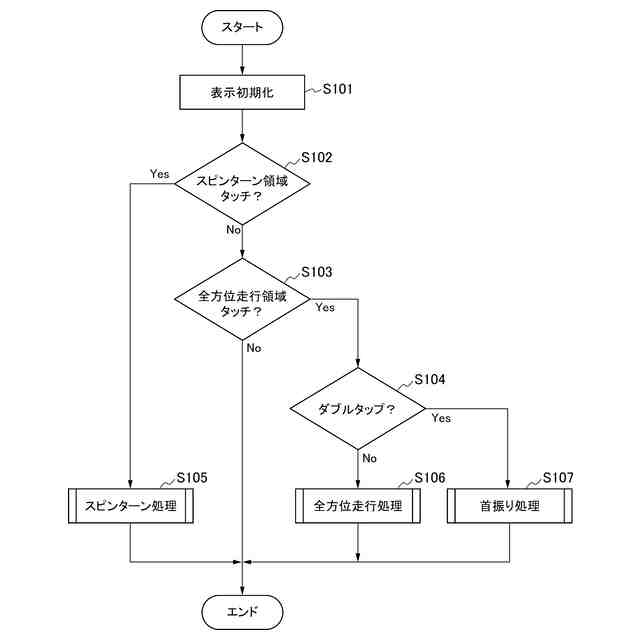
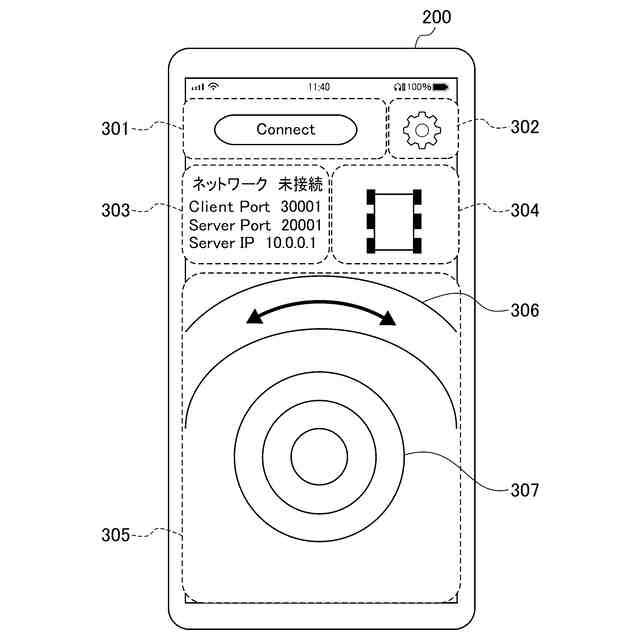
前記操作端末装置を操作する操作者によるタッチパネルへのタッチを検知することと、
検知されたタッチのタッチ位置の移動に応じて前記ロッカーボギー車に動作を指示するコマンドを生成することと、
生成されたコマンドを前記ロッカーボギー車へ送信することと
を有するロッカーボギー車の操作方法。
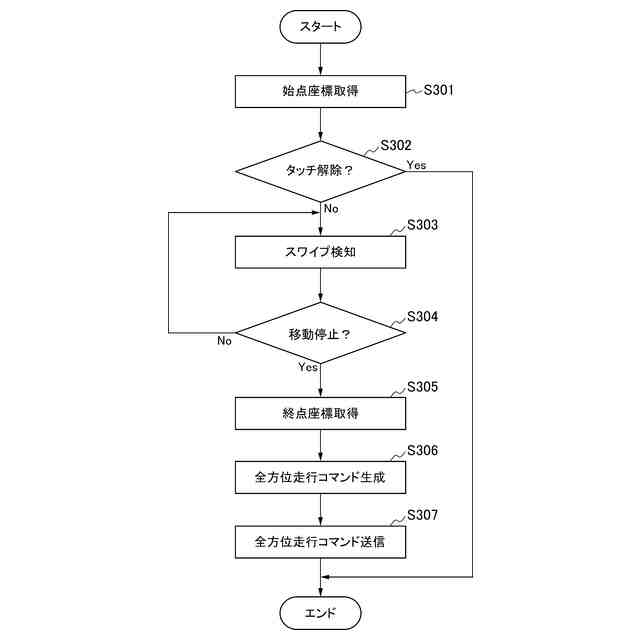
【請求項7】
前記生成することは、
前記ロッカーボギー車に全方位走行を指示する全方位走行コマンドを生成する
請求項6に記載のロッカーボギー車の操作方法。
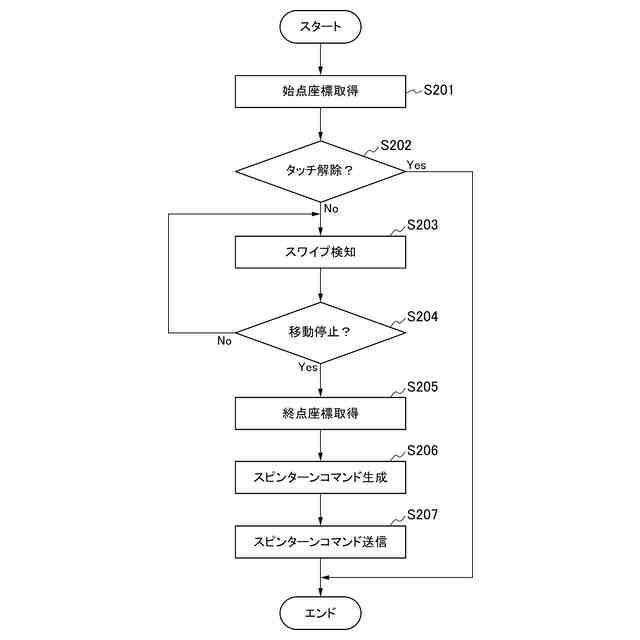
【請求項8】
前記生成することは、
前記ロッカーボギー車にスピンターンを指示するスピンターンコマンドを生成する
請求項6に記載のロッカーボギー車の操作方法。
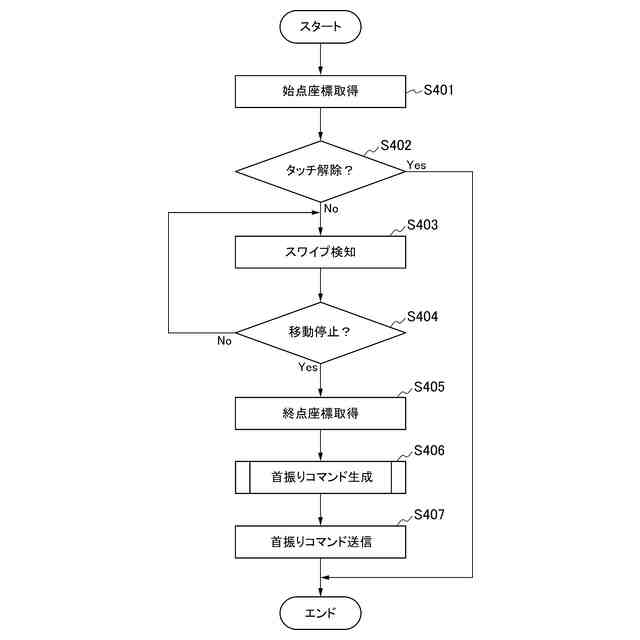
【請求項9】
前記生成することは、
前記首振り機構を制御する首振りコマンドを生成する
請求項6に記載のロッカーボギー車の操作方法。
【請求項10】
前記検知することは、
前記タッチパネルに対して同時にタッチするタッチ位置の数を判別し、
前記生成することは、
判別されたタッチ位置の数に応じて、前記ロッカーボギー車に異なる動作を指示するコマンドを生成する
請求項6に記載のロッカーボギー車の操作方法。
発明の詳細な説明
【技術分野】
【0001】
本開示は、ロッカーボギー車及びロッカーボギー車の操作方法に関する。
続きを表示(約 2,100 文字)
【背景技術】
【0002】
一般に、工場等の内部における資材の運搬や、自動倉庫等における物品の荷捌き等のために、車輪などの移動手段が設けられた移動ロボットを遠隔操作することが行われている。近年では、このような移動ロボットの段差踏破性能や旋回性能を向上するために、移動手段としてロッカーボギー車を採用することが検討されている。
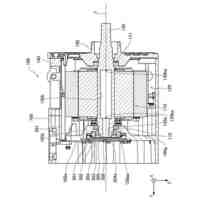
【0003】
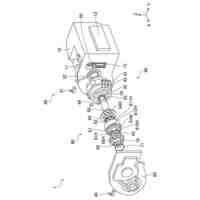
ロッカーボギー車は、左右に一対ずつ設けられた前輪、中輪、後輪の6輪を有するとともに、前輪及び中輪を各々軸支するボギーリンクと、ボギーリンク及び後輪を軸支するロッカーリンクと、ロッカーリンクに接続される本体とを有している。このような構造のロッカーボギー車によれば、ロッカーリンクに軸支されるボギーリンクを鉛直面内で回転させることにより、左右の前輪及び中輪を独立して自在に上下動させることができ、良好な段差踏破性能を得ることができる。さらに、例えば前輪及び後輪にメカナムホイールを採用し、中輪にオムニホイールを採用することにより、旋回性能を向上すると同時に、全方位走行を実現することができる。
【0004】
このようなロッカーボギー車を移動手段とする移動ロボットが工場や自動倉庫等で用いられる場合、遠隔地にいる操作者が移動ロボットを遠隔操作し、作業現場にいる作業者と移動ロボットが共同で作業することが考えられる。
【先行技術文献】
【特許文献】
【0005】
特開2023-6068号公報
特開2023-128705号公報
特開2022-165676号公報
特開2021-13159号公報
【発明の概要】
【発明が解決しようとする課題】
【0006】
しかしながら、ロッカーボギー車を備える移動ロボットと、作業現場の作業者とが共同作業をする場合には、移動ロボットを操作する操作者と作業現場の作業者との間での十分な意思疎通が困難であるという問題がある。すなわち、人間同士の共同作業であれば、言語によるコミュニケーションに加えて目配せやうなずきなどの非言語コミュニケーションが容易に行われて、円滑に作業を進めることができるのに対し、移動ロボットと作業者との間では、非言語コミュニケーションが成立しない。この結果、移動ロボットと作業者の共同作業の効率が十分に向上しないことがある。
【0007】
作業現場の作業者と移動ロボットの操作者とがコミュニケーションを取るために、移動ロボット及び移動ロボットの操作端末にカメラ及びモニタを取り付け、作業現場の作業者と遠隔地の操作者とが映像及び音声によって互いに意思疎通を図ることも考えられる。しかし、この場合には、作業者及び操作者に常にカメラの撮影範囲に位置することや常にモニタを視認することなどの行動の制約が課され、作業効率が低下する恐れがある。また、映像や音声の品質によっては、非言語コミュニケーションによる合図等を十分に確認することができない可能性もある。
【0008】
本開示は、上記に鑑みてなされたものであり、遠隔操作時の非言語コミュニケーションを実現し、作業の効率化を図ることができるロッカーボギー車及びロッカーボギー車の操作方法を提供することを目的とする。
【課題を解決するための手段】
【0009】
本開示の一態様によれば、ロッカーボギー車は、前輪、中輪及び後輪の各々が左右に一対ずつ設けられた6輪のロッカーボギー車であって、前記前輪及び前記中輪を軸支するボギーリンクと、前記後輪及び前記ボギーリンクを軸支するロッカーリンクと、前記ロッカーリンクに接続される本体と、画像を表示するモニタと、前記本体の上方に、前記モニタを上下方向又は左右方向に揺動可能に支持する首振り機構とを有し、前記本体は、コマンドを受信する受信部と、前記受信部によって受信されるコマンドに従って、前記首振り機構による前記モニタの揺動を制御する制御部とを有する。
【0010】
また、本開示の他の一態様によれば、ロッカーボギー車の操作方法は、前輪、中輪及び後輪の各々が左右に一対ずつ設けられた6輪のロッカーボギー車を遠隔操作する操作端末装置によって実行されるロッカーボギー車の操作方法であって、前記ロッカーボギー車は、前記前輪及び前記中輪を軸支するボギーリンクと、前記後輪及び前記ボギーリンクを軸支するロッカーリンクと、前記ロッカーリンクに接続される本体と、画像を表示するモニタと、前記本体の上方に、前記モニタを上下方向又は左右方向に揺動可能に支持する首振り機構とを有し、前記本体は、コマンドを受信する受信部と、前記受信部によって受信されるコマンドに従って、前記首振り機構による前記モニタの揺動を制御する制御部とを有し、前記操作端末装置が、前記操作端末装置を操作する操作者又は前記操作端末装置の動きを検出することと、検出された動きに応じて前記首振り機構を制御するコマンドを生成することと、生成されたコマンドを前記ロッカーボギー車へ送信することとを有する。
(【0011】以降は省略されています)
この特許をJ-PlatPat(特許庁公式サイト)で参照する
関連特許
株式会社明電舎
回転機
2か月前
株式会社明電舎
ドローン
2か月前
株式会社明電舎
成膜装置
1か月前
株式会社明電舎
車両固定装置
2か月前
株式会社明電舎
車両固定装置
2か月前
株式会社明電舎
負荷制御装置
1か月前
株式会社明電舎
負荷制御装置
1か月前
株式会社明電舎
負荷制御装置
1か月前
株式会社明電舎
アクチュエータ
4日前
株式会社明電舎
ロータ及び回転機
2か月前
株式会社明電舎
電力変換システム
12日前
株式会社明電舎
電流制御システム
1か月前
株式会社明電舎
電力変換システム
4日前
株式会社明電舎
センサ固定用治具
2か月前
株式会社明電舎
サスペンション装置
4日前
株式会社明電舎
オゾン水の生成装置
2か月前
株式会社明電舎
オゾン水の生成装置
2か月前
株式会社明電舎
オゾン水の生成装置
2か月前
株式会社明電舎
遮断器のリンク機構、遮断器
2か月前
株式会社明電舎
ロータ、回転電機及び車両駆動用装置
2か月前
株式会社明電舎
水冷式回転機のフレーム、及びその製造方法
2か月前
株式会社明電舎
目標車速パターンデータ生成方法及び試験方法
2か月前
株式会社明電舎
ロッカーボギー車及びロッカーボギー車の操作方法
4日前
株式会社明電舎
電力変換装置および電力変換装置のゲート指令生成方法
2か月前
株式会社明電舎
出力調整機構、電界放射装置及び電界放射装置の出力制御方法
2か月前
国立大学法人長岡技術科学大学
グリッドフォーミングインバータの制御装置および制御方法
2か月前
株式会社豊田自動織機
産業車両
3か月前
株式会社カネカ
製造システム
3か月前
オムロン株式会社
スレーブ装置
2か月前
ローム株式会社
基準電圧源
3か月前
株式会社熊谷組
障害物の検出方法
2か月前
愛知製鋼株式会社
車両用システム
3か月前
株式会社クボタ
作業車
1か月前
株式会社クボタ
作業車
11日前
新電元工業株式会社
作業用ロボット
今日
新電元工業株式会社
作業用ロボット
2か月前
続きを見る
他の特許を見る



 特許ウォッチ
特許ウォッチ